基于无人机库的交通事故处理方法与流程
本发明属于基于无人机应用交通,具体涉及基于无人机库的交通事故处理方法。
背景技术:
1、交通事故处理需要全面的事故现场图片,相比于人工手动拍摄并绘图标注,无人机可以通过航拍进行拍摄,并实时回传方便编辑保存。利用无人机技术对交通事故现场进行航拍、数据采集、分析和处理,以实现更高效、准确的事故处理。使用无人机拍摄交通事故现场具有多种便利,如提高数据采集的效率和全面性、方便对复杂的环境勘察拍摄、数据回传与保存。
2、目前,无人机应用已经得到广泛应用,但主要集中在军事、航拍等领域,而在交通事故处理等民用领域的应用还比较有限,并且仍然存在一些问题。首先,人工操作无人机需要耗费大量的人力成本,因为需要有人工到达事故现场附近才能使用无人机,无法保证及时响应。其次,手动航拍需要拍摄人员具备一定的拍摄技术要求,拍摄时长也难以控制。此外,缺乏ai技术的支持及精准图元,手动操作绘图和精准性可能存在问题。针对拍摄成果的回传,数据安全和可靠性也是需要考虑的问题。在传输过程中,需要采取加密措施确保数据的安全性,防止数据被非法获取和利用。同时,也需要对传输数据进行质量评估和校验,确保数据的准确性和可靠性。
技术实现思路
1、本发明的目的在于提供基于无人机库的交通事故处理方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:基于无人机库的交通事故处理方法,包括以下步骤:
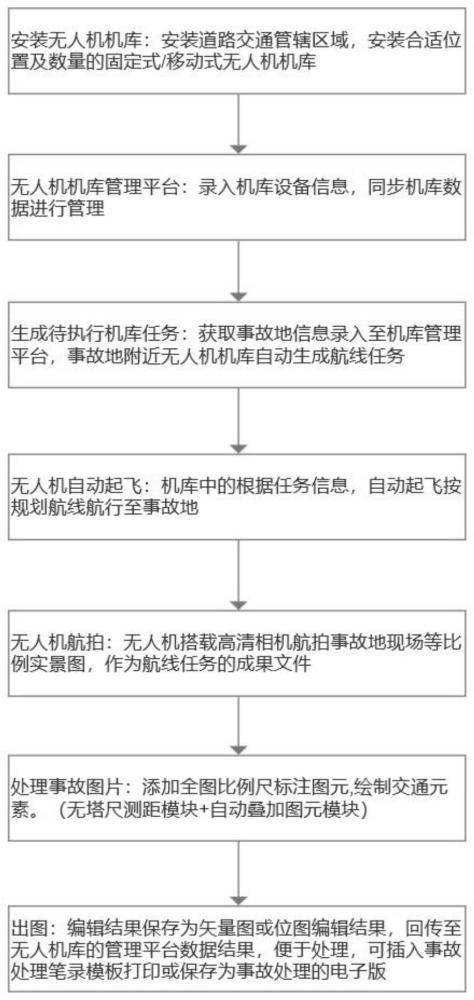
3、s1:在交通规划范围内安装预设数量的无人机库;
4、s2:录入机库的设备信息,同步机库数据进行管理,通过无人机机库管理平台对无人机进行远程监控、调度和任务分配;
5、s3:当某地发生交通事故后,无人机库管理平台中通过第三方接口获取该事故地点,或在平台手动录入该事故地点,自动生成对应的航线任务;
6、s4:事故地附近的无人机机库装置通过无线通信网络获取待执行任务信息,机库中的无人机自动起飞,飞行至事故地点位置执行拍摄任务;
7、s5:当无人机到达事故地点附近后,通过搭载的高清相机等设备拍摄事故地环境图片,形成本次道路勘察的成果文件,将拍摄的图片通过无线通信网络上传至云端服务器,保存在云端数据库中;
8、s6:机库所执行航线拍摄的任务成果,自动生成图片处理任务,通过该机库匹配过的平板端获取编辑;
9、s7:在平板设备的事故勘察处理系统中,可领取该平板设备匹配的机库执行的任务成果,进行符合事故勘察处理规范的编辑操作,还原事故现场的信息,通过无塔尺测距模块添加全图比例尺,表示事故现场的距离,通过自动叠加图元模块标注图元,绘制交通元素;
10、s8:将编辑结果回传至无人机库的管理平台数据结果,插入事故处理笔录模板打印或保存为事故处理的电子版,完成事故处理流程。
11、优选地,所述无人机库包括固定式无人机库或移动式无人机库。
12、优选地,所述任务信息包括事故地点、航行路线、拍摄要求。
13、优选地,所述编辑结果包括矢量图编辑结果或位图编辑结果。
14、优选地,所述自动叠加图元模块包括离线模块和在线模块。
15、优选地,所述离线模块的工作流程包括如下步骤:
16、a1:首先通过无人机航拍收集车辆数据;
17、a2:然后对数据进行标注,训练得到车辆检测模型、车头检测模型和车辆分割模型。
18、优选地,所述在线模块的工作流程包括如下步骤:
19、b1:首先进行车辆检测,获取车辆的矩形框;
20、b2:然后对矩形框按照固定比例在图像上进行区域扩大;
21、b3:并对扩大后的车辆区域进行车辆分割和车头检测,提取完整的车辆轮廓,以车头在车辆矩形框中的位置来确定车辆的方向,以轮廓的最小外接矩形作为图元叠加的位置。
22、优选地,所述无塔尺测距模块包括图像关键点检测单元、图像特征匹配单元和图像中像素和真实三维空间平面的长度换算单元;
23、所述图像特征匹配单元用于通过比较不同图像之间的描述子,计算描述子之间的距离来衡量图像区域的相似程度,从而识别图像中的相同区域。
24、优选地,所述图像关键点检测单元的的工作流程包括如下步骤:
