一种校园非机动车辆停车位分配引导方法、系统及装置
本发明涉及智能交通领域,具体来说,涉及一种校园非机动车辆停车位分配引导方法、系统及装置。
背景技术:
1、校园非机动车辆停车位的分配和引导是当前高校面临的一个难题。随着非机动车数量的增加,有限的校园空间使得停车位变得紧张,停车规范性较差,导致停车区域利用率低下。
2、传统的非机动车停放采用先到先得的停车方式,这种方式虽然简单,但由于缺乏有效的管理和指导,停放规范性较差,往往导致实际占用的空间远大于理论所需,从而降低了停车区域的利用率;首先,由于不同类型非机动车的尺寸和型号不同,对于先停在停放区域内的车辆,可能会占用较多的空间,导致后续停放的车辆难以找到合适的位置;其次,当停车区域与道路有高差时,需要提供斜坡橡胶垫来方便非机动车行走,但斜坡橡胶垫并未摆放在停车区域内所对应的空闲位置上,骑行者需要推动斜坡橡胶垫至空闲区域正前方才能将车辆推放至空闲区域内;特别是在早晚高峰时段,由于斜坡橡胶垫的数量有限,不同骑行者需要排队等待使用,进一步增加了停放非机动车的时间成本,在这种情况下,停车区域内空闲位置的有序管理和合理规划显得尤为重要。
3、因此,如何合理分配停车区域内空闲位置并引导骑行者快速找到空余车位成为了亟待解决的问题。
4、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种校园非机动车辆停车位分配引导方法、系统及装置,具备更高效率地使用有限的停放区域,有效缓解校园寻找车位的问题,提升自动化程度的优点,进而解决现有技术中由于非机动车数量快速增长在有限区域内寻找非机动车位困难的问题。
2、为此,本发明采用的具体技术方案如下:
3、根据本发明的一个方面,提供了一种校园非机动车辆停车位分配引导方法,该校园非机动车辆停车位分配引导方法包括以下步骤:
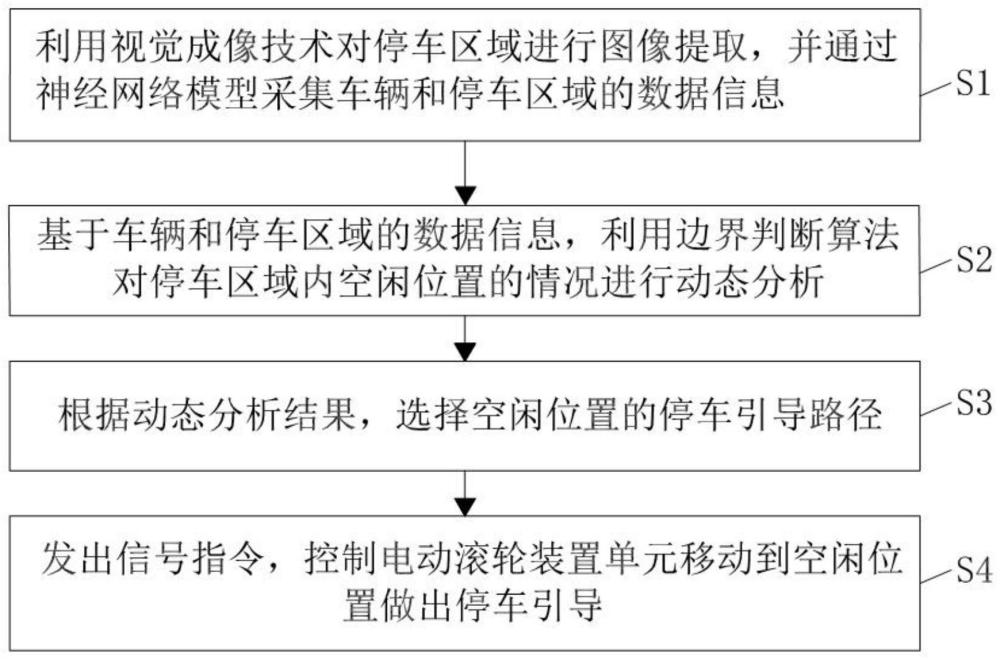
4、s1、利用视觉成像技术对停车区域进行图像提取,并通过神经网络模型采集车辆和停车区域的数据信息;
5、s2、基于车辆和停车区域的数据信息,利用边界判断算法对停车区域内空闲位置的情况进行动态分析;
6、s3、根据动态分析结果,选择空闲位置的停车引导路径;
7、s4、发出信号指令,控制电动滚轮装置单元移动到空闲位置做出停车引导。
8、进一步的,利用视觉成像技术对停车区域进行图像提取,并通过神经网络模型采集车辆和停车空间的数据信息包括以下步骤:
9、s11、利用视觉成像技术对停车区域进行图像提取,得到停车区域边缘数据;
10、s12、基于停车区域边缘数据计算停车区域总面积;
11、s13、利用训练后的神经网络模型对车辆进行监控识别,采集车辆和停车区域的数据信息。
12、进一步的,利用所训练的神经网络模型对车辆进行监控识别,采集车辆和停车区域的数据信息包括以下步骤:
13、s131、利用视觉成像技术对停放车辆进行图像采集;
14、s132、对采集的图像进行标注,制作数据集;
15、s133、利用数据集对神经网络模型进行训练;
16、s131、利用训练后的神经网络模型对车辆进行监控识别,采集车辆和停车区域的数据信息;
17、其中,车辆和停车区域的数据信息包括不同类型非机动车和同类型非机动车的数量,有车辆停放的区域和空闲区域的尺寸。
18、进一步的,基于车辆和停车区域的数据信息,利用边界判断算法对停车区域内空闲位置的情况进行动态分析包括以下步骤:
19、s21、基于车辆和停车区域的数据信息,根据第一边界判断条件对停车区域内空闲位置的情况进行一次判断;
20、s22、基于车辆和停车区域的数据信息,根据第二边界判断条件对停车区域内空闲位置的情况进行二次判断;
21、s23、根据一次判断与二次判断的结果,对停车区域内空闲位置的情况进行动态分析。
22、进一步的,基于车辆和停车区域的数据信息,根据第一边界判断条件对停车区域内空闲位置的情况进行一次判断包括以下步骤:
23、s211、基于车辆和停车区域的数据信息,得到停车区域长度与不同类型非机动车车辆数据;
24、s212、根据不同类型非机动车车辆数据,计算不同类型非机动车车辆宽度总和;
25、s213、基于停车区域长度与不同类型非机动车车辆宽度总和,利用第一边界判断条件对停车区域内空闲位置的情况进行一次判断。
