基于目标检测技术的交通参数提取方法及相关装置
本发明涉及一种基于目标检测技术的交通参数提取方法及相关装置,属于图像识别与交通运行管理。
背景技术:
1、智能交通系统是一种综合应用信息技术和通信技术的交通管理系统,旨在提高交通效率、减少交通拥堵、增强交通安全和改善交通环境。它利用现代通信、传感、计算和控制技术,将交通设施、交通工具和交通管理有机地结合起来,实现交通信息的采集、处理、传输和利用。车道级交通参数是进行交通运行情况分析,交通优化方案制定的基础,能够为智能交通管理和服务提供更精细的支持,在工程实际中有着重要的作用。然而使用人工计数统计或利用浮动车法进行车道级交通参数的采集费时费力,成本高,难以得到广泛的使用,因此现在急需一种新的车道级交通参数获取方法。
技术实现思路
1、本发明提供了一种基于目标检测技术的交通参数提取方法及相关装置,解决饿了背景技术中披露的问题。
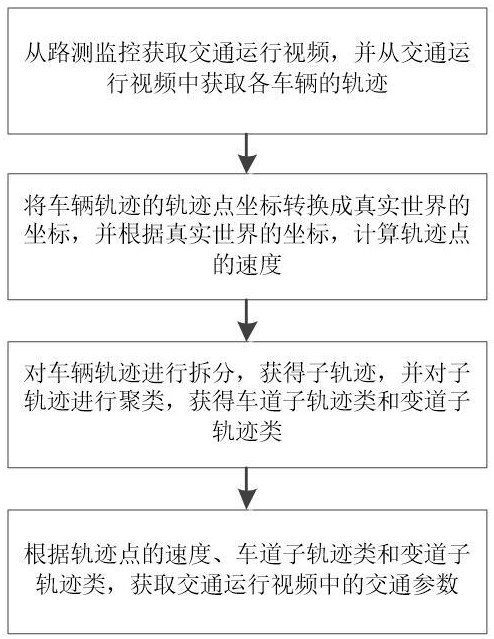
2、根据本公开的一个方面,提供一种基于目标检测技术的交通参数提取方法,包括:从路测监控获取交通运行视频,并从交通运行视频中获取各车辆的轨迹;将车辆轨迹的轨迹点坐标转换成真实世界的坐标,并根据真实世界的坐标,计算轨迹点的速度;对车辆轨迹进行拆分,获得子轨迹,并对子轨迹进行聚类,获得车道子轨迹类和变道子轨迹类;根据轨迹点的速度、车道子轨迹类和变道子轨迹类,获取交通运行视频中的交通参数。
3、在本公开的一些实施例中,从交通运行视频中获取各车辆的轨迹,包括:逐帧读取交通运行视频,采用transtrack模型,获取各车辆的轨迹;其中,在transtrack模型中,采用跟踪框的分布区间代替跟踪框具体位置,采用检测框的分布区间代替检测框具体位置,利用匈牙利算法代替跟踪框与检测框的交并比指标匹配方法。
4、在本公开的一些实施例中,依次采用预先获取的坐标转换矩阵和坐标旋转矩阵进行坐标转换;
5、其中,获取坐标转换矩阵的过程包括:从路测监控获取包含标定板的图像,并提取图像中的标定板上的角点坐标;根据角点坐标、与角点坐标对应的真实世界坐标、以及路测监控的摄像机内外参数,获得坐标转换矩阵;
6、坐标旋转矩阵为将真实世界坐标的x轴旋转至垂直交通运行视频内标定的车道方向、将真实世界坐标的y轴旋转至平行交通运行视频内标定的车道方向。
7、在本公开的一些实施例中,对子轨迹进行聚类,获得车道子轨迹类和变道子轨迹类,包括:对子轨迹进行聚类,获得多个子轨迹类;针对每个子轨迹类,随机抽取子轨迹类中的部分子轨迹,将随机抽取的子轨迹作为代表轨迹,若大于a1%的代表轨迹为沿车道方向的子轨迹,则判定该子轨迹类为车道子轨迹类,若不大于a1%的代表轨迹为沿车道方向的子轨迹,则判定该子轨迹类为变道子轨迹类;其中,a1%为第一阈值。
8、在本公开的一些实施例中,判断代表轨迹为沿车道方向的子轨迹过程为:若代表轨迹中大于a2%的轨迹点的速度夹角在[-θ,θ]内,则判定代表轨迹为代表轨迹为沿车道方向的子轨迹;其中,轨迹点的速度夹角为轨迹点的速度方向与车道中线的夹角,θ为速度夹角上限,a2%为第二阈值。
9、在本公开的一些实施例中,根据轨迹点的速度、车道子轨迹类和变道子轨迹类,获取交通运行视频中的交通参数,包括:根据车道子轨迹类中的车辆id数量,获得每分钟车道的流量;根据变道子轨迹类中的车辆id数量,获得每分钟车道间进行变道的流量;根据车道子轨迹类中在每分钟内轨迹点对应速度的均值,获得每分钟车道平均车速;根据变道子轨迹类中在每分钟内轨迹点对应速度的均值,获得每分钟车道间变道平均车速;根据车道子轨迹类中每帧的轨迹点数量,获得每分钟车道的排队长度均值;根据车道子轨迹类中的车辆id第一次出现时间,获得每分钟车道中的平均车头时距。
10、根据本公开的另一个方面,提供一种基于目标检测技术的交通参数提取装置,包括:
