一种高速公路空地检测协同布设方法、设备及介质与流程
本发明涉及智能交通,尤其涉及一种高速公路空地检测协同布设方法、设备及介质。
背景技术:
1、高速公路上交通拥堵和交通事故等突发事件频发,严重影响着道路出行效率和交通安全。交通流全息感知技术能够实时获取高速公路上全时空交通流动态运行状态信息,快速高效地发出应急疏导需求,科学合理地指导对于突发事件的应急交通疏散,提升高速公路交通管控效率,保障道路出行安全,避免突发事件的二次影响。
2、检测器布设是高速公路交通流全息感知技术的关键难题,现有的高速公路感知体系中主要包括门架、收费站等固定式地面检测器。由于高速公路路网规模较大,地面检测器自身检测范围有限且布设存在稀疏性,以致其无法满足道路交通流全方位、无盲区实时监测的需求,难以有效解决突发事件下高速公路应急响应效率低下等问题。因此,如何优化布设高速公路交通感知网络,提升全时空交通流监测能力,快速高效地响应突发事件应急需求,对于智慧高速交通运营管理而言具有十分重要的意义。
技术实现思路
1、本发明实施例提供了一种高速公路空地检测协同布设方法、设备及介质,用于解决如下技术问题:由于高速公路路网规模较大,地面检测器自身监测范围有限且布设存在稀疏性,以致其无法满足道路交通流全方位、无盲区实时监测的需求,难以解决突发事件下高速公路应急响应效率低下等问题。
2、本发明实施例采用下述技术方案:
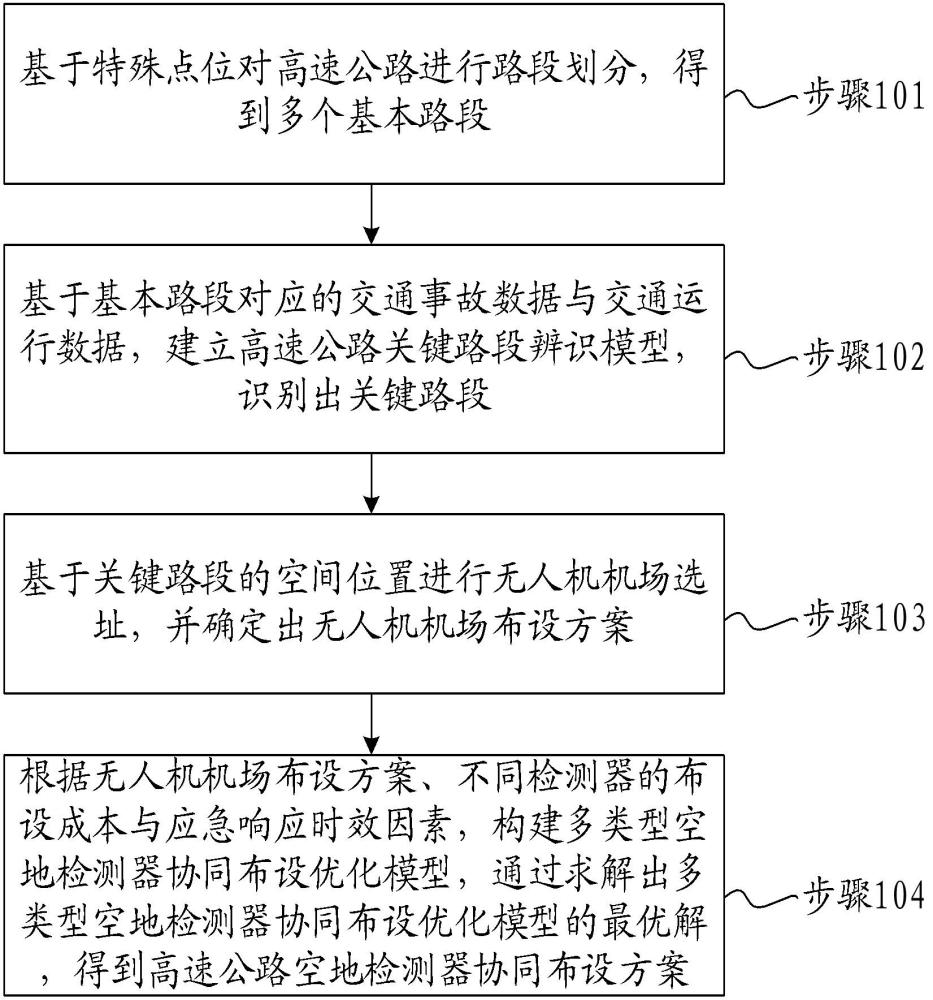
3、本发明实施例提供一种高速公路空地检测协同布设方法。包括,基于特殊点位对高速公路进行路段划分,得到多个基本路段;其中,特殊点位与高速公路路网结构相关;基于基本路段对应的交通事故数据与交通运行数据,建立高速公路关键路段辨识模型,识别出关键路段;基于关键路段的空间位置进行无人机机场选址,确定出无人机机场布设方案;根据无人机机场布设方案、不同检测器的布设成本与应急响应时效因素,构建多类型空地检测器协同布设优化模型,通过求解出多类型空地检测器协同布设优化模型的最优解,得到高速公路空地检测器协同布设方案。
4、本发明实施例通过融合事故数据和流量数据,构建高速公路关键路段辨识模型,能够有效识别高速公路的易发生事故或拥堵的脆弱路段,快速定位高速公路重大应急需求的关键路段。其次,本发明实施例基于关键路段的位置数据建立无人机机场布设模型,通过canopy算法与k-means算法的融合加快了布设模型的求解速度,有效提高了突发事件下的应急救援响应效率。此外,本发明实施例构建多类型空地检测器协同布设优化模型,采用非支配麻雀搜索算法求解该模型的帕累托最优解,解决了多目标加权算法难以确定权重系数的问题。生成的空地检测器布设方案,突破了传统地面检测器无法对道路进行全面监测且突发事件下响应速度慢的局限性,显著提高了高速公路交通网络感知的时空覆盖率和应急响应效率。
5、在本发明的一种实现方式中,基于基本路段对应的交通事故数据与交通运行数据,建立高速公路关键路段辨识模型,具体包括:基于地图匹配技术,对基本路段对应的交通事故数据和门架数据进行统计分析,以获取基本路段对应的交通事故次数与交通量;基于基本路段对应的交通事故次数、交通量与基本路段的长度,构建路段失效概率模型;将路段失效概率模型进行无量纲化处理,以使路段失效概率数据归一化至预设区间范围内;基于网络效率变化构建路段失效后果模型,以通过路段失效后果模型得到路段失效后果指标值;基于归一化后的路段失效概率数据与路段失效后果指标值,建立高速公路关键路段辨识模型。
