一种散货港口复杂作业区港外车辆防碰撞预测方法与流程
本发明涉及散货港口车辆防碰撞,具体涉及一种散货港口复杂作业区港外车辆防碰撞预测方法。
背景技术:
1、港口散货运输过程中有大量货运车辆参与,如果不对这些车辆进行合理引导,极易产生拥堵甚至碰撞,从而导致车辆行驶时间和港外能耗的增加、港口资源利用率的降低,影响港口吞吐量,目前,如何为港区作业车辆安排合理的行驶路径,并提高港区路网利用效益成为亟待解决的问题。
2、针对散货港口存在的拥堵、碰撞及资源利用率不高等问题,现有方案重点研究了港内作业车辆的智能化引导问题,为同时请求导航的大量作业车辆规划路径,以达到减少作业车辆在港行驶时间、提高港区路网利用效益的目的,但是,现有用于散货港口复杂作业区的港外车辆防碰撞预测方法还存在以下问题:
3、(1)现有技术考虑散货港口的大规模交通路网,在港口车辆实际交通状况的前提下采用了到目的地的最短路径,同时为避免港外车辆因车辆碰撞导致被困在交通拥堵中,也提供了多条替代路径,但替代路径是根据静态路网信息得到的,无法适应港外动态路网状态的实时变化;
4、(2)在车辆运输过程中使用智能导航设备的日益增多,越来越多的车辆开始使用实时选路算法导航,但在港口外大量同时请求导航的车辆,极有可能选择当前畅通的特定几条道路,从而造成拥堵增加车辆行驶时间,因此需要实时预测港外短时交通量;
5、(3)现有的港外车辆防碰撞预测方法未考虑港外交通遇到的交通管制信息及突发事件,缺乏考虑车辆选路对道路交通状态的影响及路网利用效益的不足。
技术实现思路
1、本发明的目的在于提供一种散货港口复杂作业区港外车辆防碰撞预测方法,以解决现有技术中对于无法适应港外动态路网状态的实时变化,需要实时预测港外短时交通量、缺乏考虑车辆选路对道路交通状态的影响以及路网利用效益不足的技术问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:
3、本发明提供了一种散货港口复杂作业区港外车辆防碰撞预测方法,包括以下步骤:
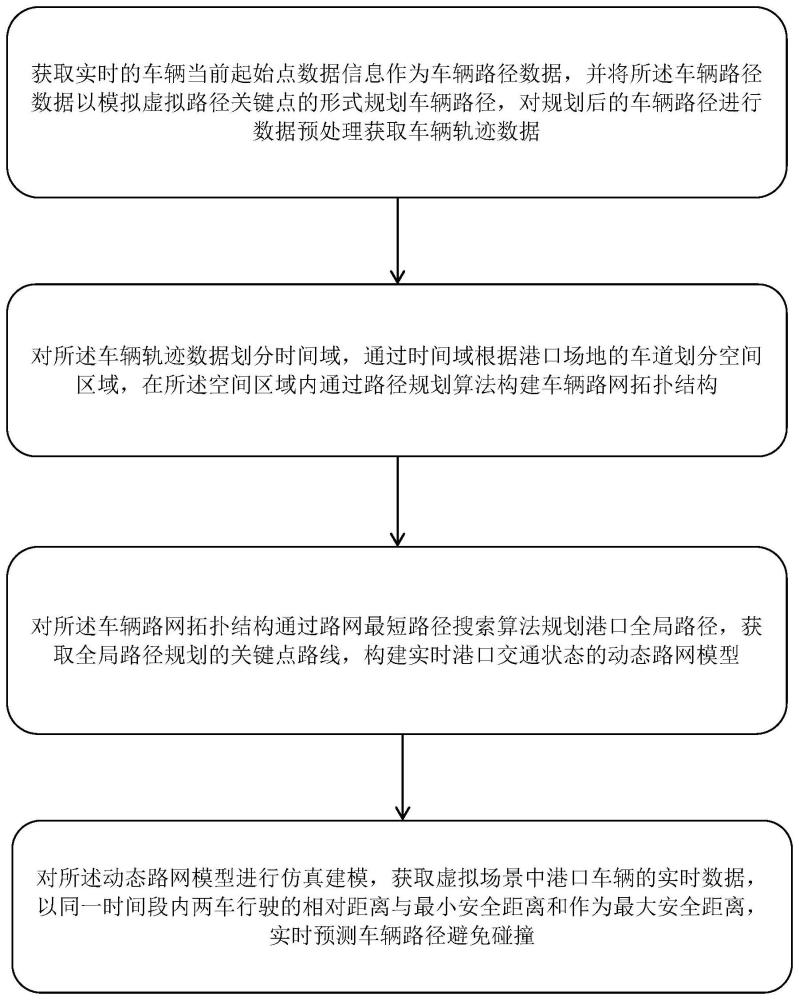
4、获取实时的车辆当前起始点数据信息作为车辆路径数据,并将所述车辆路径数据以模拟虚拟路径关键点的形式规划车辆路径,对规划后的车辆路径进行数据预处理获取车辆轨迹数据;
5、对所述车辆轨迹数据划分时间域,通过时间域根据港口场地的车道划分空间区域,在所述空间区域内通过路径规划算法构建车辆路网拓扑结构;
6、对所述车辆路网拓扑结构通过路网最短路径搜索算法规划港口全局路径,获取全局路径规划的关键点路线,构建实时港口交通状态的动态路网模型;
7、对所述动态路网模型进行仿真建模,获取虚拟场景中港口车辆的实时数据,以同一时间段内两车行驶的相对距离与最小安全距离和作为最大安全距离,实时预测车辆路径避免碰撞。
8、作为本发明的一种优选方案,将所述车辆路径数据以模拟虚拟路径关键点的形式规划车辆路径,包括:
9、通过车联网以5g频段实时获取港口车辆当前起始点数据信息,提取所述当前起始点数据信息的路径关键点信息序列,将含有信息序列的路径关键点作为车辆路径数据;
10、对所述车辆路径数据通过数据清洗后进行场景分类,获取港口全局场景样本数据子集,对所述全局场景样本数据子集进行多项式拟合后,获取当前场景下的规划车辆路径。
11、作为本发明的一种优选方案,对所述规划车辆路径进行数据预处理获取车辆轨迹数据,包括:
