一种基于极大似然估计的AVI检测器流量分配方法
本发明涉及交通分配原理与计算,具体涉及一种基于极大似然估计的avi检测器流量分配方法。
背景技术:
1、交通分配(traffic assignment)将调查得到的交通流量按照出行选择准则分配到道路上,从而实现路网运行态势的有效推演。经过50余年的发展,交通分配已经成为交通规划与管控的核心理论与基础方法。在传统交通分配方法中,输入是通过调查得到的起讫点出行分布(od矩阵),出行选择准则是随机用户均衡,输出是路段流量。
2、传统的检测器流量分配方法以难以获取的od流量为输入,与传统方法不同,本发明以我国广泛布设的avi(automatic vehicle identification)检测器记录的交通流量作为输入,发明了一种基于极大似然估计的avi检测器流量分配方法;本发明的分配过程的输入是检测器流量,可直接从avi检测器中收集,输入数据更易获取。其次,目前研究对检测器的信息利用程度不高,本发明综合利用了个体的空间约束和时间信息,输入的个体信息更丰富。此外,现有的交通分配问题的计算是不可切分的,本发明仅通过对相关检测器执行分配过程来估计一个或多个路径流量,而无需考虑整个道路网络上路径之间的复杂平衡关系,让计算范围可以切分。
技术实现思路
1、本发明目的:在于提供一种基于极大似然估计的avi检测器流量分配方法,与传统的路径流估计方法不同,本发明将路径流视为检测器流的分配结果,而不是od流。利用这一新的视角,将ue假设和先验od矩阵替换为时间一致性假设和检测器对之间的观测交通流,输出更真实的结果。
2、为实现以上功能,本发明设计一种基于极大似然估计的avi检测器流量分配方法,针对目标区域,执行如下步骤s1-步骤s4,完成检测器流量的分配:
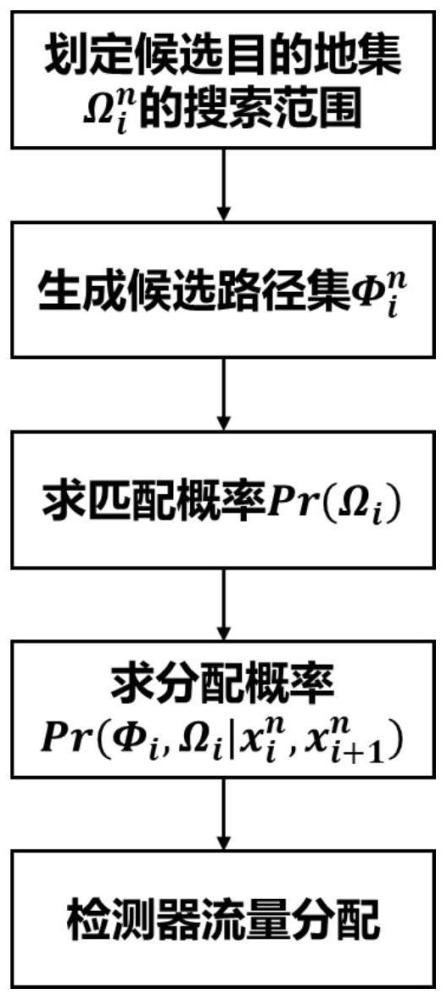
3、步骤s1:分别针对行驶于目标区域中的各车辆样本,基于时空棱镜,确定车辆样本的候选目的地,并构建候选目的地集;
4、步骤s2:基于候选目的地集,使用有偏随机游走算法生成连接各目的地的候选路径集;
5、步骤s3:根据车辆样本经过的目的地次序和路径次序,构建目的地次序候选集和路径次序候选集,基于车辆样本被检测器捕获的概率,构建并求解似然函数最优化模型,推断车辆样本与不同目的地次序和路径次序的匹配概率;
6、步骤s4:基于车辆样本与不同目的地次序和路径次序的匹配概率,计算检测器流量的分配概率,根据最大分配概率对应的目的地和路径将检测器流量分配至目标区域的路网中。
7、有益效果:相对于现有技术,本发明的优点包括:
8、1、输入数据更易获取。新的分配过程的输入是检测器流量,可以直接从avi检测器中收集,而不是传统方法中难以获取的od流量。
9、2、个体信息更丰富。检测器流提供了更丰富的个体出行信息,不仅包括空间约束(跟踪车辆必须接近观测到它的检测器,并且不太可能通过从未捕捉到它的检测器),还包括时间信息(两个相邻检测器记录的经过时间应该等于跟踪车辆移动的总时间消耗)。这样的时空信息将有助于我们构建新的分配规则来估计路径流量。
10、3、计算范围可切分。我们可以仅通过对相关检测器执行分配过程来估计一个或多个路径流量,而无需考虑整个道路网络上路径之间的复杂平衡关系。
技术特征:
1.一种基于极大似然估计的avi检测器流量分配方法,其特征在于,针对目标区域,执行如下步骤s1-步骤s4,完成检测器流量的分配:
2.根据权利要求1所述的一种基于极大似然估计的avi检测器流量分配方法,其特征在于,步骤s1中所述的时空棱镜的间隔开始时间为第n个车辆样本被检测器记录到的时间戳时空棱镜的间隔结束时间为第n个车辆样本被检测器记录到的时间戳时空棱镜的时间轴需要满足时间消耗小于时间预算,其中,时间消耗为车辆样本在检测器和之间的行驶时间和目的地停留时间之和;时间预算为车辆样本分别经过检测器和被记录下的时间戳之差。
3.根据权利要求1所述的一种基于极大似然估计的avi检测器流量分配方法,其特征在于,步骤s3的具体步骤如下:
4.根据权利要求3所述的一种基于极大似然估计的avi检测器流量分配方法,其特征在于,步骤s3.2中的匹配概率模型根据路径-目的地组合之间的观测时间预算和时间消耗的时间一致性来衡量,所述的时间一致性是指检测器对观测到的第n辆车辆样本经过的时间戳之差与实际行驶的时间消耗一致;所述的时间消耗包括路径时间消耗和目的地时间消耗,记路径时间消耗函数为f(c|pi,j),目的地时间消耗函数为其中c为消耗时间,为车辆样本经过目的地di,j的时间,在连接检测器和目的地di,1的路径为pi,0的条件下,车辆样本在时刻从检测器出发并在时刻到达第一个目的地di,1的概率为:
5.根据权利要求3所述的一种基于极大似然估计的avi检测器流量分配方法,其特征在于,步骤s3.2中所述的路径次序选择模型求解过程如下:
6.根据权利要求5所述的一种基于极大似然估计的avi检测器流量分配方法,其特征在于,偏好系数的取值分别为:βftt=-0.17856,βnsi=0.00052,βpe=-9.22457,βps=1.87072,βsb=0.15409。
7.根据权利要求3所述的一种基于极大似然估计的avi检测器流量分配方法,其特征在于,步骤s4的具体步骤如下:
技术总结
本发明公开了一种基于极大似然估计的AVI检测器流量分配方法,包括基于时空棱镜划定候选目的地集的搜索范围;在候选目的地集基础上,使用有偏随机游走算法生成连接各目的地的候选路径集;通过求解似然函数最优化模型,推断不同候选目的地集的匹配概率;基于极大似然估计进行检测器流量分配;本发明将路径流视为检测器流的分配结果而不是OD流,并基于这一新的视角,将UE假设和先验OD矩阵替换为时间一致性假设和检测器对之间的观测交通流,从而得到更真实的结果。
技术研发人员:曹奇,祁垚,任刚,陈果尔,邓玥,吴场建,张哲,王瑞宇
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!