一种交通流需求引导下的无人机航路网络设计方法和装置
本发明涉及空中交通管理及无人机,尤其涉及一种交通流需求引导下的无人机航路网络设计方法和装置。
背景技术:
1、作为无人机空中运行的重要物理空间,航路设计的合理性将制约飞行活动的安全性与高效性,因此,有必要对低空无人机航路进行科学规划,以满足未来无人机大范围商业化应用发展的需求。
2、传统的航路规划集中在单个无人机的路径规划层面,目的是结合无人机目标任务搜索空域环境下从起点到目标点的最优航迹,常用方法包括dijkstra算法、prim算法、kruskal算法、a*算法等图搜索算法。然而,单个无人机角度出发的航路规划多为任务导向的一次性用途,其空域有效性将在无人机任务完成后终止。此外,单个无人机的规划航路仅适用对该特定无人机的安全管控,而随着低空空域无人机运行数量和应用范围的飞速扩张,运行在同一区域的大量无人机之间的航路规划工作量和协调难度将大大提升。
3、目前,现有技术中的无人机航路规划方法集中在单个无人机的路径规划层面而非交通流层面。事实上,未来低空空域无人机运行数量和应用范围将飞速扩张,大量无人机的个体航路规划工作将存在交叉。
4、因此,有必要从交通流层面而非单一架次层面对空域内的无人机进行统一管理和调度,建立全局性和通用性较强的公共航路网络,从而提高低空空域资源使用的有效性并规范无人机飞行活动的有序性。
技术实现思路
1、本发明的实施例提供了一种交通流需求引导下的无人机航路网络设计方法和装置,以实现最大限度保障无人机交通流运行的安全水平。
2、为了实现上述目的,本发明采取了如下技术方案。
3、根据本发明的一个方面,提供了一种交通流需求引导下的无人机航路网络设计方法,包括:
4、对无人机航路网络的节点进行选址,对无人机航路网络拓扑进行初始化;
5、基于初始化的无人机航路网络拓扑以最小化交通流运行风险为目标构建无人机航路网络的优化模型;
6、通过遗传算法求解所述无人机航路网络的优化模型,获得最小化交通流运行风险的无人机航路网络的设计方案。
7、优选地,所述的对无人机航路网络的节点进行选址,包括:
8、利用关键性排序方法从多个备选航路汇聚点中选取适合无人机起降和中转的航路节点,建立m个备选航路汇聚点在n个选址要素下的原始评价矩阵xij=(xij)m×n,xij为选址要素i下的第j个备选航路汇聚点的值;
9、对原始评价矩阵xij进行无量纲化处理,得到消除不同指标之间数量级差异的标准评价矩阵
10、计算选址要素i对应的权重值wi,其中
11、
12、式中ei为选址要素i的熵值;
13、
14、确定每个选址要素的最佳解和最劣解
15、
16、计算各备选航路汇聚点的关键性分值rj,排序得到前φ个航路汇聚点,将前φ个航路汇聚点作为无人机航路网络的节点;
17、
18、优选地,所述的对无人机航路网络拓扑进行初始化,包括:
19、以无人机最大航程为依据建立航路汇聚点的邻接矩阵a=(amn)φ×φ,若第个m航路汇聚点与第n个汇聚点之间的航段长度ω为裕度系数,则amn=1,反之amn=0,按预设栅格粒度对空域内的地理环境进行分割处理,采用变长a*路径搜索算法生成两相连航路汇聚点之间的最优航路,包括如下的处理步骤:
20、step1:以第个m航路汇聚点与第n个汇聚点之间的直线连线为中心,设置缓冲带,形成初始化的搜索空间;
21、step2:定义栅格点x的估计成本函数f(x),包括实际航程成本g(x)和预估航程成本h(x):