6、在本发明的一种实现方式中,基于关键路段的空间位置进行无人机机场选址,确定出无人机机场布设方案,具体包括:基于canopy算法,确定出无人机机场布设数量与初始机场聚类中心集合;将无人机机场布设数量与初始机场聚类中心集合,作为k-means算法的输入,基于k-means算法输出无人机机场布设方案;其中,无人机机场布设方案包括,最终机场聚类中心布设位置和布设数量。
7、在本发明的一种实现方式中,将无人机机场布设数量与初始机场聚类中心集合,作为k-means算法的输入,基于k-means算法输出无人机机场布设方案,具体包括:将无人机机场布设数量与初始机场聚类中心集合,作为k-means算法的输入;确定出各关键路段中心点分别到所有机场聚类中心的欧式距离,基于距离最近原则对关键路段中心点进行归类,得到多个簇,分别计算簇内位置平均值,以迭代出新的聚类中心;基于预设函数确定出当前聚类误差平方和,在前后两次迭代聚类误差平方和一致的情况下,得到最终聚类中心的位置和数量,以输出无人机机场选址布设方案。
8、在本发明的一种实现方式中,根据无人机机场布设方案、不同检测器的布设成本与应急响应时效因素,构建多类型空地检测器协同布设优化模型,具体包括:根据无人机机场布设方案、不同检测器的布设成本与应急响应时效因素,构建多目标函数优化模型与多目标函数优化模型对应的约束条件;其中,约束条件至少包括,一架无人机至多覆盖一条关键路段、一条关键路段至多布设一架无人机、无人机数量限制、固定检测器数量限制、一条路段布设一种类型检测器以及无人机飞行里程不大于最大续航里程中的一项。
9、在本发明的一种实现方式中,根据无人机机场布设方案、不同检测器的布设成本与应急响应时效因素,构建多目标函数优化模型,具体包括:基于不同检测器的布设成本相关数据,构建多类型空地检测器布设成本优化模型;其中布设成本相关数据至少包括路段节点集合、无人机机型集合、固定检测器类型集合、无人机的购置成本、无人机的维修成本、固定检测器的购置成本、固定检测器的维修成本、固定检测器的安装成本、无人机的使用年限、固定检测器的使用年限、不同路段长度、固定检测器的布设间隔、各路段无人机分配情况、各路段固定检测器分配情况、固定检测器覆盖车道数以及路段车道数中的一项;基于应急响应时效因素相关数据,构建应急响应时效优化模型;其中,应急响应时效因素相关数据至少包括无人机应急反应时间、固定检测器应急反应时间、无人机的飞行速度、应急救援车车速、无人机机场与交通事故之间的距离、高速收费站与交通事故之间的距离、不同路段对应的事故影响范围、路政车拥堵延迟响应系数、各路段无人机分配情况以及各路段固定检测器分配情况中的一项;基于多类型空地检测器布设成本优化模型与应急响应时效优化模型,构建多目标函数优化模型。
10、在本发明的一种实现方式中,基于多类型空地检测器布设成本优化模型与应急响应时效优化模型,构建多目标函数优化模型,具体包括:
11、基于函数:
12、;
13、;
14、构建所述多目标函数优化模型;其中, f1为检测器布设成本; f2为应急响应时效; r为路段节点集合,其中, i和 j表示相邻路段的节点;为无人机 u的购置成本,为无人机 u的维修成本,为固定检测器类型 d的购置成本,为固定检测器类型 d的维修成本, c对应的数字上下标为空地检测器类型区分;为固定检测器类型 d的安装成本;为无人机 u的使用年限,为固定检测器类型 d的使用年限, life对应的数字上下标为空地检测器类型区分; dij表示不同路段长度;表示不同路段下的事故影响范围;为固定检测器类型 d的布设间隔;表示机场向路段( i, j)分配一架无人机 u,表示路段未分配无人机,为固定检测器 d布设在路段( i, j)上,表示该路段未布设固定检测器, x对应的数字上下标为空地检测器类型区分;为固定检测器 d可覆盖的车道数;为路段车道数;为拥堵延迟响应系数; t1、 t2分别为无人机应急反应时间和固定检测器应急反应时间;表示无人机 u的飞行速度;为应急救援车车速;为无人机机场与交通事故 a之间的距离;为高速收费站与交通事故 a之间的距离。
