激光器的波长调整方法及计算设备与流程
本发明涉及激光器波长定位领域,具体一种激光器的波长调整方法及计算设备。
背景技术:
1、准分子激光器运行的时候,会有一些特定的业务场景,如波长校准起始和终点位置定位,波长运动固定位置测试波长分辨率等需求。在这种情况下,需要优先关注波长运动到特定位置的时间,其次才是定位准确度。
2、而使用经典自动控制模式对波长进行控制的时候,需要电机有足够的反应速度和运动误差。这对电机的性能提出了比较高的要求。在实际的工作场景下,对波长定位进行pid控制时,受限于上位机和电机的通讯时间以及电机闭环定位的反应时间,实现波长快速定位需要较长的时间。但是在另外一些应用场景,如果对波长定位精度要求不是特别高但是需要在较短的时间定位到确定位置的时候,则需要换一种控制模式来实现。
技术实现思路
1、本发明要解决的技术问题在于,克服现有的技术的不足,提供一种激光器的波长调整方法及计算设备,能够较为快速地实现激光器的波长的调整和定位。
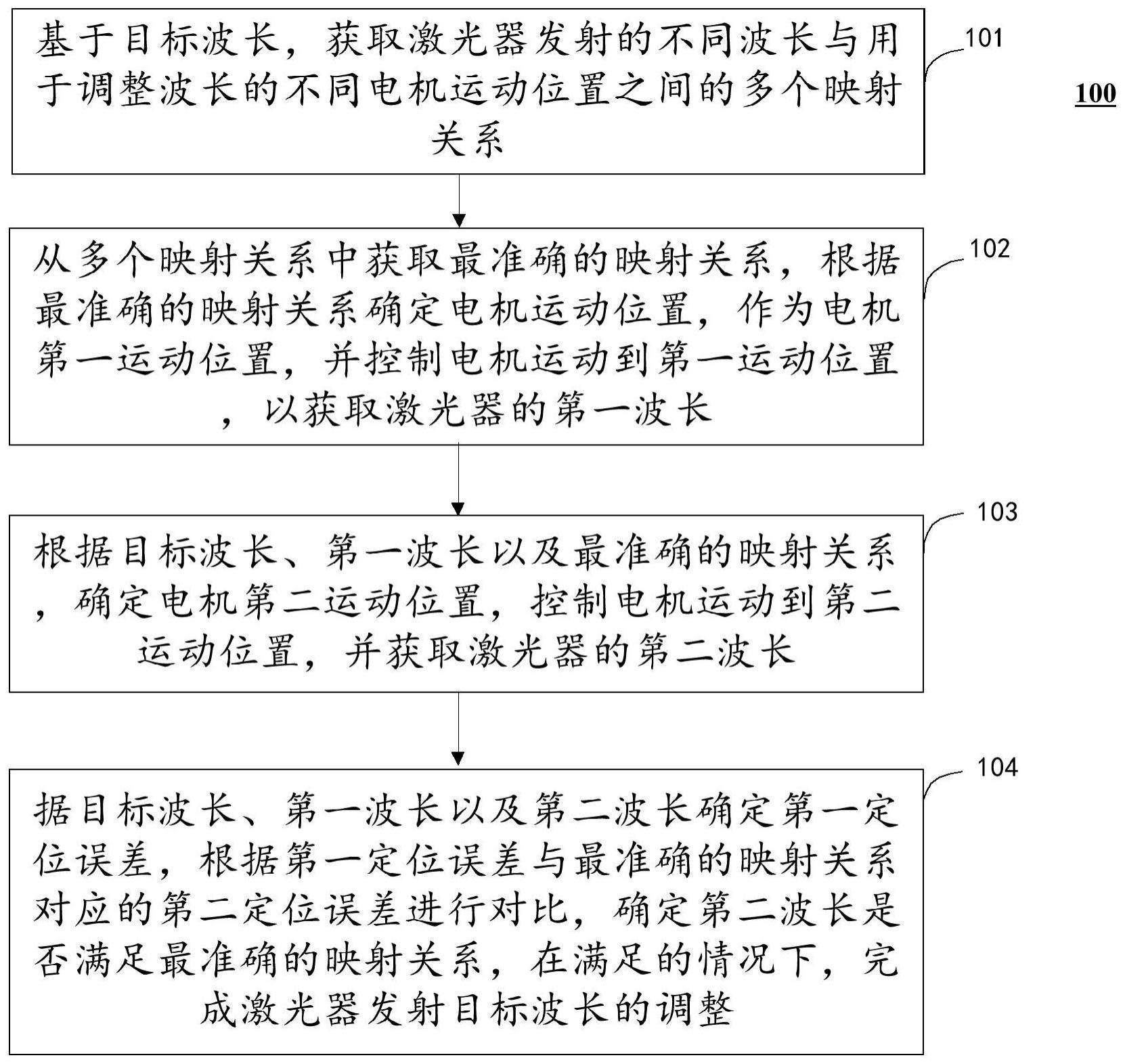
2、为达到上述技术目的,一方面,本发明提供的一种激光器的波长调整方法,包括:基于目标波长,获取激光器发射的不同波长与用于调整波长的不同电机运动位置之间的多个映射关系;从所述多个映射关系中获取最准确的映射关系,根据最准确的映射关系确定电机运动位置,作为电机第一运动位置,并控制电机运动到第一运动位置,以获取激光器的第一波长;根据目标波长、第一波长以及最准确的映射关系,确定电机第二运动位置,控制电机运动到第二运动位置,并获取激光器的第二波长;根据所述目标波长、第一波长以及第二波长确定第一定位误差,根据所述第一定位误差与最准确的映射关系对应的第二定位误差进行对比,确定第二波长是否满足最准确的映射关系,在满足的情况下,完成激光器发射目标波长的调整。
