一种基于动态图注意力时空网络的道路交通安全预测方法
本发明涉及交通预测,尤其涉及一种动态图注意力网络的交通事故预测方法。
背景技术:
1、交通事故一直以来都是公共安全和城市管理领域的重要问题,事故不仅造成了人员伤亡和财产损失,还引发了交通拥堵、环境污染等一系列问题。因此,准确地预测交通事故发生的时间和地点对于提高交通安全和优化城市交通管理至关重要。借助道路、出租车、私家车轨迹和公共交通交易记录等传感器收集的海量城市交通数据,将交通大数据用于交通分析已成为智慧城市发展不可或缺的一部分。鉴于当前交通系统中车辆数的庞大且道路结构复杂,我们不仅需要在事故发生后了解其产生原因,更需要通过可靠和精确的交通事故预测模型来减少潜在的交通事故风险。通过模型和系统反馈的结果,交通当局可以主动分配公共资源并设计更好的交通规划策略来改善道路安全。
2、道路交通事故虽时有发生但却只占出行状况的极少比例,并且也存在着其发生原因的复杂性。因此,交通事故风险预测仍是一项具有挑战性的任务。现有的时空预测方法(例如交通量预测)不适合交通事故预测。最近的研究提出了基于图神经网络的模型,其具有简单的拓扑建模,它通过交通条件或空间邻接来建立相关性矩阵,进而处理简单的空间依赖性问题。另外,针对交通事故数据稀疏性问题也会使用一些特殊采样的方法。但是,这种简单构造的邻接矩阵可能无法准确反映由各种复杂因素所引起的交通事故的动态结构,对于其他一些相关信息(如poi类型和道路类型)对于准确预测事故发生也扮演着重要的角色。
3、早期的交通事故预测研究主要基于传统的统计方法,如回归分析、时间序列分析和马尔科夫链法、灰色预测法。这些方法通常基于线性假设,即假设不同变量之间的关系是线性的。然而,交通系统中的关系通常是复杂的非线性的,使得这些方法难以捕捉到真实世界中复杂的交互作用和非线性关系。
4、针对解决交通事故预测的常用机器学习方法包括决策树、随机森林、支持向量机等。机器学习方法能够处理大量数据和复杂特征之间的非线性关系,提高了预测准确性。但是这些简单利用神经网络的模型或者没有考虑到交通网络中隐藏的时空依赖性,或者不能有效提取这种时空依赖性,导致其泛化性能和模型表现都比较差。
5、基于图的网络已被证明在交通流预测中是有效的,近年来,基于图神经网络的交通事故预测方法引起了广泛的关注和研究。尽管这些研究解决了交通事故数据的时空模式,并取得了比传统方法更好的预测结果。但是,这些方法只能提取邻近节点的空间信息,而不同空间位置节点的重要性不能仅仅通过空间的邻近来区分,因此没有充分考虑到不同空间位置节点的重要性。
6、针对当前时空图卷积网络忽略各空间节点重要性存在差异以及难以准确识别交通模式的时空相关性等问题,我们设计出了一种动态图注意力时空网络用于交通事故预测。
技术实现思路
1、本发明的目的是为了解决现有技术中当前时空图卷积网络忽略各空间节点重要性存在差异以及难以准确识别交通模式的时空相关性等问题,设计出了一种动态图注意力时空网络用于交通事故预测。
