一种无人遥控水下机器人通信系统
本发明涉及无人遥控水下机器人,具体为一种无人遥控水下机器人通信系统。
背景技术:
1、当前,无人遥控水下机器人(rov)一般由水下rov远动本体、脐带电缆与上位机监控装置三大部分构成。而水下rov运动本体根据上位机指令执行任务。脐带缆是上位机监控装置与水下rov运动本体之间的纽带,内部包含电源线、控制以及视觉信号线,主要承担电源输送、信息交互及通讯等功能。但是在实际应用中,水下rov本体在进行水下作业时,脐带缆的长度从一定程度上限制了rov的作业范围,长度过长会导致线缆之间相互缠绕影响操作,长度过短会限制作业范围,且脐带缆一定程度上影响了母船的正常航行。
技术实现思路
1、本发明的目的就在于为了解决上述至少一个技术问题而提供一种无人遥控水下机器人通信系统。
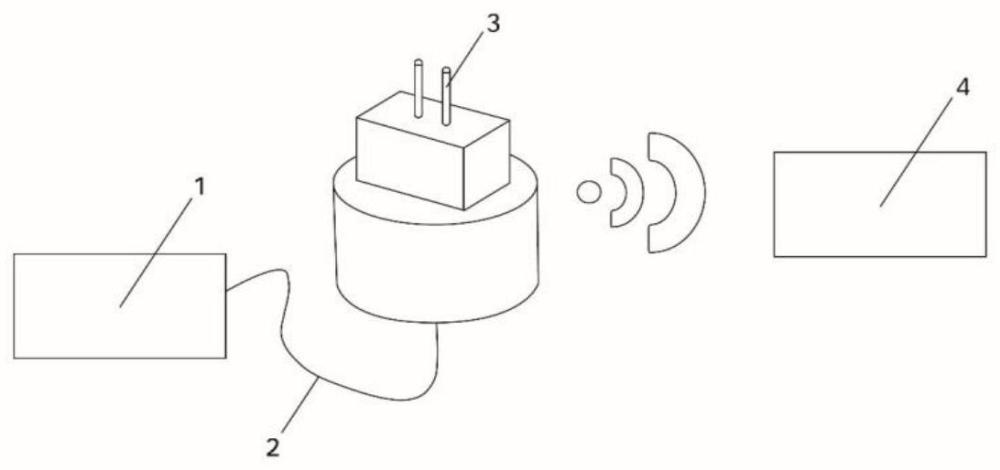
2、第一方面,本发明实施例提供了一种无人遥控水下机器人通信系统,包括:无人遥控水下机器人,浮力缆,无线通信浮标和终端设备,其中,所述无线通信浮标通过所述浮力缆与所述无人遥控水下机器人相连接,所述无线通信浮标与所述终端设备无线通信连接;所述终端设备,用于通过无线通信方式向所述无线通信浮标发送控制指令;所述无线通信浮标,用于利用所述浮力缆和载波网络承载方式将所述控制指令发送给所述无人遥控水下机器人,以及通过无线通信方式将所述无人遥控水下机器人反馈的网络信号发送给所述终端设备;所述无人遥控水下机器人,用于根据所述控制指令执行相应的操作,以及通过所述浮力缆为所述无线通信浮标供电。
3、进一步的,所述无线通信浮标,包括:通信组件和漂浮组件,其中,所述通信组件设置在所述漂浮组件上方;所述通信组件,用于利用所述浮力缆和所述载波网络承载方式将所述控制指令发送给所述无人遥控水下机器人,以及通过无线通信方式将所述无人遥控水下机器人反馈的网络信号发送给所述终端设备;所述漂浮组件,用于为所述无线通信浮标提供浮力以及将所述无线通信浮标在水中调整至竖直姿态。
4、进一步的,所述漂浮组件,包括:壳体,支撑杆,浮体和配重,其中,所述支撑杆和所述浮体设置在所述壳体的顶面和底面之间所述配重设置在所述壳体的底面。
5、进一步的,所述通信组件,包括:防水盒,无线天线,无线通信模块,以太网模块,航空插头和和浮力缆插座,其中,所述无线通信模块、所述以太网模块和所述浮力缆插座设置在所述防水盒内,所述航空插头设置在所述壳体的顶面,所述无线天线设置在所述防水盒的顶部与所述无线通信模块相连接,所述浮力缆插座分别与所述浮力缆和所述航空插头相连接,所述航空插头与所述无线通信模块相连接,所述以太网模块设置在所述航空插头内。
