一种基于混驾环境的智能汽车行驶规划系统
本发明涉及汽车行驶监管,具体是一种基于混驾环境的智能汽车行驶规划系统。
背景技术:
1、随着城市化进程的加快,道路交通压力日益增大,混驾环境日益普遍,目前在进行混驾环境的道路车辆监管时,往往只能通过摄像头对相应道路进行监控以提供基础的交通监控功能;
2、在实际运用过程中,无法实现对车辆行为的实时分析并合理进行车辆的路权分配管控,不利于提高道路交通效率和安全性,导致交通拥堵、事故风险等问题频发,智能化程度低且加大了道路监管难度;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于提供一种基于混驾环境的智能汽车行驶规划系统,解决了现有技术无法实现对车辆行为的实时分析并合理进行车辆的路权分配管控,智能化程度低且加大了道路监管难度,难以提高交通效率和安全性的问题。
2、为实现上述目的,本发明提供如下技术方案:
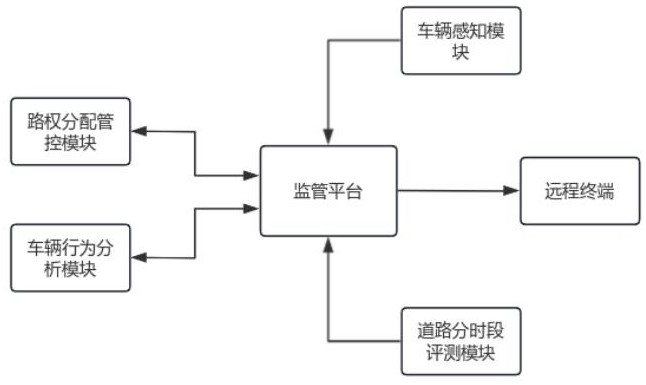
3、一种基于混驾环境的智能汽车行驶规划系统,包括监管平台、车辆感知模块、车辆行为分析模块、路权分配管控模块、道路分时段评测模块和远程终端;监管平台获取到所需进行监管的道路并将其标记为监控道路,车辆感知模块用于获取监控道路上车辆的行驶信息,且将车辆的行驶信息经监管平台发送至车辆行为分析模块;
4、车辆行为分析模块基于车辆的行驶信息并利用机器学习算法和行为识别技术对车辆行为进行分析,捕捉到相应车辆的需管控行为,且将相应车辆的需管控行为发送至路权分配管控模块;其中,需管控行为包括超速、变道和减速;路权分配管控模块基于车辆的所有需管控行为并通过分析以将相应车辆标记为高路权车辆或低路权车辆,动态调整相应车辆在监控道路的行驶权限和速度限制,且将相应车辆的标记信息经监管平台发送至远程终端;
5、在进行速度限制调整时使低路权车辆的速度上限阈值小于高路权车辆的速度上限阈值,以及在进行行驶权限调整时通过道路分时段评测模块设定天数为y1的评测周期,并在每日设定若干个通行时段,每个通行时段的时长相同,通过分时段道路监评分析以将对应通行时段标记为致堵时段或易行时段,且将相应通行时段的标记信息经监管平台发送至路权分配管控模块和远程终端,路权分配管控模块在致堵时段禁止部分低路权车辆进入监控道路。
6、进一步的,路权分配管控模块的具体运行过程包括:
7、设定天数为l1的路权评估周期,采集到路权评估周期内相应车辆在监控道路上的行驶速度超过其预设行驶速度阈值的总时长并将其标记为速超时检值,且采集到路权评估周期内相应车辆在监控道路上的行驶速度超过其预设行驶速度阈值的单次持续时长并将其标记为速超持时值,将速超持时值与预设速超持时阈值进行数值比较,若速超持时值超过预设速超持时阈值,则将对应速超持时值标记为速超持表值,且将路权评估周期内相应车辆的速超持表值的数量标记为速超频表值;
8、以及通过变道检测分析以得到相应车辆的变道评析值,且通过减速全流程监管分析以得到相应车辆的减速监管值,通过将相应车辆的速超时检值、速超频表值、变道评析值和减速监管值进行数值计算得到路权评估值,获取到相应车辆路权评估周期内相应车辆在监控道路上的行驶总时长,将路权评估值与行驶总时长的比值标记为路权占估值;
9、将路权评估值和路权占估值与预设路权评估阈值和预设路权占估阈值分别进行数值比较,若路权评估值或路权占估值超过对应预设阈值,则将相应车辆标记为监控道路的低路权车辆;若路权评估值和路权占估值均未超过对应预设阈值,则将相应车辆标记为监控道路的高路权车辆。
10、进一步的,变道检测分析的具体分析过程如下:
11、在相应车辆于监控道路的行驶过程中设定若干个检测时段,采集到检测时段内相应车辆进行变道的次数并将其标记为变道频率,将变道频率与预设变道频率阈值进行数值比较,若变道频率超过预设变道频率阈值,则将对应检测时段标记为变道风险时段;获取到路权评估周期内相应车辆在监控道路的所有变道风险时段,且将变道风险时段的数量标记为变道评析值。
12、进一步的,减速全流程监管分析的具体分析过程如下:
13、获取到路权评估周期内相应车辆在监控道路上的所有减速状态,将对应减速状态的结束时刻与开始时刻进行时间差计算得到减速时长,采集到减速时长内相应车辆的车速下降值,并将车速下降值与减速时长的比值标记为减速险测值;将减速险测值与预设减速险测阈值进行数值比较,若减速险测值超过预设减速险测阈值,则将对应减速状态标记为急降状态;
14、若减速险测值未超过预设减速险测阈值,则采集到减速时长内相应车辆的速度曲线,将速度曲线置入位于第一象限的直角坐标系中,且直角坐标系的x轴为时间、y轴为车速;获取到速度曲线上的所有转折点,且将连接相邻两组转折点的线段标记为降表线段,在直角坐标系中作平行于x轴且与降表线段相交的水平直线并将其标记为横表直线,将横表直线与相应降表线段之间所形成的锐角标记为车辆降率值;