2、为了实现上述目的,本发明的技术方案如下:
3、一种动态图注意力网络的交通事故预测方法,包括以下步骤:
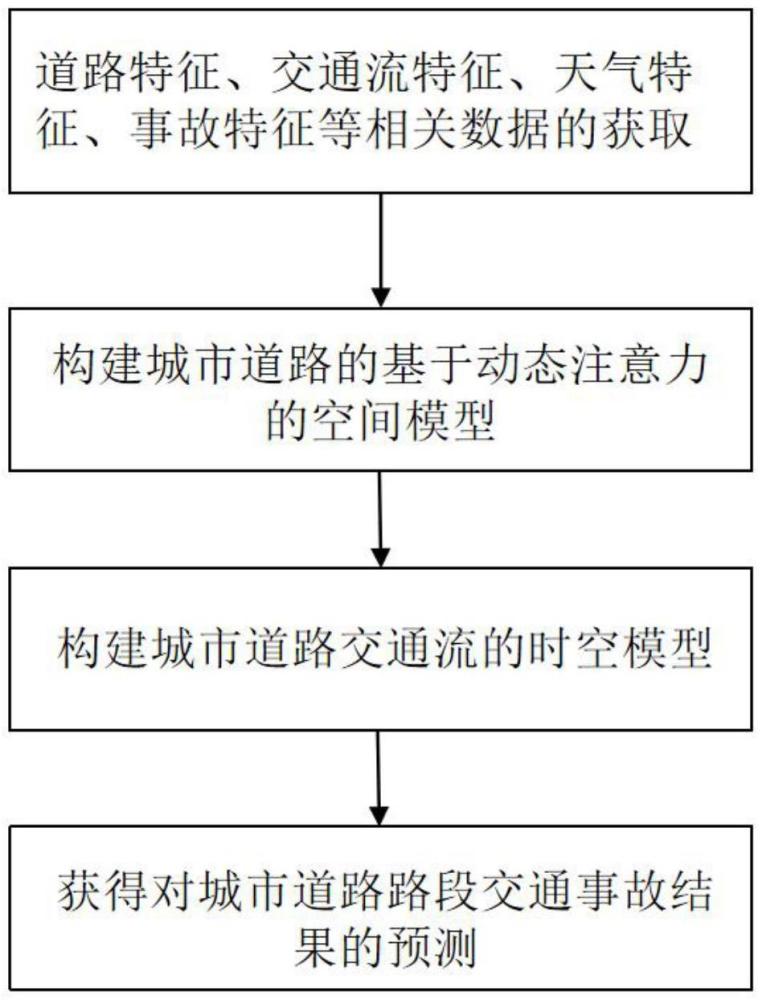
4、构建城市道路交通网络:获取城市道路各路段的空间几何数据、路段周围重要建筑物数据、历史交通流数据、历史交通事故数据、历史天气数据并进行预处理,建立路段与交叉口的拓扑关系,构建出城市道路交通网络;
5、构建城市道路交通网络下基于动态图注意力模块:基于城市道路交通路网信息,通过路段与其周围重要建筑物数据同历史交通流数据的动态变化来调整依赖重要性程度;
6、构建基于图卷积网络和扩展卷积网络的时空网络模块:根据历史交通事故数据、历史交通流数据输入特征,学习道路交通网络在时空上的特征信息,最后融合天气等外部数据来综合各个维度的信息;
7、城市道路交通事故预测结果的获得:通过构建的动态图注意力模块、时空网络模块及天气信息融合模块获得未来的道路路段事故预测结果。
8、所构建城市道路交通网络包括以下步骤:
9、利用城市道路交通网络,将所有城市道路上的各路段定义为网络结构上的结点;
10、通过设置节点代表城市路段,而路段之间交叉口代表节点的连通性,体现为在路网结构中节点之间的弧段,将城市道路网定义为拓扑图;
11、城市道路网络定义如下:
12、将城市道路网络定义为无向图g=<v,e>,将每个路段视为一个节点,其中v是节点集合|v|=n,n是路段数,e是边的集合,表示路段之间的交叉口,其中g为城市道路网络预定义的拓扑图。
13、所构建城市道路网络下基于动态图注意力的模块包括以下步骤:
14、获得路段之间的重要性程度,计算节点i与其邻居节点j之间的注意力分数,使用公式:
15、eij=leakyrelu(at[w1hi||w2hi])
16、其中,eij表示节点i与节点j之间的注意力分数,leakyrelu是激活函数,a是可学习的参数向量,w1和w2是可学习的权重矩阵,||表示向量拼接操作。
17、转化路段之间的重要性程度,通过应用函数softmax将注意力分数转化为注意力权重,以确保它们的总和等于1:
18、
19、其中,ni表示节点i的邻居节点集合。
20、聚合相邻路段节点信息:
21、
22、其中,zi表示节点i的更新表示,w是可学习的权重矩阵,σ为激活函数。上述过程可以描述为对每个节点i,通过考虑其邻居节点的特征和注意力分数,生成一个新的表示zi,以便更好地捕捉节点在图中的上下文信息。
23、所构建构建基于图卷积网络和扩展卷积网络的时空网络模块包括以下步骤:
24、构建空间卷积层:
25、使用拉普拉斯矩阵来描述图结构,然后借助于图拉普拉斯矩阵的特征值和特征向量来研究图的性质,其计算公式为:
26、gθ*x=ugθ(λ)utx,
