混合交通流中考虑驾驶员服从度的可变限速策略测试方法
本发明涉及交通智能控制领域,具体为一种混合交通流中考虑驾驶员服从度的可变限速策略测试方法。
背景技术:
1、在交通处于供不应求的状态下,任何轻微的扰动都极易发生交通震荡和传播,从而导致交通拥堵,影响交通系统的通行能力。可变限速控制技术作为有效的高速公路交通管控方法,受到了国内外交通管理者的重视。
2、可变限速技术的控制效果在极大程度上依赖于所应用的控制策略。由于可变限速控制策略在本质上是需求响应型和启发式式的,所以驾驶员的服从程度对可变限速的控制效果有着决定性作用。与此同时,随着智能网联车的不断发展,混合交通流出现在人们的视野当中。此时,人类驾驶员在一定程度上会受到智能网联车严格服从限速值的影响,所表现出的服从度特征又将不同于纯人类驾驶员的驾驶环境。并且这一情况将长期存在于现实场景中,所以将驾驶员的服从度与智能网联车的渗透率融合考虑到可变限速策略的构建和测试中去显得十分必要。
3、目前,绝大多数可变限速策略的研究停留在理论层面,部分研究虽提到了混合交通流并搭建了不同智能网联车渗透率的仿真场景,但其仅仅提到了智能网联车会依靠精准的感知、通行和控制能力,严格地遵守可变限速标志牌发布的限速值,并未给出除智能网联车以外其他车辆(如传统人驾车)面对发布限速值的表现情况,这使得可变限速策略的测试效果难具实际意义。
技术实现思路
1、针对现有技术中限速策略因未考虑传统人驾车的限速表现而测试精度较低的问题,本发明提供一种混合交通流中考虑驾驶员服从度的可变限速策略测试方法。
2、本发明是通过以下技术方案来实现:
3、一种混合交通流中考虑驾驶员服从度的可变限速策略测试方法,包括以下步骤:
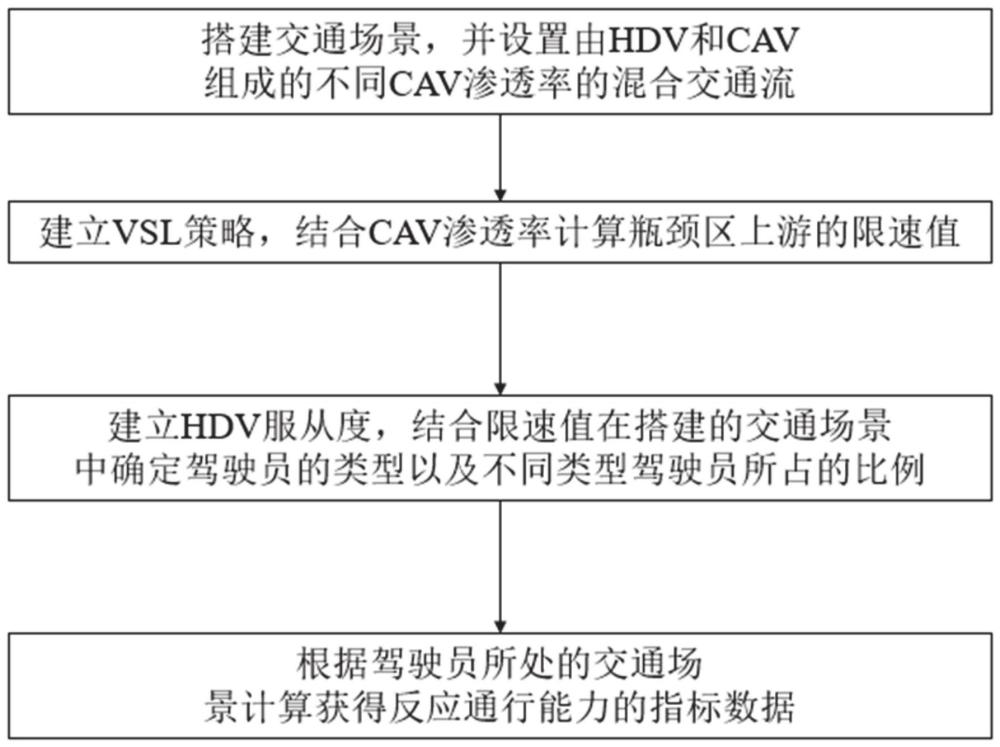
4、搭建交通场景,并设置由hdv和cav组成的不同cav渗透率的混合交通流;其中,搭建的交通场景以三车道为主道路、单车道为匝道,并选取主道路与匝道汇入形成瓶颈区的路况;
5、建立vsl策略,结合cav渗透率计算瓶颈区上游的限速值;
6、建立hdv服从度,结合限速值在搭建的交通场景中确定驾驶员的类型以及不同类型驾驶员所占的比例;
7、根据驾驶员所处的交通场景计算获得反应通行能力的指标数据。
8、优选的,根据hdv和cav的组成形成五种不同cav渗透率的混合交通流,分别为纯hdv、10% cav渗透、20% cav渗透、30% cav渗透和90%cav渗透的交通场景,其中hdv和cav的长度、宽度一致。
9、优选的,vsl策略包括基于反馈的可变限速策略和基于最优的可变速策略。
10、优选的,基于反馈的可变限速策略包括两级反馈级联控制,第一级控制通过调整目标流量,使其尽可能的接近瓶颈区域的目标密度,最终实现瓶颈区域流量的最大化;第二级控制通过调节限速值比例来调节可变限速控制区域的流出流量。
11、优选的,基于最优的可变限速策略确定限速值时,利用元胞传输模型建模,对元胞的密度演变和速度演变进行计算,从而得到目标函数的最优值情况来确定限速值,具体如下:
12、s11,建立基于元胞传输模型的分析模型,将高速公路划分为可变长度区域(元胞长度δx),并将时间划分为离散的时间步长(持续时间为δt);每个元胞的长度δxi必须遵循步长建模的约束:vfreeδt≤δxi;其中,vfree为自由流速度;
13、s12,通过对瓶颈区进行建模和修改自由流速度修改交通基本图,调整瓶颈区的流量;