15、通过将相应减速状态的所有车辆降率值进行均值计算得到车辆降况值,将数值最大的车辆降率值标记为车辆降幅值,将车辆降况值和车辆降幅值与预设车辆降况阈值和预设车辆降幅阈值分别进行数值比较,若车辆降况值或车辆降幅值超过对应预设阈值,则将对应减速状态标记为急降状态;获取到路权评估周期内相应车辆在监控道路上的急降状态的总次数并将其标记为减速监管值。
16、进一步的,分时段道路监评分析的具体分析过程如下:
17、采集到监控道路在检测时点的拥堵路段数量并将其标记为拥堵数检值,以及将所有拥堵路段的拥堵长度进行求和计算以得到拥堵距检值,通过将拥堵数检值和拥堵距检值进行数值计算得到拥堵系数;获取到监控道路在相应日期对应通行时段中所有检测时点的拥堵系数并建立拥堵集合,将拥堵集合进行均值计算和方差计算以得到拥堵表现值和拥堵差异值,将拥堵表现值和拥堵差异值与预设拥堵表现值和预设拥堵差异阈值分别进行数值比较,若拥堵表现值超过预设拥堵表现阈值且拥堵差异值未超过预设拥堵差异阈值,则判断监控道路在相应日期对应通行时段处于高堵状态;若拥堵表现值未超过预设拥堵表现阈值且拥堵差异值未超过预设拥堵差异阈值,则判断监控道路在相应日期对应通行时段处于低堵状态;
18、其余情况则将拥堵集合中超过预设拥堵系数阈值的子集数量的占比值标记为过堵检测值,通过将过堵检测值与拥堵表现值进行数值计算得到堵塞评判值,将堵塞评判值与预设堵塞评判值范围进行数值比较,若堵塞评判值超过预设堵塞评判值范围的最大值,则判断监控道路在相应日期对应通行时段处于高堵状态;若堵塞评判值未超过预设堵塞评判值范围的最小值,则判断监控道路在相应日期对应通行时段处于低堵状态;若堵塞评判值位于预设堵塞评判值范围内,则判断监控道路在相应日期对应通行时段处于中堵状态。
19、进一步的,在判断监控道路在相应日期对应通行时段处于高堵状态、中堵状态或低堵状态后,获取到评测周期内监控道路在相应通行时段处于高堵状态的天数、处于中堵状态的天数和处于低堵状态的天数并将其分别标记为高堵况表值、中堵况表值和低堵况表值,通过将高堵况表值、中堵况表值和低堵况表值进行数值计算得到堵析值;
20、将堵析值与预设堵析阈值进行数值比较,若堵析值超过预设堵析阈值,则将对应通行时段标记为致堵时段;若堵析值未超过预设堵析阈值,则将对应通行时段标记为易行时段。
21、进一步的,监管平台与通行险测模块通信连接,通行险测模块获取到监控道路上的所有车辆,将对应车辆标记为i,且i为大于1的自然数;通过行险检测分析以生成车辆i的行驶高险信号或行驶低险信号,并将行驶高险信号经监管平台发送至车辆i的车载终端,车辆i的车载终端接收到行驶高险信号时发出相应预警。
22、进一步的,行险检测分析的具体分析过程如下:
23、采集到车辆i距离其前方车辆的距离值并将其标记为近距值,以及采集到车辆i与其前方车辆的距离缩小速度并将其标记为距缩值,将近距值与距缩值的比值标记为速险值,将速险值与预设速险阈值进行数值比较,若速险值未超过预设速险阈值,则生成车辆i的行驶高险信号;
24、若速险值超过预设速险阈值,则采集到车辆i的晃动幅度并将其标记为行驶晃检值,以及采集到车辆i所处环境的能见度数据,并将车辆i相较于其所处车道的边线的最小距离值标记为边距检测值,通过将车辆i的速险值、行驶晃检值、能见度数据和边距检测值进行数值计算得到行险评估值,将行险评估值与预设行险评估阈值进行数值比较,若行险评估值超过预设行险评估阈值,则生成车辆i的行驶高险信号;若行险评估值未超过预设行险评估阈值,则生成车辆i的行驶低险信号。
25、与现有技术相比,本发明的有益效果是:
26、1、本发明中,通过车辆感知模块获取监控道路上车辆的行驶信息,车辆行为分析模块基于车辆的行驶信息对车辆行为进行分析,路权分配管控模块通过分析将相应车辆标记为高路权车辆或低路权车辆,在进行速度限制调整时使低路权车辆的速度上限阈值小于高路权车辆的速度上限阈值,并在致堵时段禁止部分低路权车辆进入监控道路,通过实时分析车辆行为并对车辆的路权进行合理分配管控,提高道路通行效率和安全性,智能化程度高,显著降低对道路交通的监管难度并提升其管理效果;
27、2、本发明中,通过通行险测模块获取到监控道路上的所有车辆,通过行险检测分析以生成相应车辆的行驶高险信号或行驶低险信号,并将行驶高险信号经监管平台发送至相应车辆的车载终端,相应车辆的车载终端接收到行驶高险信号时发出相应预警,及时提醒相应驾驶人员作出合理的调整措施,以有效保证相应车辆的行驶安全,进一步降低提高道路通行风险性。
- 还没有人留言评论。精彩留言会获得点赞!