一种大气污染因子浓度稳定性分析及越限报警判定方法
本发明涉及环保,具体涉及一种大气污染因子浓度稳定性分析及越限报警判定方法。
背景技术:
1、大气污染是当前全球所面临的最主要的环境问题之一,也是我国所面临的最大的环境问题之一。严重的大气污染会对正常的社会生产、生活秩序造成很大的影响,同时也对人体健康造成了严重危害,大气污染的控制与治理已经成为全社会的共识。大气污染因子实时监测系统是大气污染的控制与治理有效辅助手段,通过实时监测系统,可以对各种污染因子的浓度进行实时监测,并持续关注污染因子的浓度的变化。当污染因子的浓度超过某阈值时,监测系统就会感知这种变化进行报警通知管理人员,从而有效地对越限报警进行处置。在真实的系统运行场景中,由于现场监测设备的监测精度、数据传输的误差等各种因素的影响,常常导致监测数据的跳变,从而增加了监测数据的不稳定性。这种非正常的不稳定性常常导致对实时报警的误判,影响正常的监测效果并大大增加了监测和环保事件处置成本。
2、目前在大气污染实时监控系统中,为了排除污染因子浓度数据瞬间跳变的影响,一般采用延时重复监测的方法,即:当在实时监测过程中,出现了某污染因子的实测浓度越限时,不进行立即报警,而是延时一定时间,在延时时间段内对当前污染因子进行较高密度监测。若在延时时间段内,所监测的污染因子浓度依然越限,则最终判定当前污染因子越限并启动报警机制。若在延时时间段内,所监测的污染因子浓度恢复低于报警阈值则忽略本次数据异常。这种处理方式有明显的不足:1、时间延时凭经验而定,不能反映真实的污染监测状态。如果设定的延时时间太短,而由设备随机误差导致的污染因子浓度实时值越限没有恢复,被判定为真实越限报警;如果设定的延时时间太长,虽然对降低报警误判有效,但对真实的报警造成了不必要的时间延误,这对越限报警的实时性要求较高的大气污染实时监测系统并不适用。2、由于在延时判定时间会增大污染因子的实时监测频率,从而增加了实时监测系统服务器的运行载荷,降低运行和数据处理的效率。采用延时重复监测的方法进行报警判定的方法忽略了污染因子浓度的历史数据在报警判定中的作用。
技术实现思路
1、本发明提出了基于高阶高斯混合模型的一种大气污染因子浓度稳定性分析及越限报警判定方法,大大降低了超阈值报警误报的可能性。
2、本发明的技术方案:
3、本发明方法基于高阶高斯混合模型,其中高阶高斯混合模型具体如下:
4、设x为n维列向量,μ为期望,σ2为方差,则:
5、设x={x1,…,xj,…,xn},是几个观测样本,并且各个样本之间是独立的,它们服从k阶高斯混合分布,标记为(w1,w2,…,wj,…,wk),其密度函数为:
6、其中
7、pi是先验概率密度,满足高斯模型参数θi=(μi,σi),这里μi、σi分别为wi阶实时数据的平均值和均方差。
8、设wi的先验概率密度为则样本x={x1,…,xj,…,xn}的数据分布的混合概率密度函数为:
9、其中θ=(p1,…,pk,μ1,…,μk,σ1,…,σk)是混合模型的高斯参数,是对应的高斯分布的先验概率,ωi为第i阶高斯分布,θi为第i阶高斯分布的参数集,参数集包括:概率密度、均值、均方差。
10、一种大气污染因子浓度稳定性分析及越限报警判定方法,包括以下步骤:
11、s1、采集大气污染因子浓度;
12、s2、高阶高斯混合模型的建立及污染因子浓度稳定值计算过程;
13、s3、越限报警的判定,当取得污染因子浓度的稳定值后,对污染因子浓度越限报警进行判定;当有实测值发生越限时,不立即用当前值进行报警与否的判定,而是根据污染因子浓度稳定值进行判定;假设污染因子的报警阈值为dthreshold,则污染因子越限报警的条件为:d>dthreshold,d为污染因子浓度的实测值。
14、优选的,s1采用大气污染实时监测系统采集和监控大气污染因子浓度;大气污染实时监测系统包括现场采集设备和实时监测系统,现场采集设备包含特定污染因子浓度传感器和数据传输模块,并以有线或无线通讯方式与实时监测软件系统连接。现场采集设备中的污染因子浓度传感器测量现场特定污染因子浓度值并由其中内置的数据传输模块将数据按照传输协议的格式要求传送至实时监测软件系统,实时监测软件系统接收到数据后,根据传输协议将数据进行解析,存储。
