一种基于浮动车虚拟轨迹点的路段平均车速计算方法与流程
本发明涉及智能交通信息采集领域,具体为一种基于浮动车虚拟轨迹点的路段平均车速计算方法。
背景技术:
1、在现有的交通管理中,对道路交通状态的监控和评估通常依赖于固定的交通传感器和摄像头,这些设备可以检测道路的占用率、车流量、车速等传统的路况信息。然而,这些方法存在一些问题和缺点,首先,固定的交通传感器和摄像头需要大量的基础设施投资,并且需要定期维护和升级,其次,这些设备可能无法覆盖所有的道路和交通节点,导致路况信息的缺失和不准确。
2、随着通讯技术和车辆卫星导航系统的快速发展,基于车载卫星定位数据(浮动车数据)的道路交通信息采集技术得到了广泛应用。基于浮动车的交通信息采集系统主要由车载设备、无线通信网络和交通信息中心等组成,车载设备主要包括卫星模块、无线通信模块等,卫星模块接收卫星定位信号并运算出车辆的坐标和瞬时速度,无线通信模块负责将车辆坐标、速度等数据传送到交通信息中心。交通信息中心对车载设备上传的数据进行存储、预处理,结合地图利用相应的计算模型对交通参数如速度、行程时间等进行估计和预测,从而得到整个道路网的实时动态交通信息。
3、然而目前大部分的基于浮动车数据的交通数据采集系统,其中的路段平均车速计算时,在样本生成、样本筛选等环节上,存在一定的技术缺陷,比如用于计算路段的样本点并不完全匹配相应路段,可能车速样本过多的引入了其他路段的车速信息或者只包含了该路段部分的车速信息;另外样本中往往包含了交叉口红灯延误的时间,使得计算车速样本偏差比较大,车速精度大大降低。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于浮动车虚拟轨迹点的路段平均车速计算方法。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:本发明的一种基于浮动车虚拟轨迹点的路段平均车速计算方法,包括以下步骤:
5、a.当装载有卫星定位设备的车辆沿道路行驶时,卫星装置以一定的时间间隔连续记录时间、车辆的位置和瞬时速度等;将定位装置获得的车辆定位数据与电子地图数据库中的道路路段匹配起来,并由此确定车辆相对于道路的具体位置。
6、b.应用虚拟轨迹点(vn)算法在车辆运动轨迹图中运算出车辆经过路段两端交叉口点的时间戳;依据行程时间和车辆位置信息,推算出节点距离上游卫星定位点的距离与节点距离下游卫星定位点的距离之比,等于节点距离上游卫星定位点时间差与节点距离下游卫星定位点时间差之比;
7、c.通过虚拟轨迹点时间戳计算车辆通过该路段的行程时间;
8、d.根据以上推算结果,对每个车辆样本经过的每条路段,使用如上的算法估计出路段link的起点与终点时间戳;
9、e.结合路段长度,可以得到单个样本经过路段的行程时间与行程速度;
10、f.设定时间小窗和时间大窗,在计算路段车速时,所采用的两两卫星轨迹点采样地必须有一点在时间小窗内(比如2分钟),两点都必须在时间大窗内(比如5分钟);
11、g.在某个采样周期内,对于某条路段,按照采用时间窗方法进行样本筛选,样本用于计算路段的虚拟轨迹点tnode时间戳的后一卫星定位点时间戳(即路段下游node点后第一个卫星定位点的时间戳)落在采样小窗时间范围内,所有的卫星定位点都要落在采样大窗时间范围内;样本经过路段的行程车速大于等于阈值(最低车速阈值),小于等于路段的最高限速max_speed;