22、
23、g(x)为起始汇聚点m至待扩展栅格点x的实际航程,h(x)为待扩展栅格点x至终止汇聚点n的预估航程,(xx,yx)为栅格点坐标;
24、step3:建立feasible_set和finish_set列表,将起始汇聚点m作为父节点,计算起始汇聚点m周围各自由栅格点的估计成本函数值,并将估计成本函数值加入feasible_set列表,按照局部搜索空间内障碍栅格的比例确定搜索步长,当障碍栅格比例低于30%时,步长采用2个栅格单元,否则采用1个栅格单元;
25、step4:选择feasible_set列表中f(x)最小的栅格点p作为下一扩展栅格点,并将栅格点p加入finish_set列表,判断栅格点p是否为终止汇聚点n,若是,则转向step7,否则转向step5。
26、step5:将栅格点p点作为新的父节点,按栅格点p点周边障碍栅格比例所对应的搜索步长搜索相邻自由栅格点;
27、step6:重新计算估计成本函数f(x),返回step4。
28、step7:存储搜索算法得到的最优路径,该最优路径为使得第个m航路汇聚点与第n个汇聚点之间航路成本最小的自由栅格点序列。
29、优选地,所述的基于初始化的无人机航路网络拓扑以最小化交通流运行风险为目标构建无人机航路网络的优化模型,包括:
30、统计存在无人机飞行需求的起始和终止航路汇聚节点的交通流组合分布k(k=φ(φ-1)/2),以最小化交通流运行风险为目标,建立无人机航路网络n(v,e)的优化模型如下:
31、
32、其中,n为待优化的航路网络拓扑,包括φ个航路汇聚节点,e为n中所有航路的集合e={emn|m,n∈v且amn=1},fmn、lmn和rmn分别为航路emn上的航路流量、航路里程和航路拥堵程度,定义为:
33、
34、fk为第k个交通流od对之间的流量,rk为交通流k的可选路径数,为交通流k选择路径i的概率,为0-1变量,当交通流k的选择路径i包含emn时反之为0,cmn为航路容量;
35、所述优化模型满足如下约束:
36、
37、fmn≥fo (10)
38、约束(9)保证无人机路径流量与od对飞行流量守恒,即od对可行路段上的流量之和等于该od对间的交通需求量,约束(10)为航路利用率约束,要求航路分配流量不得小于航路启用阈值。
39、优选地,所述的通过遗传算法求解所述无人机航路网络的优化模型,获得最小化交通流运行风险的无人机航路网络的设计方案,包括:
40、设置航路网络拓扑的二进制编码为上层编码,交通流量分配的实数编码为下层编码,采用双层编码的遗传算法求解所述无人机航路网络的优化模型,包括如下的处理步骤:
41、step1:随机生成初始种群p(0)={x1,x2,...xn},n为种群大小,xi为第i个染色体,由两层组成,考虑到交通流k在航路上的运行风险随已分配流量1,2,...k-1动态更新,令路径选择概率在当前运行风险最小的飞行路径i,i=1,2,...rk处取1,其余为0,即:
42、
43、step2:将适应度函数表示为目标函数倒数的形式,即fitness=1/r(n),风险值越小,适应度越高,被选择的概率就越大,对种群中染色体按照适应度大小进行从小到大线性排序,采用轮盘赌选择策略按照适应度值进行比例选择。