15、优选的,特定污染因子包括pm2.5、pm10和so2;所述传输协议为hj 212-2017协议。优选的,s2包括:
16、s21、设定混合高斯参数,为污染因子浓度值建立初阶的高斯模型;
17、s22、在数据监测过程中根据实测值对高斯模型进行修正,并建立s阶高斯混合模型进行污染因子浓度稳定值计算。
18、优选的,s21中设定高斯参数初始值θ=(p,μ,σ),其中p为高斯模型的初始概率,μ为高斯模型的初始均值,σ为高斯模型的初始标准差;以θ=(p,μ,σ)建立初阶高斯模型;
19、设定模型更新的学习/遗忘率为τ,匹配阈值为ε,高斯混合模型阶数为s;
20、学习/遗忘率τ为污染因子浓度的监测频率相关量,假设污染因子浓度的监测周期为t毫秒,则取
21、匹配阈值ε用于判定当前实测值是否服从θ所代表的高斯分布,假设污染因子的实测值为d,当σ×ε>|d-μ|是,判定为服从θ所代表的高斯分布;
22、高斯混合模型阶数s规定了需要多少个高斯分布来逼近染因子浓度的稳定值。
23、优选的,假设当前某污染因子的实测值为d,计算过程如下:
24、s221、判断实测值为d与现有高斯模型的匹配度
25、若σ×ε>|d-μ|,则匹配,使用d更新高斯模型参数,如下:
26、p=p×(1-τ)+τ,
27、
28、
29、若不匹配,将当前高斯模型的概率p更新,令:p=p×(1-τ);
30、s222、若实测值d与已有的高斯模型匹配失败,且当前的高阶高斯模型阶数<s,则以θ=(p,d,σ)新建高斯模型;
31、s223、若实测值d与已有的高斯模型匹配失败,且当前的高斯模型阶数=s,则删除p最小的高斯模型,并以θ=(p,d,σ)新建高斯模型;
32、s224、将各阶高斯模型按照p值进行排序,则最大p值对应的μ值即为污染因子浓度的稳定值d,即:
33、优选的,还包括s4采用柔性设计提高污染因子浓度稳定值计算和越限报警判定性能,具体包括:
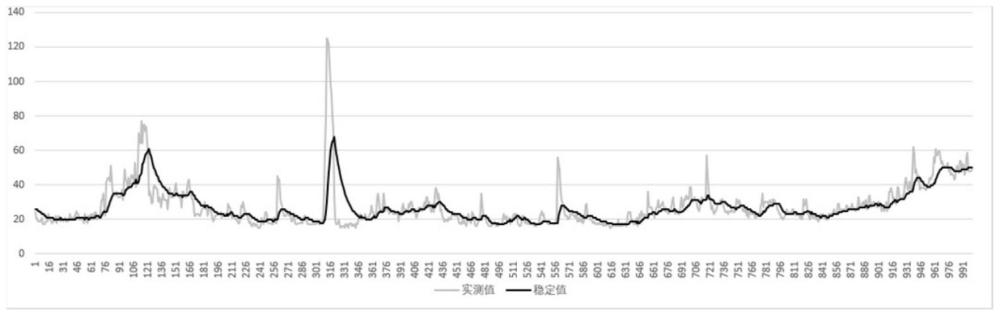
34、s41、对污染因子浓度监测频率的设定;
35、s42、选取高阶高斯混合模型中概率最大的模型的均值或概率加权平均值作为稳定值。
36、优选的,s42中选取高阶高斯混合模型中概率最大的模型的均值或概率加权平均值作为稳定值,稳定值或选取pi为第i阶高斯模型的概率,μi为第i阶高斯模型的均值。
37、本发明的有益效果:
38、采用延时重复监测的方法进行报警判定的方法忽略了污染因子浓度历史数据在报警判定中的参考作用,而污染因子的浓度变化本身就是连续的过程,我们可以从污染因子浓度越限点之前的一定时间段的浓度变化,获得污染因子浓度越限的潜在信息,并以此信息作为参考,辅助污染因子浓度越限报警的判定。
39、本发明采用高阶高斯混合模型对污染因子实时浓度进行分析,获得当前最近时间段内的浓度稳定值。当有越限发生,不会立即用当前值进行越限报警与否的判定,而是根据高阶高斯混合模型算法对污染因子的浓度稳定值进行修订,从而获得新的稳定值。在后续的监测过程中,若污染因子浓度一直处于越限水平,会对污染因子浓度稳定值得影响越来越大,最终会导致污染因子浓度稳定值越限,这样就能够判定为越限报警。如果这种越限发生是污染因子浓度实测值的临时跳变引起的,也会对浓度稳定值产生影响,但是此影响会很快消失,不会引起污染因子浓度稳定值越限,不会产生越限报警。
40、本方法以污染因子浓度的实时监测值为依据进行大气污染因子稳定性分析,获取的稳定值是可靠、可信的,以此为基础进行越限报警的判定,有效解决了延时重复监测的弊端,提升了越限报警判定的有效性。本发明采取进一步的柔性设计在提高污染因子浓度稳定值计算和越限报警判定性能。
- 还没有人留言评论。精彩留言会获得点赞!