15、在本发明的一种实现方式中,通过求解出多类型空地检测器协同布设优化模型的最优解,得到高速公路空地检测器协同布设方案,具体包括:基于非支配麻雀搜索算法,设定群体存在多只麻雀,并设定出多只麻雀的搜索空间位置集合,其中,麻雀有发现者、跟随者和警戒者三种角色,每只麻雀个体代表一种空地检测器布设方案;基于种群规模、迭代次数、发现者比例以及警戒者比例,初始化可行解,记为父代种群,并确定出每只麻雀的适应度;三种角色的麻雀基于不同的位置更新策略,生成不同的空地检测器布设方案;通过更新麻雀位置得到子代种群,重新计算不同个体的适应度,将父代种群和子代种群进行合并,根据适应度进行非支配排序和拥挤度计算;基于非支配等级和拥挤度,选出符合条件的麻雀个体,生成新一代种群;重复更新群体麻雀位置,直到达到迭代次数,输出最优的空地检测器协同布设方案。
16、本发明实施例提供一种高速公路空地检测协同布设设备,包括:至少一个处理器;以及,与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够:基于特殊点位对高速公路进行路段划分,得到多个基本路段;其中,特殊点位与高速公路路网结构相关;基于基本路段对应的交通事故数据与交通运行数据,建立高速公路关键路段辨识模型,以通过高速公路关键路段辨识模型识别出关键路段;基于关键路段的空间位置进行无人机机场选址,确定出无人机机场布设方案;根据无人机机场布设方案、不同检测器的布设成本与应急响应时效因素,构建多类型空地检测器协同布设优化模型,通过求解出多类型空地检测器协同布设优化模型的最优解,得到高速公路空地检测器协同布设方案。
17、本发明实施例提供的一种非易失性计算机存储介质,存储有计算机可执行指令,计算机可执行指令设置为:基于特殊点位对高速公路进行路段划分,得到多个基本路段;其中,特殊点位与高速公路路网结构相关;基于基本路段对应的交通事故数据与交通运行数据,建立高速公路关键路段辨识模型,识别出关键路段;基于关键路段的空间位置进行无人机机场选址,确定出无人机机场布设方案;根据无人机机场布设方案、不同检测器的布设成本与应急响应时效因素,构建多类型空地检测器协同布设优化模型,通过求解出多类型空地检测器协同布设优化模型的最优解,得到高速公路空地检测器协同布设方案。
18、本发明实施例采用上述至少一个技术方案能够达到以下有益效果:本发明实施例通过融合事故数据和流量数据,构建高速公路关键路段辨识模型,能够有效识别高速公路的易发生事故或拥堵的脆弱路段,快速定位高速公路重大应急需求的关键路段。其次,本发明实施例基于关键路段的位置数据建立无人机机场布设模型,通过canopy算法与k-means算法的融合加快了布设模型的求解速度,有效提高了突发事件下的应急救援响应效率。此外,本发明实施例构建多类型空地检测器协同布设优化模型,采用非支配麻雀搜索算法求解该模型的帕累托最优解,解决了多目标加权算法难以确定权重系数的问题。生成的空地检测器布设方案,突破了传统地面检测器无法对道路进行全面监测且突发事件下响应速度慢的局限性,显著提高了高速公路交通网络感知的时空覆盖率和应急响应效率。
- 还没有人留言评论。精彩留言会获得点赞!