26、进一步的,基于车辆和停车区域的数据信息,根据第二边界判断条件对停车区域内空闲位置的情况进行二次判断包括以下步骤:
27、s221、基于车辆和停车区域的数据信息,对有车辆停放的区域及空闲区域进行识别;
28、s222、根据识别结果对有车辆停放的区域及空闲区域进行网格划分;
29、s223、基于网格划分结果,利用第二边界判断条件对停车区域内空闲位置的情况进行二次判断。
30、进一步的,根据动态分析结果,选择空闲位置的停车引导路径包括以下步骤:
31、s31、根据动态分析结果,得到电动滚轮装置单元位于停车区域的相对位置;
32、s32、根据划分的网格数量和网格类型,逐步判断电动滚轮装置单元位于停车区域的相对位置所属的网格类型并计数;
33、s33、根据判断结果,选择空闲位置的停车引导路径。
34、根据本发明的另一个方面,还提供了一种校园非机动车辆停车位分配引导系统,该校园非机动车辆停车位分配引导系统包括:
35、数据采集模块,用于利用视觉成像技术对停车区域进行图像提取,并通过神经网络模型采集车辆和停车区域的数据信息;
36、动态分析模块,用于基于车辆和停车区域的数据信息,利用边界判断算法对停车区域内空闲位置的情况进行动态分析;
37、路径引导模块,用于根据动态分析结果,选择空闲位置的停车引导路径;
38、信号控制模块,用于发出信号指令,控制电动滚轮装置单元移动到空闲位置做出停车引导。
39、根据本发明的另一个方面,还提供了一种校园非机动车辆停车位分配引导装置,该校园非机动车辆停车位分配引导装置包括视觉成像控制单元及电动滚轮装置单元;
40、其中,视觉成像控制单元,用于利用无线监控摄像头拍摄停车区域的画面,并利用训练后的神经网络算法模型对停车区域的画面进行识别,对有非机动车停放的区域及空闲区域进行区分,发出空闲位置的引导信号;
41、电动滚轮装置单元,用于接收视觉成像控制单元发出的空闲位置的引导信号,并移动斜坡橡胶垫对骑行者进行停车引导;
42、视觉成像控制单元包括监控摄像模块、安装模块、信号收发模块及控制后台模块:
43、其中,监控摄像模块,用于利用无线监控摄像头拍摄停车区域内的停放位置;
44、安装模块,用于将监控摄像模块安装在停车区域一侧的立杆顶端,对停车区域进行观察;
45、信号收发模块,用于将信号发出传递给电动滚轮装置单元;
46、控制后台模块,用于识别监控摄像模块拍摄的画面,对有非机动车停放的区域及空闲区域进行区分;
47、其中,控制后台模块包括:
48、数据采集模块,用于利用视觉成像技术对停车区域进行图像提取,并通过神经网络模型采集车辆和停车区域的数据信息;
49、动态分析模块,用于基于车辆和停车区域的数据信息,利用边界判断算法对停车区域内空闲位置的情况进行动态分析;
50、路径引导模块,用于根据动态分析结果,选择空闲位置的停车引导路径;
51、信号控制模块,用于发出信号指令,控制电动滚轮装置单元移动到空闲位置做出停车引导。
52、进一步的,电动滚轮装置单元包括引导模块、连接模块、移动模块、信号处理模块及电源模块;
53、其中,引导模块,用于提供斜坡橡胶垫对骑行者进行引导;
54、连接模块,用于将引导模块与两侧的移动模块进行连接固定;
55、移动模块用于利用电动滚轮装置带动引导模块进行移动;
56、信号处理模块用于接收视觉成像控制单元发出的信号;
57、电源模块用于利用可拆卸电源为电动滚轮装置单元提供动力。
58、本发明的有益效果为:
59、(1)本发明有效解决了校园停车场内骑行者停车时需要寻找停车位和推动斜坡橡胶垫的问题,通过引入先进的自动化系统,骑行者无需人工推动斜坡橡胶垫,也不需要排队等候,大大提高了停车效率,不仅令停车过程更为便捷,还使有限的停车区域能够被更高效的利用,从而有效缓解了校园非机动车寻找车位的难题。
60、(2)本发明能够避免因寻找空闲区域和推动斜坡橡胶垫而带来的不便,避免了一些骑行者因怕麻烦而导致的乱停放等问题,有助于提升校园非机动车停车区域的利用率,确保停车过程更为有序。
61、(3)本发明能够提升停车区域综合效率运转,通过快速寻找非机动车位,有助于减少骑行者寻找停车位所需的时间,进而提高整个停车区域的运转效率,可以实现快速寻找非机动车位,为骑行者提供了更为高效、便捷的停车体验。
- 还没有人留言评论。精彩留言会获得点赞!