一种对城市无人机可自由运行空域有效划分的方法与流程
本发明涉及可自由运行空域有效划分领域,特别是一种对城市无人机可自由运行空域有效划分的方法。
背景技术:
1、现有城市空域划设方法主要基于以城市道路为基础的航路规划、结合城市基础设施的航路规划两类思路提出了多种方法来对城市无人可运行空域进行划设,并通过分层空域、扇形空域以及管道空域三种空域结构对城市无人机运行空域进行进一步的设置,但是这些方法存在以下几个问题:
2、1.划设空域总体积较小,现有方法思路更多的是参照现有地面交通的运行方式,利用路网信息划设无人机的运行空域,或者从应用场景出发,结合城市基础建设进行划设,这些方法总体而言并没有完全从二维交通视角拓展到应有的三维交通视角,整体空域划设的总体积远远小于理论极限;
3、2.无人机运行空域容量较低,现有方法沿用民航领域航线航路点的设置思路,为中小型无人机在城市中的运行设置了三种空域结构,这三类空域结构限制了无人机在划设好空域中同时运行的理论极限数量较小,即空域容量较低。
4、3.以上几种方法只能固定划设空域,无法根据无人机自身型号动态变化划设空域,为了保证安全,所划设空域只能按照目前已有最大允许进入城市的无人机进行划设,进一步的降低了整体空域容量。
5、城市空域划设是无人机在城市中有效、可靠、高效运行的先决条件,现阶段对城市空域未有有效的划分,无人机在城市空域的运行采用报备制,即临时设置限制空域供某一次任务的飞行,而学界对城市空域的划设研究陷入了以以往大型、高速的民航以及传统二维城市交通为基础的研究方法,不能将城市中无人机可用空域有效的进行划设,浪费了大量的空域资源;同时,在现阶段方法中,为了保证安全,所划设空域全部针对可允许进入城市空域的最大型号无人机来进行参数设置,即又二次浪费了大量的空域资源,导致最终总的空域容量远远小于应有的理论极限。
6、本发明针对以上问题,提出了一种基于可变alpha-shape算法的城市空域拓扑算法,对城市无人机可用空域进行三维重建,将alpha-shape算法中的核心参数alpha与无人机型号对应起来,快速的生成对应型号无人机在城市中的全部可用空域,同时对alpha-shape算法进行改进,大大提高大范围城市可用空域构建的速度。
技术实现思路
1、为解决现有技术中存在的问题,本发明提供了一种对城市无人机可自由运行空域有效划分的方法,解决了现有技术中不能将城市中无人机可用空域有效的进行划设的痛点,浪费了大量的空域资源;同时,在现阶段方法中,为了保证安全,所划设空域全部针对可允许进入城市空域的最大型号无人机来进行参数设置,即又二次浪费了大量的空域资源,导致最终总的空域容量远远小于应有的理论极限的问题。
2、本发明的技术方案如下:
3、一种对城市无人机可自由运行空域有效划分的方法,包括以下步骤:
4、步骤s1:使用无人机搭载多台传感器使用无人机倾斜摄影技术采集城市静态障碍物外立面轮廓点云信息;
5、步骤s2:对城市静态障碍物外立面轮廓点云信息进行过滤,使得点云密度进一步降低;