44、step3:对上层航路网络拓扑编码实行交叉操作,即对应交叉概率选择出两条染色体交换两者交叉点之后的网络拓扑编码,交叉后若产生非法染色体,则对染色体进行修复,对下层交通流量分配编码进行相应的调整;
45、step4:对上层航路网络拓扑编码实行变异操作,根据变异概率选择一条染色体并随机选择一个基因位赋予新值,若产生非法染色体,则采用修复方法对染色体进行修复;
46、step5:通过优胜劣汰重复生成新种群,直至超过最大迭代次数,将整体运行风险最小的最优染色体解码作为最终结果,得到最小化交通流运行风险的无人机航路网络的设计方案。
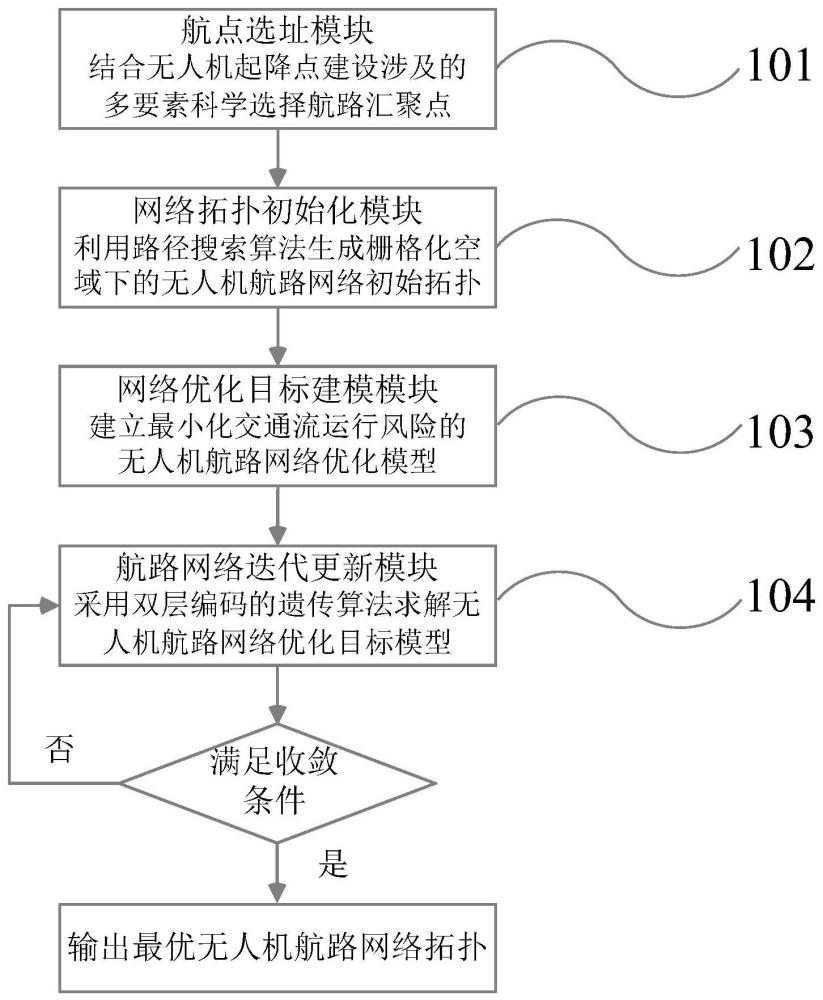
47、根据本发明的另一个方面,提供了一种交通流需求引导下的无人机航路网络设计装置,包括:航点选址模块、网络拓扑初始化模块、网络优化目标建模模块和航路网络迭代更新模块;
48、所述的航点选址模块,用于对无人机航路网络的节点进行选址;
49、所述的网络拓扑初始化模块,用于对无人机航路网络拓扑进行初始化;
50、所述的网络优化目标建模模块,用于基于初始化的无人机航路网络拓扑以最小化交通流运行风险为目标构建无人机航路网络的优化模型;
51、所述的航路网络迭代更新模块,用于通过遗传算法求解所述无人机航路网络的优化模型,获得最小化交通流运行风险的无人机航路网络的设计方案。
52、优选地,所述的航点选址模块,用于利用关键性排序方法从多个备选航路汇聚点中选取适合无人机起降和中转的航路节点,建立m个备选航路汇聚点在n个选址要素下的原始评价矩阵xij=(xij)m×n,xij为选址要素i下的第j个备选航路汇聚点的值;
53、对原始评价矩阵xij进行无量纲化处理,得到消除不同指标之间数量级差异的标准评价矩阵yij=(yij)m×n,
54、计算选址要素i对应的权重值wi,其中
55、
56、式中ei为选址要素i的熵值;
57、
58、确定每个选址要素的最佳解和最劣解
59、
60、计算各备选航路汇聚点的关键性分值rj,排序得到前φ个航路汇聚点,将前φ个航路汇聚点作为无人机航路网络的节点;
61、
62、优选地,所述的网络拓扑初始化模块,用于以无人机最大航程为依据建立航路汇聚点的邻接矩阵a=(amn)φ×φ,若第个m航路汇聚点与第n个汇聚点之间的航段长度ω为裕度系数,则amn=1,反之amn=0,按预设栅格粒度对空域内的地理环境进行分割处理,采用变长a*路径搜索算法生成两相连航路汇聚点之间的最优航路,包括如下的处理步骤:
63、step1:以第个m航路汇聚点与第n个汇聚点之间的直线连线为中心,设置缓冲带,形成初始化的搜索空间;
64、step2:定义栅格点x的估计成本函数f(x),包括实际航程成本g(x)和预估航程成本h(x):
65、
66、g(x)为起始汇聚点m至待扩展栅格点x的实际航程,h(x)为待扩展栅格点x至终止汇聚点n的预估航程,(xx,yx)为栅格点坐标;
67、step3:建立feasible_set和finish_set列表,将起始汇聚点m作为父节点,计算起始汇聚点m周围各自由栅格点的估计成本函数值,并将估计成本函数值加入feasible_set列表,按照局部搜索空间内障碍栅格的比例确定搜索步长,当障碍栅格比例低于30%时,步长采用2个栅格单元,否则采用1个栅格单元;
68、step4:选择feasible_set列表中f(x)最小的栅格点p作为下一扩展栅格点,并将栅格点p加入finish_set列表,判断栅格点p是否为终止汇聚点n,若是,则转向step7,否则转向step5。
