基于GMM和向量的任意轨迹源交叉口道路信息挖掘方法与流程
本发明涉及数据挖掘技术及机器学习,具体涉及基于gmm和向量的任意轨迹源交叉口道路信息挖掘方法。
背景技术:
1、在智能交通领域,道路信息的采集与应用扮演着至关重要的角色,它关系到信号控制、信号优化、自动驾驶等多个关键领域的有效运作与发展。这些领域的成功依赖于能够提供准确、及时的道路信息。
2、然而,获取高质量的道路信息一直是一个充满挑战的任务。传统的获取方法往往需要大量的人力、时间和经济投入,且很难迅速适应不断变化的交通环境。
技术实现思路
1、本发明的目的是:实现道路信息的全自动化解析,以显著降低相关业务在实施和运维阶段的成本。
2、为了实现上述发明目的,本发明的技术方案是提供了基于gmm和向量的任意轨迹源交叉口道路信息挖掘方法,包括以下步骤:
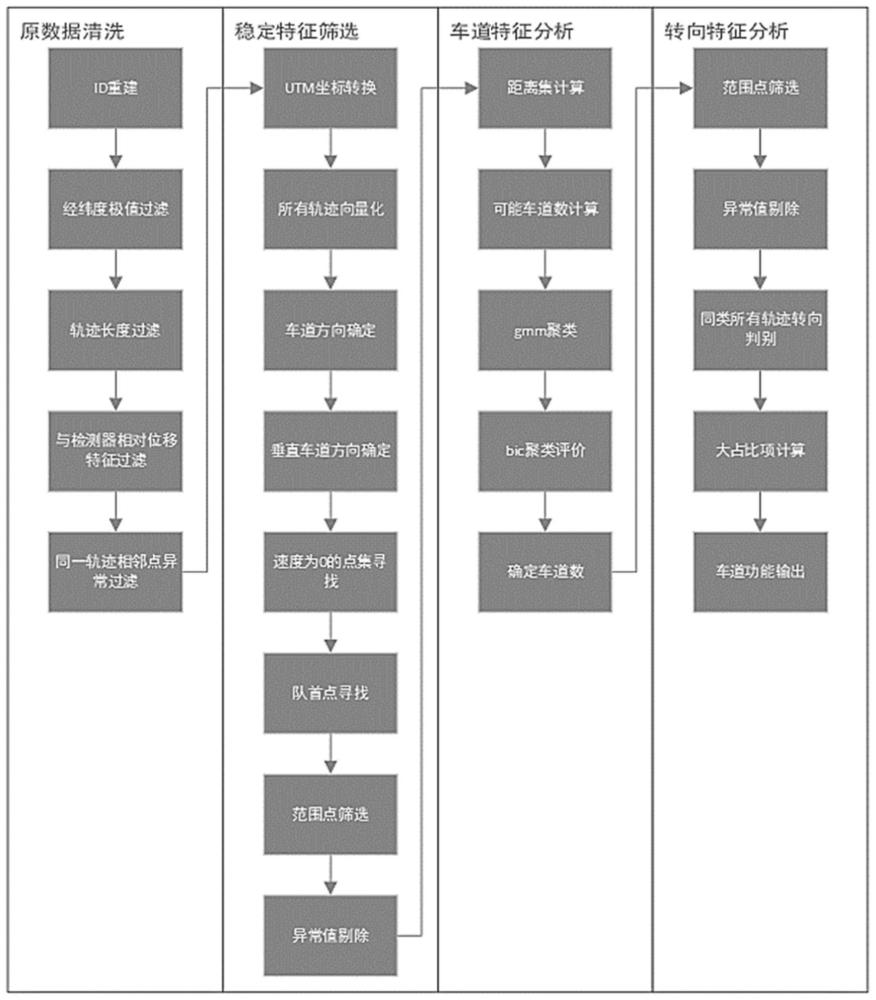
3、步骤1:利用感知设备提供的目标id和时间戳组合,对车辆的轨迹数据中的原车辆id进行车辆id重建,生成长时间范围内的唯一编码,得到车辆id;
4、步骤2:针对目标所在地的经纬度范围对轨迹数据进行经纬度极值过滤,根据车辆id筛选出同一车辆id的轨迹点,计算每条轨迹的长度,并剔除轨迹长度短的轨迹,在目标与检测器相对位移中,筛选离检测器近的轨迹,计算每一条轨迹中时间相邻点的距离,去除相邻点距离大的轨迹,得到清洗完成的数据集;
5、步骤3:将清洗完的数据集中的经纬度转化为utm坐标,根据车辆id将每条轨迹进行向量化得到轨迹向量,并计算轨迹向量之和的斜率和垂直于车道方向的斜率,筛选出速度为零的utm坐标点,并基于直线的斜截式计算类停止线的斜率和截距,将类停止线向进口道反方向移动截取并确定新停止线,经过支持向量机将异常值剔除,得到最终稳定特征点集;
6、步骤4:计算最终稳定特征点集到同一直线的距离集,得到预估车道数,使用gmm聚类,得到聚类结果;
7、步骤5:使用贝叶斯信息准则,对聚类结果进行评估,得到最终车道数量,后根据车辆id进行分类,得到id集合;
8、步骤6:将类停止线沿特定方向向量平移得到新的数据集,根据id集合进行数据过滤,得到转向特征数据;
9、步骤7:根据转向特征数据中的轨迹向量确定转向关系,对转向关系进行转向判别分析。
10、优选地,在所述步骤3中,设定每个轨迹向量为vi=[dxi,dyi],其中i为车辆轨迹的编号,计算轨迹向量之和v,即v=∑ivi=[∑dxi,∑dyi],通过纵向总位移与横向总位移的比值,计算总向量v的斜率m,即将斜率m的负倒数作为垂直于车道方向的斜率nn,即
11、优选地,在所述步骤3中,所述支持向量机采用径向基函数作为核函数,并设置参数μ=0.1,即:svm(kernel=′rbf′,μ=0.1),将异常值剔除。
12、优选地,所述步骤4包括以下步骤:
13、步骤401:在最终稳定特征点集中任选一点(xr,yr),计算经过该点且斜率为m的直线liner;
14、y=m(x-xr)+yr
15、步骤402:定义参考向量为v1=[dx,dy],对于最终稳定特征点集中的每个点(xi,yi),计算相对于中心点的向量utm=[xi-xcenter,yi-ycenter],计算叉积v2=v1×utm,根据叉积的正负,将点分类为在参考线的同一侧或相反侧;