12、h.将满足条件的样本平均后,即得到当前采样周期内路段的平均行程车速。
13、优选的,所述vn算法中对link节点时间戳的计算方法如下:
14、若一辆车在link2下游node3点(该node点可能为地面道路交叉口也可能为高架快速路上的人为路段link分段点)两侧的卫星定位点2与点3间没有受延误影响(地面道路上,该影响可能为link2下游交叉口延误,也可能为link3下游交叉口延误;高架快速路上,该影响可能为link2下游合分流点造成的延误,也可能为link3下游合分流点造成的延误),则使用卫星定位点2与点3来估计车辆经过node点的时间戳,即:
15、
16、因此:
17、
18、进一步优选的,若一辆车在link2下游node点两侧的卫星定位点2与点3间受到了延误影响,此时判断延误是发生在那一侧。如果判断延误发生在卫星定位点2至路段交叉口一侧(即la一侧),并且能够判断出路段交叉口至卫星定位点3一侧没有受到延误影响,并且卫星定位点3至卫星定位点4之间也没有受到延误影响,则可以利用卫星定位点3与卫星定位点4来估计车辆经过node3的时间戳,即:
19、
20、因此:
21、
22、再次优选的,如果判断延误发生在路段交叉口至卫星定位点3一侧(即lb一侧),并且能够判断出卫星定位点2至路段交叉口一侧没有受到延误影响,并且卫星定位点1至卫星定位点2之间也没有受到延误影响,则可以利用卫星定位点1与卫星定位点2来估计车辆经过node3的时间戳,即:
23、
24、因此:
25、
26、优选的,所述时间小窗指的是用于计算路段车速采用的两两gps采样点时间戳的后点必须落在时间小窗范围内,所述时间大窗指的是用于计算路段车速采用的两两gps采样点所有时间戳必须都落在时间大窗范围内。
27、进一步优选的,所述的路段行程车速计算方法包括以下步骤:
28、(a)对每个车辆样本经过的每条路段,使用如上的算法估计出link的起点与终点时间戳;
29、(b)结合路段长度,得到单个样本经过路段的行程时间与行程速度;
30、(c)将满足条件的样本平均后,得到当前采样周期内路段的平均行程车速。
31、优选的,具体包括以下步骤;
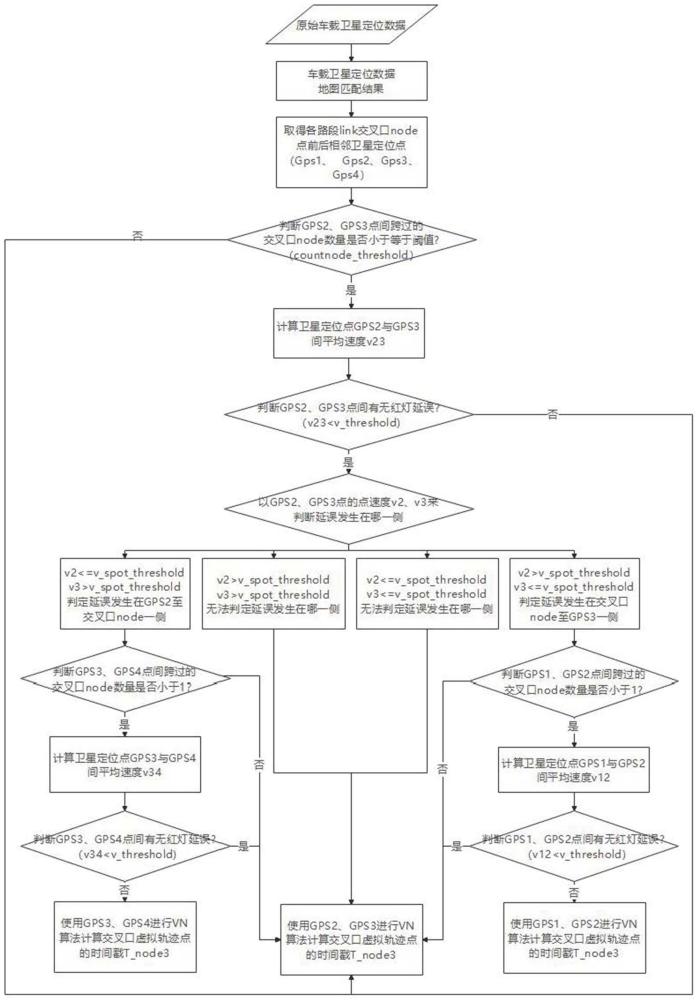
32、步骤1:基于地图匹配结果,取得单辆车对应某个路段交叉口节点前后相邻四个卫星定位点1、2、3、4;
33、步骤2:判断卫星定位点2与点3间跨过的交叉口数量(即路段交叉口数量)是否小于等于阈值(countnode_threshold,暂定为1),若卫星定位点2与点3间跨过的交叉口数量超过countnode_threshold,则只能使用点2与点3进行节点时间戳估计,转入步骤19;若卫星定位点2与点3间跨过的交叉口数量小于等于countnode_threshold,则转入步骤3;
34、步骤3:判断卫星定位点2与点3间是否受到信号灯延误影响,计算卫星定位点2、3间行程速度;
35、步骤4:判断是否小于等于速度阈值(可设定为10km/h),如果是,则转入步骤6;如果否,则转入步骤5。
36、步骤5:卫星定位点2与点3间行程速度大于阈值,认为点2与点3间没有受到延误影响,直接使用2、3点计算车辆经过路段交叉口节点时间戳,算法结束;
37、步骤6:卫星定位点2与点3间行程速度小于等于阈值,认为点2与点3间受到了延误影响,此时需要判断该延误发生路段交叉口节点的哪一侧;