6、本发明提供了一种无人遥控水下机器人通信系统,包括:无人遥控水下机器人,浮力缆,无线通信浮标和终端设备,其中,所述无线通信浮标通过所述浮力缆与所述无人遥控水下机器人相连接,所述无线通信浮标与所述终端设备无线通信连接;所述终端设备,用于通过无线通信方式向所述无线通信浮标发送控制指令;所述无线通信浮标,用于利用所述浮力缆和载波网络承载方式将所述控制指令发送给所述无人遥控水下机器人,以及通过无线通信方式将所述无人遥控水下机器人反馈的网络信号发送给所述终端设备;所述无人遥控水下机器人,用于根据所述控制指令执行相应的操作,以及通过所述浮力缆为所述无线通信浮标供电,本发明实施例中无线通信浮标主动发射无线信号,终端设备可通过接受无线信号建立与水下机器人的通信控制连接,实现无线操纵,从而解决了现有的无人遥控水下机器人通过脐带缆与母船的终端设备相连接,导致无人遥控水下机器人操作不灵活且作业范围较小的技术问题。
技术特征:
1.一种无人遥控水下机器人通信系统,其特征在于,包括:无人遥控水下机器人,浮力缆,无线通信浮标和终端设备,其中,所述无线通信浮标通过所述浮力缆与所述无人遥控水下机器人相连接,所述无线通信浮标与所述终端设备无线通信连接;
2.根据权利要求1所述的无人遥控水下机器人通信系统,其特征在于,所述无线通信浮标,包括:通信组件和漂浮组件,其中,所述通信组件设置在所述漂浮组件上方;
3.根据权利要求1所述的无人遥控水下机器人通信系统,其特征在于,所述漂浮组件,包括:壳体,支撑杆,浮体和配重,其中,所述支撑杆和所述浮体设置在所述壳体的顶面和底面之间所述配重设置在所述壳体的底面。
4.根据权利要求3所述的无人遥控水下机器人通信系统,其特征在于,所述通信组件,包括:防水盒,无线天线,无线通信模块,以太网模块,航空插头和和浮力缆插座,其中,所述无线通信模块、所述以太网模块和所述浮力缆插座设置在所述防水盒内,所述航空插头设置在所述壳体的顶面,所述无线天线设置在所述防水盒的顶部与所述无线通信模块相连接,所述浮力缆插座分别与所述浮力缆和所述航空插头相连接,所述航空插头与所述无线通信模块相连接,所述以太网模块设置在所述航空插头内。
技术总结
本发明公开了一种无人遥控水下机器人通信系统,包括:无人遥控水下机器人,浮力缆,无线通信浮标和终端设备,其中,无线通信浮标通过浮力缆与无人遥控水下机器人相连接,无线通信浮标与终端设备无线通信连接;终端设备用于通过无线通信方式向无线通信浮标发送控制指令;无线通信浮标用于利用浮力缆和载波网络承载方式将控制指令发送给无人遥控水下机器人,通过无线通信方式将无人遥控水下机器人反馈的网络信号发送给终端设备;无人遥控水下机器人用于根据控制指令执行相应的操作,以及为无线通信浮标供电,缓解了现有的无人遥控水下机器人通过脐带缆与母船的终端设备相连接,导致无人遥控水下机器人操作不灵活且作业范围较小的技术问题。
技术研发人员:刘源,赵柯,张绍荣,季骁
受保护的技术使用者:中国人民解放军陆军军事交通学院镇江校区
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!