27、其中,gθ=diag(θ)为过滤器,将其与输入数据x的乘积定义为图卷积,为图的拉普拉斯矩阵,λ为特征向量对应特征值的对角矩阵,u为归一化的图拉普拉斯矩阵l的特征向量矩阵,a为图的邻接矩阵,d为图的度矩阵,n为图中顶点的个数。
28、转化为切夫雪比图卷积来降低计算的计算复杂度,切夫雪比图卷积通过使用切比雪夫多项式来近似图卷积核的特征分解,只需要考虑其k阶近邻的信息,从而降低拉普拉斯矩阵特征值分别的计算的成本,其计算公式为:
29、
30、其中,λmax表示拉普拉斯矩阵l中最大的特征值,in是单位矩阵。tk(x)=2xtk-1(x)-tk-2(x),tk(x)为切比雪夫多项式,且t0(x)=1,t1(x)=x,θ是切比雪夫项的系数,k为切比雪夫多项式的阶数。
31、通过一阶近似图卷积对切比雪夫图卷积进行优化,将其从k阶简化成1阶近似,并令λmax=2,从而将上公式简化为:
32、
33、通过重整化技巧进行处理,来解决进行多层计算时,可能会使数值性能不稳定及可能会产生的梯度消失或爆炸的问题。然后,获得过滤器θ和输入信号x之间的图卷积操作,公式为:
34、
35、其中,θ为卷积核的参数。
36、构建时间卷积层:
37、时间卷积层中是带有σ和tanh激活函数的两个扩展卷积,并对其输出进行连接,用来提取时间特征。扩展因果卷积通过设置扩展因子来跳过某一步的值在输入上滑动。一般情况下,扩张卷积的感受野大小遵循公式:
38、k=(d*(k-1)=1)
39、其中,k代表扩张后的感受野大小,d代表扩张因子,k代表原始卷积核大小。
40、所述城市道路交通事故预测结果的获得包括以下步骤:
41、根据城市道路空间几何数据、路段周围重要建筑物数据、历史事故数据作为输入,经过动态图注意力模块的处理,被转化为影响交通事故的动态图;
42、时空卷积模块由图卷积层连接两个时间卷积层组成。通过在时空卷积层分别降低和升高特征维度,以减少参数的数量。时间卷积层中是带有不同激活函数的两个扩展卷积,并对其输出进行连接,用来提取时间特征;图卷积层通过对通道进行尺度的升降,实现尺度压缩和特征压缩,利用交通网络的拓扑性质提取空间特征;
43、处理天气数据等外部数据时使用了全连接网络。并且模型采用残差学习框架,用于缓解网络收敛速度慢的问题。三个层的结果进行特征融合后经过最后的全连接层实现输出最终预测数据。
44、有益效果
45、本发明采用以上技术方案与现有技术相比,具有以下有益效果及优点:
46、目前大部分研究都局限于提取邻近节点的空间信息,而不同空间位置节点的重要性不能仅仅通过空间的邻近来区分,因此没有充分考虑到不同空间位置节点的重要性。本发明提出了一种新的动态图注意力时空网络用于交通事故预测。通过引入动态注意力机制来动态调整不同空间位置节点的重要性,并且时空模块能够更好地捕捉道路交通事故数据的时空相关性。进一步提高预测精度。
- 还没有人留言评论。精彩留言会获得点赞!