自动驾驶混行条件下的重载货车编组控制方法与流程
本发明涉及无人驾驶,特别涉及自动驾驶混行条件下的重载货车编组控制方法。
背景技术:
1、智能网联车辆(cav,connected autonomous vehicle)可通过v2x通信技术,与道路环境信息进行交互。智能网联车辆可以实现协同自适应巡航控制(cooperativeadaptive cruise control,cacc)。
2、同时,在自动驾驶环境下,拟编组运行的无人卡车间可通过无线通信实现车辆间的“对话”,完成同步加速与减速过程。但对,关于无人驾驶货车的编组原则,尤其是在人工驾驶与自动驾驶车辆混行场景下的编组控制方面尚未有进一步的研究。
3、据已有研究显示,自动驾驶车辆配备的安全装置可以减少31%的高速公路上的伤亡事故;并可以利用车联网技术实现车流量的优化配置,相较于手动驾驶,自动驾驶能够提高4%-10%的燃油利用效率。
4、此外,无人驾驶不存在疲劳驾驶的问题,卡车可以24小时连续作业,对于物流企业来说能够省下相当大的成本。节约燃料和运输行业对于自动驾驶卡车有着巨大的需求,而且现在得生活离不开运输,自动驾驶卡车市场具有巨大得潜力,所以得到了许多大型企业的支持
5、2018年gil domingues通过对自动驾驶车辆进行编组行为的刻画,通过设置多种具有通用性的场景,对各种场景的自动驾驶编组行为进行刻画,并且通过城市交通仿真软件(sumo,simulation of urben mobility),对提出的各场景进行仿真模拟,成功验证了通过在特定场景下采取编组行驶策略,车辆之间能够让信息互相传递提高移动通信能力。
6、2020年alexander h.taylor利用编组长度为8辆车的控制策略,分别在道路处于高峰流量、低峰流量、平峰流量的情况下进行仿真研究,结果表明编组行驶能够有效的减少自动驾驶卡车的风阻和坡度阻力的影响,能够减少能量消耗。现有重载货车编组控制方法聚焦于特定场景或是特定的编组长度,通过对自动驾驶编组行为进行跟驰模型的建模刻画,通过仿真模拟以研究自动驾驶重载货车编组控制对通行效率和经济性的影响,而较少有考虑车辆队列在通行过程中的解散和重组情况,以及对于自动驾驶混行条件下车辆加入货车编组队列这一场景的细致化分析。
7、因此,在自动驾驶混行条件下,如何依靠路侧单元(rsu)和移动边缘计算(mec),实现高效、安全且广泛适用的自动驾驶重载货车编组控制方法成为本领域技术人员急需解决的技术问题。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明提供自动驾驶混行条件下的重载货车编组控制方法,实现的目的是支持高效率的车队编组行驶,同时亦可大幅提升运输过程中的安全性和时效性。
2、为实现上述目的,本发明公开了自动驾驶混行条件下的重载货车编组控制方法,用于控制自动驾驶状态的目标重载货车驶入车队;所述车队包括最少2辆自动驾驶状态的重载货车;所述目标重载货车驶入的位置为所述车队中任意两辆所述重载货车之间,步骤如下:
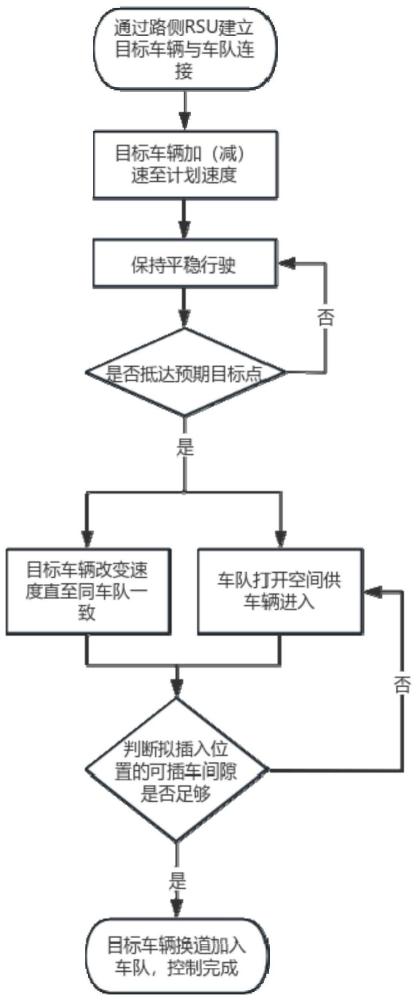
3、步骤1、通过路侧rsu建立所述目标重载货车与所述车队之间的通讯连接,通过所述rsu控制所述目标重载货车和所述车队在变速过程中保持恒定的加速度或者减速度,并计算所述目标重载货车与所述车队内预期驶入位置的纵向距离s0;
4、步骤2、控制所述目标重载货车加速/减速至计划速度并保持平稳行驶,直至预期减速/加速目标点;
5、步骤3、控制所述目标重载货车改变行驶速度直至与所述车队行驶速度一致,此时所述目标重载货车抵达所述车队内预期驶入位置;
6、此时,所述目标重载货车同所述车队以相同速度并排行驶,且所述目标重载货车正位于能够插入所述车队的预期位置;