38、步骤7:认为卫星定位点2、3间的延误发生在路段交叉口节点前,路段交叉口节点至卫星定位点3间未发生延误,因此可以考虑使用卫星定位点3、4推算路段交叉口节点时间戳,转入步骤8。
39、步骤8:判断卫星定位点3与点4间跨过的交叉口数量(即路段交叉口数量)是否小于1,目前阶段认为,若点3与点4不在同一条路段上(即countnode_34>0),则无法使用点3、4推算路段交叉口节点时间戳,转入步骤19;若点3与点4在同一条路段上(即countnode_34<1),则转入步骤9;
40、步骤9:判断卫星定位点3、4之间是否受到延误影响,计算卫星定位点3、4点间行程车速,转入步骤10;
41、步骤10:判断是否小于等于速度阈值(可设定为10km/h),如果是,则转入步骤11;如果否,则转入步骤12;
42、步骤11:小于等于速度阈值,认为点3与点4间受到延误影响,无法使用点3、4推算路段交叉口节点时间戳,转入步骤19;
43、步骤12:大于速度阈值,认为点3与点4间没有受到延误影响,可以使用点3、4推算路段交叉口节点时间戳,算法结束;
44、步骤13:认为卫星定位点2、3间的延误发生在路段交叉口节点后,卫星定位点2至路段交叉口节点间未发生延误,因此可以考虑使用卫星定位点1、2推算路段交叉口节点时间戳,转入步骤14;
45、步骤14:判断卫星定位点1与点2间跨过的交叉口数量是否小于1,目前阶段认为,若点1与点2不在同一条路段上(即countnode_12>0),则无法使用点1、2推算路段交叉口节点时间戳,转入步骤19;若点1与点2在同一条路段上(即countnode_12<1),则转入步骤15;
46、步骤15:判断卫星定位点1、2之间是否受到延误影响,计算卫星定位点1、2点间行程车速,转入步骤16;
47、步骤16:判断是否小于等于速度阈值(可设定为10km/h),如果是,则转入步骤17;如果否,则转入步骤18;
48、步骤17:小于等于速度阈值,认为点1与点2间受到延误影响,无法使用点1、2推算路段交叉口节点时间戳,转入步骤19;
49、步骤18:大于速度阈值,认为点1与点2间没有受到延误影响,可以使用点1、2推算路段交叉口节点时间戳,算法结束。
50、步骤19:使用2、3点计算车辆经过路段交叉口节点时间戳,算法结束。
51、进一步优选的,所述步骤6中的算法使用卫星定位点2、3的点速度值进行辅助判断,分以下四种情况:
52、1.卫星定位点2的点速度小于等于点速度阈值(可设定为10km/h),卫星定位点3的点速度大于速度阈值,则认为延误发生在路段交叉口节点前(la处),转入所述步骤7;
53、2.卫星定位点2的点速度大于速度阈值,卫星定位点3的点速度小于等于速度阈值,则认为延误发生在路段交叉口节点后(lb处),转入所述步骤13;
54、3.卫星定位点2、3的点速度都大于速度阈值,则无法判断延误发生在路段交叉口节点哪一侧,转入所述步骤19;
55、4.卫星定位点2、3的点速度都小于等于速度阈值,则无法判断延误发生在路段交叉口节点哪一侧,转入步骤19。
56、(三)有益效果
57、与现有技术相比,本发明提供了一种基于浮动车虚拟轨迹点的路段平均车速计算方法,具备以下有益效果:
58、本发明基于虚拟轨迹点vn算法,解决了在基于浮动车数据计算路段平均行驶速度等参数的时候过多的引入了其他路段的速度信息或者只包含了部分的路段速度信息,并一定程度上排除了交叉口延误的影响,提高了路段车速计算的采样准确性和车速估计精度。
- 还没有人留言评论。精彩留言会获得点赞!