运行管理方法、装置、终端设备以及存储介质与流程
本发明涉及飞行器,尤其涉及一种运行管理方法、装置、终端设备以及存储介质。
背景技术:
1、随着低空空域的开放,同一空域内运行的飞行器越来越多。低空空域飞行环境复杂,目前主要针对低空空域中的无人机制定了一系列运行管理办法,主要依赖实名登记和无人机上传飞行状态信息,此类无人机大多在隔离空域飞行,安全性影响没有低空载人飞行器高,因此其运行管理方法不适合低空载人飞行器。
2、由于载人飞行器安全性要求高,单纯利用机载传感器如相机、雷达等进行感知避障难以满足要求。同一空域内多个载人飞行器飞行,气流影响、信号干扰等都会带来相互之间的影响,容易造成碰撞等安全问题。
3、因此,有必要提出一种合理控制各个低空载人飞行器的运行路径的解决方案,以确保各低空载人飞行器的飞行安全。
4、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种运行管理方法、装置、终端设备以及存储介质,旨在提出一种合理控制各个低空载人飞行器的运行路径的方法,以确保各低空载人飞行器的飞行安全。
2、为实现上述目的,本发明提供一种运行管理方法,所述运行管理方法包括:
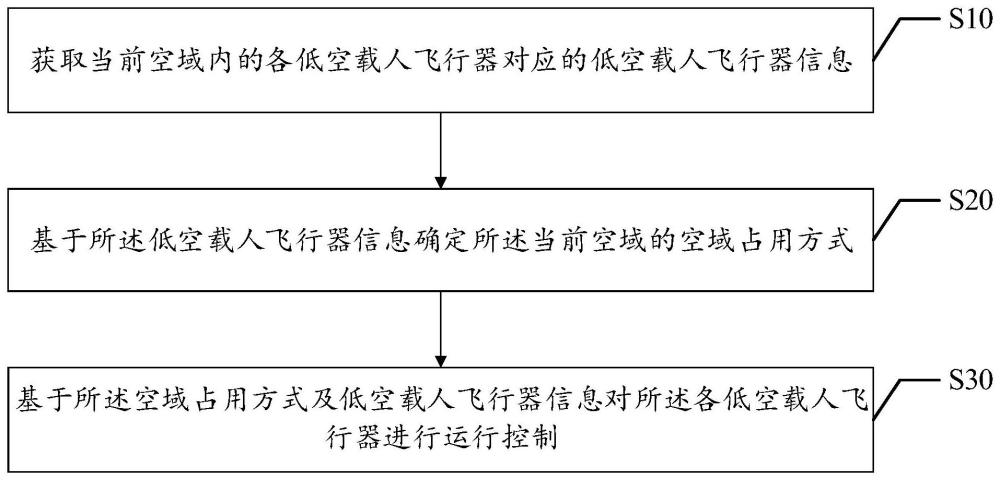
3、获取当前空域内的各低空载人飞行器对应的低空载人飞行器信息;
4、基于所述低空载人飞行器信息确定所述当前空域的空域占用方式;
5、基于所述空域占用方式及低空载人飞行器信息对所述各低空载人飞行器进行运行控制。
6、可选地,所述低空载人飞行器信息包括飞行任务包线,所述基于所述低空载人飞行器信息确定所述当前空域的空域占用方式的步骤包括:
7、将所述各低空载人飞行器对应的飞行任务包线按照时间和空间展开为若干片段,其中,所述若干片段包括各个时间片段及对应的飞行空间包线;
8、对所述各个时间片段内的飞行空间包线进行干涉检测,得到干涉检测结果;
9、根据所述干涉检测结果确定所述当前空域的空域占用方式。
10、可选地,所述根据所述干涉检测结果确定所述当前空域的空域占用方式的步骤包括以下至少一项:
11、根据所述干涉检测结果确定所述空域占用方式为分时占用,包括选取或确定所述各低空载人飞行器在所述当前空域中运行的时间段;
12、根据所述干涉检测结果确定所述空域占用方式为分区占用,包括选取或确定所述各低空载人飞行器在所述当前空域中运行的各子空间区域;
13、根据所述干涉检测结果确定所述空域占用方式为分层占用,包括选取或确定所述各低空载人飞行器在所述当前空域中运行的各高度层;
14、根据所述干涉检测结果确定所述空域占用方式为组合占用,包括选取或确定所述各低空载人飞行器在所述当前空域中运行的各子空间区域、高度层及时间段。
15、可选地,所述基于所述空域占用方式及低空载人飞行器信息对所述各低空载人飞行器进行运行控制的步骤包括:
16、根据所述空域占用方式分别确定所述各低空载人飞行器是否需要在当前空域中跨高度层运行和/或跨空间运行;
17、若所述各低空载人飞行器需要在当前空域中跨高度层运行和/或跨空间运行,则结合所述低空载人飞行器信息对所述各低空载人飞行器进行运行控制。
18、可选地,所述若所述各低空载人飞行器需要在当前空域中跨高度层运行,则结合所述低空载人飞行器信息对所述各低空载人飞行器进行运行控制的步骤包括:
19、在所述当前空域中选取或确定高度调整区域,以及,根据所述低空载人飞行器信息确定所述各低空载人飞行器所在的当前高度层;
20、控制所述各低空载人飞行器以第一航向角和/或第一航迹角从所述当前高度层运行至所述高度调整区域,并在所述高度调整区域中运行到目标高度层;
21、控制所述各低空载人飞行器在所述目标高度层中以所述目标高度层限制的第二航向角和/或第二航迹角运行。
22、可选地,所述若所述各低空载人飞行器需要在当前空域中跨空间运行,则结合所述低空载人飞行器信息对所述各低空载人飞行器进行运行控制的步骤包括:
23、根据所述低空载人飞行器信息确定所述各低空载人飞行器在当前空域中的所在的当前飞行子空间及目标飞行子空间;
24、建立所述当前飞行子空间到所述目标飞行子空间的拓扑连接关系;
25、根据所述拓扑连接关系进行运行路径规划,确定跨空间路径;
26、获取所述跨空间路径中的途径子空间对应的飞行高度层;
27、控制所述各低空载人飞行器在飞行至所述途径子空间时调整飞行高度到对应的飞行高度层。
28、可选地,所述根据所述拓扑连接关系进行运行路径规划,确定跨空间路径的步骤包括:
29、根据所述拓扑连接关系确定各路径跨越的子空间数目和/或飞行航程;