11、视频轨迹模块,从路测监控获取交通运行视频,并从交通运行视频中获取各车辆的轨迹;
12、速度模块,将车辆轨迹的轨迹点坐标转换成真实世界的坐标,并根据真实世界的坐标,计算轨迹点的速度;
13、聚类模块,对车辆轨迹进行拆分,获得子轨迹,并对子轨迹进行聚类,获得车道子轨迹类和变道子轨迹类;
14、交通参数模块,根据轨迹点的速度、车道子轨迹类和变道子轨迹类,获取交通运行视频中的交通参数。
15、在本公开的一些实施例中,视频轨迹模块中,从交通运行视频中获取各车辆的轨迹,包括:逐帧读取交通运行视频,采用transtrack模型,获取各车辆的轨迹;其中,在transtrack模型中,采用跟踪框的分布区间代替跟踪框具体位置,采用检测框的分布区间代替检测框具体位置,利用匈牙利算法代替iou匹配。
16、根据本公开的另一个方面,提供一种计算机可读存储介质,计算机可读存储介质存储一个或多个程序,一个或多个程序包括指令,指令当由计算设备执行时,使得计算设备执行基于目标检测技术的交通参数提取方法。
17、根据本公开的另一个方面,提供一种计算机设备,包括一个或多个处理器、以及一个或多个存储器,一个或多个程序存储在一个或多个存储器中并被配置为由一个或多个处理器执行,一个或多个程序包括用于执行基于目标检测技术的交通参数提取方法的指令。
18、本发明所达到的有益效果:本发明从路测监控获取稳定视角下交通运行视频,通过坐标转换方式将视频中的车辆轨迹点坐标转换为真实世界坐标,从而可获得轨迹点的速度,通过对车辆轨迹拆分、聚类,获得不同的子轨迹类,根据轨迹点的速度和不同的子轨迹类获取车道级交通参数,该方法可直接通过程序实现,相较于传统的人工计数统计或利用浮动车法,更加省时省力,成本低,便于广泛使用。
技术特征:
1.基于目标检测技术的交通参数提取方法,其特征在于,包括:
2.根据权利要求1所述的基于目标检测技术的交通参数提取方法,其特征在于,从交通运行视频中获取各车辆的轨迹,包括:
3.根据权利要求1所述的基于目标检测技术的交通参数提取方法,其特征在于,依次采用预先获取的坐标转换矩阵和坐标旋转矩阵进行坐标转换;
4.根据权利要求1所述的基于目标检测技术的交通参数提取方法,其特征在于,对子轨迹进行聚类,获得车道子轨迹类和变道子轨迹类,包括:
5.根据权利要求4所述的基于目标检测技术的交通参数提取方法,其特征在于,判断代表轨迹为沿车道方向的子轨迹过程为:
6.根据权利要求1所述的基于目标检测技术的交通参数提取方法,其特征在于,根据轨迹点的速度、车道子轨迹类和变道子轨迹类,获取交通运行视频中的交通参数,包括:
7.基于目标检测技术的交通参数提取装置,其特征在于,包括:
8.根据权利要求7所述的基于目标检测技术的交通参数提取装置,其特征在于,视频轨迹模块中,从交通运行视频中获取各车辆的轨迹,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储一个或多个程序,一个或多个程序包括指令,指令当由计算设备执行时,使得计算设备执行权利要求1~6任一所述的方法。
10.一种计算机设备,其特征在于,包括:
技术总结
本发明公开了一种基于目标检测技术的交通参数提取方法及相关装置,本发明从路测监控获取稳定视角下交通运行视频,通过坐标转换方式将视频中的车辆轨迹点坐标转换为真实世界坐标,从而可获得轨迹点的速度,通过对车辆轨迹拆分、聚类,获得不同的子轨迹类,根据轨迹点的速度和不同的子轨迹类获取车道级交通参数,该方法可直接通过程序实现,相较于传统的人工计数统计或利用浮动车法,更加省时省力,成本低,便于广泛使用。
技术研发人员:郭延永,江典峰,吕浩,岳全胜,周继彪,吴秀梅,罗元炜,陈晓薇
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!