7、步骤4、令所述车队在预期位置打开插车空间供所述目标重载货车驶入,判断所述目标重载货车拟驶入位置的插车空间是否足够;
8、步骤5、在所述插车空间足够时,所述目标重载货车完成加入过程,否则返回步骤4,进一步降低重载货车减速至预定点后的速度以满足驶入位置的插车空间要求。
9、优选的,所述纵向距离s0的计算公式如下:
10、s0=x+t1(vp-v1);
11、其中,vp为所述车队平稳状态下的行驶速度;
12、v1为受到编组邀请时,目标重载货车的平稳行驶速度,上述值由路侧感知设备采集并上传至邻近路侧单元rsu;
13、t1为一固定值,在(0,t1)时间段内,所述目标重载货车未接收到编组邀请,在t1后,所述目标重载货车开始编组准备,x为0时刻目标重载货车与所述车队内预期驶入位置的纵向距离。
14、更优选的,在步骤2中,所述目标重载货车加速/减速至计划行驶速度过程中的位移s1为,计算公式为:
15、
16、其中,vc为所述目标重载货车追赶所述车队过程中平稳运行的计划行驶速度,计算公式为:
17、
18、vmax为道路最高限速;
19、a1为所述目标重载货车加速/减速至计划行驶速度过程中的平均加速度,计算公式为:
20、
21、amax为驾驶人可接受的最大加/减速度;
22、所述目标重载货车平稳行驶过程中的位移s2为:
23、s2=s0-s1-s3;
24、其中,s3为预期减速(加速)目标点同所述车队内预期驶入位置的纵向距离,由mec根据已上传至rsu的重载货车信息计算得到,其表达式为:
25、
26、所述目标重载货车加速/减速至计划行驶速度过程所花费时间t2为:
27、
28、所述目标重载货车加速/减速至计划行驶速度过程包括以下约束:
29、
30、更优选的,步骤3中,控制所述目标重载货车改变行驶速度直至与所述车队行驶速度一致花费的时间t3的计算公式如下:
31、
32、更优选的,步骤4中,在预期位置打开插车空间的长度smid为:
33、
34、预期位置打开插车空间所用时间tmid为:
35、
36、其中,ls为所述车队内部各重载货车在行驶过程中的间距;vmid为重载货车减速至预定点后的速度,由mec根据已知重载货车信息计算得到,其表达式为:
37、vmid=k·vp;k为小于1的参数,取0.8为初始值;
38、在预期位置打开插车空间过程包括以下约束:
39、
40、dsafe为供所述目标重载货车变道驶入和编组行驶的安全间距;
41、l为所述目标重载货车的车身长度;
42、vmin为高速公路当前车道的最低限速。
43、更优选的,在步骤5中,若所述插车空间足够所述目标重载货车加入所述车队花费的时间t为:
44、t=t1+t2+max(t3,tmid)+t4+t5
45、其中,t4为所述目标重载货车换道进入所述车队所用时间,为常数值;
46、t5为所述车队中预期驶入位置往后的重载货车在加入过程完成后,重新和前方车队形成一队并恢复平稳行驶所用时间,计算公式如下:
47、
48、更优选的,在步骤5中,降低重载货车减速至预定点后的速度的方法为缩小参数k。
49、优选的,其特征在于,在所述车辆抵达预期减速/加速目标点、所述车队打开插车空间时,所用减/加速度均为驾驶人可接受的最大减(加)速度amax;同时通过mec,合理部署所述目标车辆追赶过程中的加速度a1和速度vc,以降低所述目标车辆加入队列的总时间。
50、优选的,通过所述rsu对所述车队进行提前的队列打开,亦或是将所述目标车辆预期减速/加速目标点提前。
51、本发明的有益效果:
52、本发明可以实现所述目标车辆快速、安全、高效地加入所述车队,有助于提高高速公路混合交通流整体的通行能力和通行安全性。
53、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
- 还没有人留言评论。精彩留言会获得点赞!