30、设置所述各路径跨越的子空间数目和/或飞行航程对应的加权权重;
31、根据所述各路径跨越的子空间数目和/或飞行航程及对应的加权权重,计算所述各路径的目标值;
32、从所述各路径的目标值中选取最小的目标值,将最小的目标值对应的路径作为所述跨空间路径。
33、此外,为实现上述目的,本发明还提供一种运行管理装置,所述运行管理装置包括:
34、获取模块,用于获取当前空域内的各低空载人飞行器对应的低空载人飞行器信息;
35、确定模块,用于基于所述低空载人飞行器信息确定所述当前空域的空域占用方式;
36、控制模块,用于基于所述空域占用方式及低空载人飞行器信息对所述各低空载人飞行器进行运行控制。
37、此外,为实现上述目的,本发明还提供一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的运行管理程序,所述运行管理程序被所述处理器执行时实现如上所述的运行管理方法的步骤。
38、此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有运行管理程序,所述运行管理程序被处理器执行时实现如上所述的运行管理方法的步骤。
39、本发明实施例提出的一种运行管理方法、装置、终端设备以及存储介质,通过获取当前空域内的各低空载人飞行器对应的低空载人飞行器信息;基于所述低空载人飞行器信息确定所述当前空域的空域占用方式;基于所述空域占用方式及低空载人飞行器信息对所述各低空载人飞行器进行运行控制,通过各低空载人飞行器对应的低空载人飞行器信息确定当前空域的空域占用方式,进而根据空域占用方式及低空载人飞行器信息对各低空载人飞行器进行运行控制,实现了在当前空域内规划多个低空载人飞行器的运行,合理控制各个低空载人飞行器的运行路径,可以提高当前空域的利用率,并提升多个低空载人飞行器同时运行的安全性。
技术特征:
1.一种运行管理方法,其特征在于,所述运行管理方法包括以下步骤:
2.如权利要求1所述的运行管理方法,其特征在于,所述低空载人飞行器信息包括飞行任务包线,所述基于所述低空载人飞行器信息确定所述当前空域的空域占用方式的步骤包括:
3.如权利要求2所述的运行管理方法,其特征在于,所述根据所述干涉检测结果确定所述当前空域的空域占用方式的步骤包括以下至少一项:
4.如权利要求1所述的运行管理方法,其特征在于,所述基于所述空域占用方式及低空载人飞行器信息对所述各低空载人飞行器进行运行控制的步骤包括:
5.如权利要求4所述的运行管理方法,其特征在于,所述若所述各低空载人飞行器需要在当前空域中跨高度层运行,则结合所述低空载人飞行器信息对所述各低空载人飞行器进行运行控制的步骤包括:
6.如权利要求4所述的运行管理方法,其特征在于,所述若所述各低空载人飞行器需要在当前空域中跨空间运行,则结合所述低空载人飞行器信息对所述各低空载人飞行器进行运行控制的步骤包括:
7.如权利要求6所述的运行管理方法,其特征在于,所述根据所述拓扑连接关系进行运行路径规划,确定跨空间路径的步骤包括:
8.一种运行管理装置,其特征在于,所述运行管理装置包括:
9.一种终端设备,其特征在于,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的运行管理程序,所述运行管理程序被所述处理器执行时实现如权利要求1-7中任一项所述的运行管理方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有运行管理程序,所述运行管理程序被处理器执行时实现如权利要求1-7中任一项所述的运行管理方法的步骤。
技术总结
本发明公开了一种运行管理方法、装置、终端设备以及存储介质,通过获取当前空域内的各低空载人飞行器对应的低空载人飞行器信息;基于所述低空载人飞行器信息确定所述当前空域的空域占用方式;基于所述空域占用方式及低空载人飞行器信息对所述各低空载人飞行器进行运行控制,通过各低空载人飞行器对应的低空载人飞行器信息确定当前空域的空域占用方式,进而根据空域占用方式及低空载人飞行器信息对各低空载人飞行器进行运行控制,实现了在当前空域内规划多个低空载人飞行器的运行,合理控制各个低空载人飞行器的运行路径,可以提高当前空域的利用率,并提升多个低空载人飞行器同时运行的安全性。
技术研发人员:陶永康,张均,张明明
受保护的技术使用者:广东汇天航空航天科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!