25、c1:首先利用无人机在事故现场拍摄两幅正射图像,两幅图像拍摄高度相同、拍摄姿态相同,且有重合区域;
26、c2:通过特征检测算法对这两幅图像进行灰度化和降噪等预处理,然后在不同的尺度空间上查找关键点,关键点对应于图像中的局部极值点;
27、c3:最后在每个特征点的邻域内计算图像局部的梯度,利用描述子来描述特征点的周围区域。
28、优选地,所述图像中像素和真实三维空间平面的长度换算单元的工作流程包括如下步骤:
29、d1:首先根据两幅图像中特征匹配成功的关键点来计算关键点移动的平均像素距离,即图像中的关键点在无人机移动后再拍摄时,该关键点在图像中移动的像素数量;
30、d2:再根据两幅图像的地理坐标信息计算无人机拍摄这两幅图像时实际移动的物理距离;
31、d3:最后根据像素移动数量与实际移动的物理距离得到图像中像素和真实空间的长度换算关系,对于图像中的待测目标,统计其像素长度,再根据换算关系得到其实际尺寸。
32、与现有技术相比,本发明的有益效果是:
33、本发明提供的方法可以避免传统勘查方式需要接触事故现场的人员风险,特别是在事故现场存在危险因素的情况下,无人机库的自动拍摄流程可以更加安全地完成勘察任务,无需人员到达现场进行勘查,并且无人机可以进行全方位、多角度的拍摄,可以获取到事故现场的全景图像,为后续的事故分析、责任认定和解决方案提供更加准确和全面的数据支持,无人机及时完成事故现场拍摄后可以立即传输图像和数据,使得相关人员可以迅速了解事故现场的情况,为后续的决策提供更加准确和及时的数据支持,使用无人机机库进行远程交通事故处理可以节省人力和物力资源,降低处理成本,可以减少对现场勘查人员、无人机飞手的依赖,减少人力资源的浪费,适应性强、可移动性高,可以在不同的环境下进行勘察和拍摄。
技术特征:
1.基于无人机库的交通事故处理方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于无人机库的交通事故处理方法,其特征在于:所述无人机库包括固定式无人机库或移动式无人机库。
3.根据权利要求1所述的基于无人机库的交通事故处理方法,其特征在于:所述任务信息包括事故地点、航行路线、拍摄要求。
4.根据权利要求1所述的基于无人机库的交通事故处理方法,其特征在于:所述编辑结果包括矢量图编辑结果或位图编辑结果。
5.根据权利要求1所述的基于无人机库的交通事故处理方法,其特征在于:所述自动叠加图元模块包括离线模块和在线模块。
6.根据权利要求5所述的基于无人机库的交通事故处理方法,其特征在于:所述离线模块的工作流程包括如下步骤:
7.根据权利要求5所述的基于无人机库的交通事故处理方法,其特征在于:所述在线模块的工作流程包括如下步骤:
8.根据权利要求1所述的基于无人机库的交通事故处理方法,其特征在于:所述无塔尺测距模块包括图像关键点检测单元、图像特征匹配单元和图像中像素和真实三维空间平面的长度换算单元;
9.根据权利要求8所述的基于无人机库的交通事故处理方法,其特征在于:所述图像关键点检测单元的的工作流程包括如下步骤:
10.根据权利要求8所述的基于无人机库的交通事故处理方法,其特征在于:所述图像中像素和真实三维空间平面的长度换算单元的工作流程包括如下步骤:
技术总结
本发明属于基于无人机应用交通技术领域,本发明公开了基于无人机库的交通事故处理方法,包括以下步骤:在交通规划范围内安装预设数量的无人机库,录入设备信息并同步管理,当发生交通事故时,通过第三方接口或手动录入事故地点,自动生成航线任务,无人机自动起飞至事故地点进行拍摄,形成道路勘察成果并上传至云端,在平板设备中编辑并还原事故现场,绘制交通元素,将结果回传并打印或保存为电子版,完成事故处理流程,本发明提供的方法可以避免传统勘查方式需要接触事故现场的人员风险,特别是在事故现场存在危险因素的情况下,无需人员到达现场进行勘查,可以在不同的环境下进行勘察和拍摄。
技术研发人员:王爱芳,蔡亮,陈尧
受保护的技术使用者:南京模幻天空航空科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!