16、步骤403:计算任意点(xi,yi)到直线liner的垂直距离,并存储在数组array(a)和array(b)中,分别从数组array(a)和array(b)中提取两个集合的点至直线liner的最大距离,结合预设的车道宽度w,确定聚类结果:
17、
18、步骤404:将array(a)和array(b)合并得到array(c),并使用gmm聚类,类数量取c-1、c以及c+1,通过标准道路设计宽度和置信水平得到标准偏差上限和标准差下限,将标准偏差上限和标准差下限应用到聚类结果。
19、本发明的技术方案提出基于gmm和向量的任意轨迹源交叉口道路信息挖掘方法,通过七个步骤:1)身份重建、2)数据清洗、3)稳定特征筛选、4)高斯混合模型(gmm)聚类、5)分析聚类结果、6)转向特征筛选、7)转向判别分析,有效地挖掘了交叉口的道路信息,再自动化解析道路信息,显著降低了相关业务的实施和运维成本。所依赖的轨迹数据来源广泛,包括车载gps系统、驾驶员手机信号,以及路侧感知设备如摄像头和雷达。在设计过程中,充分考虑了工程实施的可行性,优化模型与数值计算的比例,旨在保证系统鲁棒性的同时减少对硬件资源的需求。在实际项目测试中,该方法也显示出了极高的可靠性。
20、本发明提供的技术方案包含了空间问题的向量化处理和无监督机器学习方法以剔除异常值,以及应用混合高斯模型(gmm)聚类技术。这种方法的目的在于实现道路信息的全自动化解析,以显著降低相关业务在实施和运维阶段的成本。通过这种创新技术,可以更有效地处理和利用道路信息,从而推动智能交通行业的进一步发展。
技术特征:
1.基于gmm和向量的任意轨迹源交叉口道路信息挖掘方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于gmm和向量的任意轨迹源交叉口道路信息挖掘方法,其特征在于,在所述步骤3中,设定每个轨迹向量为vi=[dxi,dyi],其中i为车辆轨迹的编号,计算轨迹向量之和v,即v=∑ivi=[∑dxi,∑dti],通过纵向总位移与横向总位移的比值,计算总向量v的斜率m,即将斜率m的负倒数作为垂直于车道方向的斜率nn,即
3.如权利要求1所述的基于gmm和向量的任意轨迹源交叉口道路信息挖掘方法,其特征在于,在所述步骤3中,所述支持向量机采用径向基函数作为核函数,并设置参数μ=0.1,即:svm(kernel=′rbf′,μ=0.1),将异常值剔除。
4.如权利要求1所述的基于gmm和向量的任意轨迹源交叉口道路信息挖掘方法,其特征在于,所述步骤4包括以下步骤:
技术总结
本发明提出基于GMM和向量的任意轨迹源交叉口道路信息挖掘方法。所述方法特别关注于数据源中的异常数据处理,同时考虑了在工程实践中的成本、资源利用和系统鲁棒性等关键因素。通过这种创新的挖掘方法,旨在解决获取准确、实时的道路信息所面临的挑战。所述方法不仅提高了道路信息的准确性和时效性,而且在降低实施成本和提高系统稳定性方面也展现出显著优势,从而有效支持智能交通系统的发展。
技术研发人员:朱恒,赵超,辛国容,还斌,赵益
受保护的技术使用者:上海衍之辰科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!