12、对所述规划车辆路径提取关键点数据,对所述关键点数据的全局路径进行平滑性处理,根据车辆预设位姿与车辆信息规划车辆轨迹;
13、对所述规划车辆轨迹在安全阈值范围内设定跟踪误差,所述安全阈值主要由当前车辆j选择路径h后的效用路径阻抗和等待时间之和的线性加权设定,所述安全阈值表达式为:
14、
15、其中,ρj(h)表示作业车辆j选择路径h的安全阈值,表示当前车辆j选择路径h的阻抗,δ_nj表示该条路径上所有路段阻抗之和,αj表示车辆j的系数,表示车辆在关键节点处的等待时间之和,v_nj该条路径上所有路段节点的等待时间之和;
16、根据所述跟踪误差判断跟踪轨迹前方是否有障碍物,且不断判断跟踪误差是否超过阈值、安全距离内是否有障碍物以及是否能够在对应车辆路径内完成全部路径规划;
17、若跟踪误差超过安全阈值,则舍弃对应的规划路径;若跟踪误差在安全阈值范围内,则判断跟踪轨迹前方是否具有障碍物;
18、若跟踪路径前方安全距离内有障碍物,则将车辆暂停等待,待前方没有障碍物后,启动车辆至下一关键点,直至完成全局的路径规划,获取车辆轨迹数据。
19、作为本发明的一种优选方案,对所述车辆轨迹数据划分时间域,通过时间域根据港口场地的车道划分空间区域,包括:
20、将所述车辆轨迹数据根据时间轴拟合轨迹位置与时间的曲线,获取轨迹路径曲率变化,将所述轨迹路径曲率激变点剔除,获取时间域内轨迹路径拟合数据;
21、对所述时间域内的轨迹路径拟合数据按同一时间区间截取轨迹路径si(i=1,2,…,n),获取同一时间区间内车辆行驶的道路形状;
22、在同一所述道路形状内,将多条路径si的两端端点延展变换至同一车道进程,计算路径端点沿着车道中心的切向距离,将所述切向距离一致的路径端点划为新路径,作为空间区域的车道划分。
23、作为本发明的一种优选方案,在所述空间区域内通过路径规划算法构建车辆路网拓扑结构,包括:
24、将所述空间区域内车道划分的新路径以数据结构m=(n,e,q)进行表示,其中,n表示新路径有向图的端点集合,e表示新路径有向图的边集合,边表示两个端点之间的有向连接,q表示新路径有向图的权重集合;
25、以数据结构形式在同一时间区间内获取空间区域内车辆的位置、速度、加速度和航向角信息,并通过5g通信获取同一场景下周围车辆的状态信息;
26、将获取的车辆位置信息由经纬度坐标转换为直角坐标系下的二维坐标,计算当前车辆与其他车辆之间的相对位置关系,设置与当前车辆在同一车道内同向或者反向行驶,且在当前车辆前方的车满足碰撞预警触发条件,过滤不满足条件的其他车辆;
27、计算当前车辆与满足触发条件的其他车辆之间的距离、相对速度以及相对加速度,根据所述安全阈值范围判断当前车辆是否有追击他车的趋势,若超过所述安全阈值范围则具有碰撞趋势,计算当前车辆与其他车辆碰撞的时间;
28、根据当前车辆速度计算碰撞时间阈值,设定当前车辆与其他车辆发生碰撞所需的时间小于碰撞时间阈值时,触发预警;
29、规划与当前车辆之间未触发预警的其他车辆的路径,获取所述空间区域内的车辆路网拓扑结构。
30、作为本发明的一种优选方案,对所述车辆路网拓扑结构通过路网最短路径搜索算法规划港口全局路径,包括:
31、将所述车辆路网拓扑结构中的车辆路径起点作为待处理节点node,遍历与所述待处理节点node相连接的邻节点,并将所述邻节点放入对应的节点集合n中,将所述待处理节点node映射为所述邻节点的父节点;