6、步骤s3:由于无人机在城市建筑中运行未来发展趋势为分层空域后自由航行,故在计算时分层计算,按照固定高度选取不同的高度层,将城市静态障碍物外立面轮廓点云信息按照高度层进一步进行过滤,得到点云数据;
7、步骤s4:设置参数alpha,设置
8、其中,r代表无人机半径,δ代表无人机与城市静态障碍物的一个膨胀保护区域的距离;
9、步骤s5:使用可变半径alpha-shape算法对处理好的点云数据进行重新拓扑构建,得到城市轮廓;
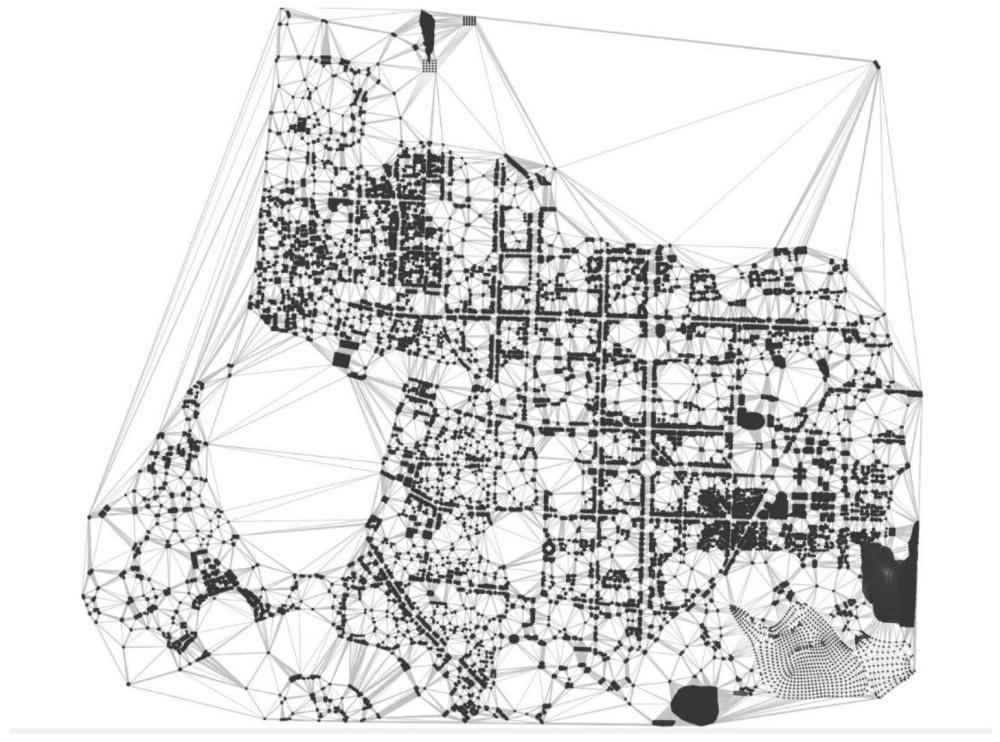
10、步骤s6:对得到的城市轮廓取补集,并对补集进行delaunay三角剖分,得到一个型号无人机的一个高度层的全部可用空域。
11、优选地,步骤s4包括以下子步骤:
12、子步骤s41:无人机需要与包含地形以及建筑物会对无人机造成毁灭性伤害的人造自然结构保持规定的距离δ;
13、子步骤s42:规定的距离δ为在人造自然结构周围创造了一个缓冲空间,用以保障在定位精度不理想的情况下的阈度。
14、优选地,步骤s6的空域为固定高度的垂直对叠层,每一层所述空域的高度恒定,一层所述空域的结构为一个确定高度的二维拓扑结构的垂直向上拉伸。
15、本发明对城市无人机可自由运行空域有效划分的方法的有益效果如下:
16、1.本发明为中小型无人机进入城市空域运行提供了必不可少的技术支持。
17、2.本发明与现有方法相比,寻找到了无人机可用空域的理论极限,大大提高了无人机在城市中运行的空域容量。
18、3.本发明动态的生成不同型号无人机的可用空域,大大提高了空域容量。
技术特征:
1.一种对城市无人机可自由运行空域有效划分的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的对城市无人机可自由运行空域有效划分的方法,其特征在于,所述步骤s4包括以下子步骤:
3.根据权利要求1所述的对城市无人机可自由运行空域有效划分的方法,其特征在于,所述步骤s6的空域为固定高度的垂直对叠层,每一层所述空域的高度恒定,一层所述空域的结构为一个确定高度的二维拓扑结构的垂直向上拉伸。
技术总结
本发明公开了一种对城市无人机可自由运行空域有效划分的方法,包括以下步骤:步骤S1:使用无人机搭载多台传感器使用无人机倾斜摄影技术采集城市静态障碍物外立面轮廓点云信息;步骤S2:对城市静态障碍物外立面轮廓点云信息进行过滤,使得点云密度进一步降低;解决了现有技术中不能将城市中无人机可用空域有效的进行划设的痛点,浪费了大量的空域资源;同时,在现阶段方法中,为了保证安全,所划设空域全部针对可允许进入城市空域的最大型号无人机来进行参数设置,即又二次浪费了大量的空域资源,导致最终总的空域容量远远小于应有的理论极限的问题。
技术研发人员:张学军,陈思道,张维东
受保护的技术使用者:成都福瑞空天科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!