69、step5:将栅格点p点作为新的父节点,按栅格点p点周边障碍栅格比例所对应的搜索步长搜索相邻自由栅格点;
70、step6:重新计算估计成本函数f(x),返回step4。
71、step7:存储搜索算法得到的最优路径,该最优路径为使得第个m航路汇聚点与第n个汇聚点之间航路成本最小的自由栅格点序列。
72、优选地,所述的网络优化目标建模模块,用于统计存在无人机飞行需求的起始和终止航路汇聚节点的交通流组合分布k(k=φ(φ-1)/2),以最小化交通流运行风险为目标,建立无人机航路网络n(v,e)的优化模型如下:
73、
74、其中,n为待优化的航路网络拓扑,包括φ个航路汇聚节点,e为n中所有航路的集合e={emn|m,n∈v且amn=1},fmn、lmn和rmn分别为航路emn上的航路流量、航路里程和航路拥堵程度,定义为:
75、
76、fk为第k个交通流od对之间的流量,rk为交通流k的可选路径数,为交通流k选择路径i的概率,为0-1变量,当交通流k的选择路径i包含emn时反之为0,cmn为航路容量;
77、所述优化模型满足如下约束:
78、
79、fmn≥fo (10)
80、约束(9)保证无人机路径流量与od对飞行流量守恒,即od对可行路段上的流量之和等于该od对间的交通需求量,约束(10)为航路利用率约束,要求航路分配流量不得小于航路启用阈值。
81、优选地,所述的航路网络迭代更新模块,用于设置航路网络拓扑的二进制编码为上层编码,交通流量分配的实数编码为下层编码,采用双层编码的遗传算法求解所述无人机航路网络的优化模型,包括如下的处理步骤:
82、step1:随机生成初始种群p(0)={x1,x2,...xn},n为种群大小,xi为第i个染色体,由两层组成,考虑到交通流k在航路上的运行风险随已分配流量1,2,...k-1动态更新,令路径选择概率在当前运行风险最小的飞行路径i,i=1,2,...rk处取1,其余为0,即:
83、
84、step2:将适应度函数表示为目标函数倒数的形式,即fitness=1/r(n),风险值越小,适应度越高,被选择的概率就越大,对种群中染色体按照适应度大小进行从小到大线性排序,采用轮盘赌选择策略按照适应度值进行比例选择。
85、step3:对上层航路网络拓扑编码实行交叉操作,即对应交叉概率选择出两条染色体交换两者交叉点之后的网络拓扑编码,交叉后若产生非法染色体,则对染色体进行修复,对下层交通流量分配编码进行相应的调整;
86、step4:对上层航路网络拓扑编码实行变异操作,根据变异概率选择一条染色体并随机选择一个基因位赋予新值,若产生非法染色体,则采用修复方法对染色体进行修复;
87、step5:通过优胜劣汰重复生成新种群,直至超过最大迭代次数,将整体运行风险最小的最优染色体解码作为最终结果,得到最小化交通流运行风险的无人机航路网络的设计方案。
88、由上述本发明的实施例提供的技术方案可以看出,本发明提出了一种交通流需求引导下的无人机航路网络设计方法及装置,通过无人机交通流需求分布与航路结构布局配置的有机匹配,构建合理集约的无人机航路网络拓扑结构,最大限度保障无人机交通流运行的安全水平。
89、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!