32、对所述父节点进行递归,直至目标终点被放入所述节点集合n中,停止递归,对所述节点集合n进行映射获取映射表,依次搜索起点节点,获取最终搜索路径;
33、初始化所有所述最终搜索路径上的所述节点集合n,选取节点i,遍历所述节点集合n内每一个节点k与节点i的距离,选取最短距离dki,直至处理完所有节点,终止搜索过程,将最短距离dki对应的节点连线后获取全局路径规划的关键点路线。
34、作为本发明的一种优选方案,根据所述全局路径规划的关键点路线,构建实时港口交通状态的动态路网模型,包括:
35、设置所述关键点路线节点上的车辆位置坐标(x,y,θi),其中θi表示对应车辆的转向,根据对应车辆的瞬时速度v计算车辆在所述关键点路线上的行驶时间t,其表达式为:
36、
37、其中,σi表示比例常数,ε表示车辆行驶距离,ω表示单位距离下的车辆行驶权重,ls表示车辆行驶总里程;
38、采用动态窗口法判断当前车辆在未来tw秒内将占用并锁定车道区域片段,获取对应车道的行驶权重ωs,其表达为:
39、ωs=ω0+cv(vr/vero)
40、其中,ω0表示静态状态下车道行驶权重,cv表示比例常数,vr表示车道内对应车辆平均行驶车速,vero表示对应车道内前车的车速;
41、根据所述对应车道的行驶权重ωs规划当前车辆在对应车道的行驶速度,构建车辆的动态路网模型。
42、作为本发明的一种优选方案,采用python语言对所述动态路网模型进行仿真建模,规划全局车辆行驶的task序列,通过云端后台历史日志和回放功能进行全局路径规划,获取虚拟场景中港口车辆的实时数据。
43、作为本发明的一种优选方案,根据所述港口车辆的实时数据,以同一时间段内两车行驶的相对距离与最小安全距离和作为最大安全距离,实时预测车辆路径避免碰撞,包括:
44、根据所述港口车辆的实时数据输入请求路径规划的车辆集合及各车的候选路径集,对每个车辆采用贪心策略选路,作为试探性最佳路径选择,在对车辆进行分组后再组内进行适应性学习;
45、输出各个车辆的试探性最佳路径的选路结果,根据车辆的位置以同一时间段内两车行驶的相对距离与最小安全距离和作为最大安全距离,获取新的车辆选路集合;
46、对所述新的车辆选路集合采用cors算法设置迭代次数获取车辆利用效益,对车辆利用效益进行排序后实时预测车辆避撞路径。
47、本发明与现有技术相比较具有如下有益效果:
48、本发明通过实时获取港外的短时交通流量,将车辆的作业指令、港区工作状态等影响港内交通流量的因素定义为状态向量,对短时交通流量进行单时间步和多时间步预测,在路径搜索过程中,用多个指标评价路径优劣,依据交通流量计算路段阻抗,并考虑了车辆在关键节点处的等待时间及作业流程,获取了作业车辆的候选路径集,为港外的车辆提供了多种路径规划,避免了港外车辆因车辆碰撞导致被困在交通拥堵中,能够适应港外动态路网状态的实时变化。
49、利用港外车辆协同选路法以缓解港区内多作业车辆同时选路造成的路线冲突,各个车辆可以从候选路径集中选择效用最大的路径,依次根据历史选路策略进行适应性学习,直至车辆选路达到均衡,在车辆数目较多的情况下,车辆平均行驶时间和路网能耗均有所降低,使得路网利用效益最大化,充分考虑了车辆选路对道路交通状态的影响及路网的利用效益。
- 还没有人留言评论。精彩留言会获得点赞!