14、s13,根据s12中修改交通基本图分析密度动态和速度动态,以获取元胞的密度和平均速度;对于应用vsl的元胞,采用如下公式预测元胞的平均速度:
15、vi(k+1)=rcav*ui(k)+(1-rcav)*[rde*(ui(k)-5)+rco*ui(k)+rag*(ui(k)+5)]
16、公式中,ui(k)表示在第k步对第k+1步限速值的预测值,rcav为交通流中智能网联车所占的比例,rde、rco、rag分别为防御型驾驶员、服从型驾驶员和攻击型驾驶员所占的比例。
17、优选的,限速值的范围为[40,50,60,70,80,90,100,110];
18、驾驶员的类型根据行驶速度分为防御型驾驶员、攻击型驾驶员和服从型驾驶员,其中,防御型驾驶员以(限速值-5)km/h速度以下的速度行驶;攻击型驾驶员以(限速值+5)km/h速度以上的速度行驶;服从型驾驶员以(限速值±5)km/h速度范围内的速度行驶。
19、优选的,hdv服从度表示当前交通状况下人驾车在限速值情况下的服从程度,服从型驾驶员在所有驾驶员中所占的比例,hdv服从度包括低水平服从度、中等水平服从度、高水平服从度和理想水平服从度。
20、一种混合交通流中考虑驾驶员服从度的可变限速策略测试系统,其特征在于,包括模型建立模块、vsl策略模块、hdv服从度建立模块、cav渗透率模块和数据处理模块;模型建立模块用于搭建交通场景;vsl策略模块用于建立vsl策略;hdv服从度建立模块用于建立hdv服从度,cav渗透率模块用于获取cav渗透率,数据处理模块用于计算瓶颈区的限速值、确定驾驶员的类型以及不同类型驾驶员所占的比例和获取反应通行能力的指标数据。
21、一种终端设备,包括存储器、处理器以及存储在所述存储器中并在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述方法的步骤。
22、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述方法的步骤。
23、与现有技术相比,本发明具有以下有益效果:
24、本发明一种混合交通流中考虑驾驶员服从度的可变限速策略测试方法基于微观仿真软件和相关研究,搭建了智能网联车渗透率的混合交通流场景,并通过分析现实数据确定了四种服从度场景及相应服从度场景下面对不同限速值时防御型驾驶员与攻击型驾驶员所占的比例,以此对智能网联车和传统人驾车发布限速策略,更接近真实的交通场景,可以提升可变限速策略的测试精度,对于可变限速策略的测试效果更具实际意义,同时也为构建考虑智能网联车渗透率和人类驾驶员服从度的可变限速策略奠定了基础。
25、进一步,在基于最优的可变限速策略获取限速值的过程中,利用元胞传输模型建模,对元胞的密度演变和速度演变进行计算,从而得到目标函数的最优值情况来确定限速值。其中,每个元胞都有单独需求函数和供给函数,可对应对于交通基本图进行自由流速度的修改和瓶颈区的建模,当瓶颈区激活后,会出现容量下降。在元胞的需求和供给函数确定后,计算单个元胞流量,进而对元胞的密度演变进行预测。
26、进一步的,通过密度预测和平均速度预测即可计算由总行程时间和总行程距离的加权和组成的目标函数,从而在受各项现实规范的约束,在当前限速确定的情况下,下一个阶段的限速选择就可以确定,根据模拟分析当预测为两步时,可以选择基于最优的限速策略使得目标函数最优的限速值进行应用,且两步应用的效果要比一步应用效果要好。
- 还没有人留言评论。精彩留言会获得点赞!