3、此外,该方法还包括:在不满足的情况下,根据目标波长、第二波长以及第二运动位置确定映射关系的修正偏差;根据所述修正偏差修正所述最准确的映射关系。
4、此外,该方法还包括;获取多个映射关系中每个映射关系对应的激光器发射的当前波长、电机运动位置、发射的当前波长与目标波长之间的差值以及定位误差;将映射关系、以及映射关系对应的激光器发射的当前波长、电机运动位置、发射的当前波长与目标波长之间的差值和定位误差记录在记录表中,以使从所述记录表中获取所需映射关系、对应的激光器发射的当前波长、电机运动位置、发射的当前波长与目标波长之间的差值和/或定位误差。
5、具体的,所述从所述多个映射关系中获取最准确的映射关系,包括:根据多个映射关系从记录表中对应的多个波长差值中确定最小波长差值,将最小波长差值对应的映射关系作为最精准的映射关系,所述波长差值是指目标波长与激光器发射的当前波长之间的差值。
6、具体的,所述根据目标波长、第一波长以及最准确的映射关系,确定电机第二运动位置,包括:根据所述目标波长与第一波长确定第一波长差值;根据所述第一波长差值与最准确的映射关系的比值确定位置偏差;根据所述位置偏差与第一运动位置确定电机第二运动位置。
7、具体的,所述根据所述目标波长、第一波长以及第二波长确定第一定位误差,包括:根据所述目标波长与所述第一波长确定第一波长差值;根据所述目标波长以及所述第二波长确定第二波长差值;根据所述第二波长差值与所述第一波长差值的比值确定第一定位误差。
8、具体的,所述根据所述第一定位误差与最准确的映射关系对应的第二定位误差进行对比,确定第二波长是否满足最准确的映射关系,包括:当所述第一定位误差小于或等于所述第二定位误差,则确定第二波长满足最准确的映射关系;当所述第一定位误差大于所述第二定位误差,则确定第二波长不满足最准确的映射关系。
9、具体的,所述根据目标波长、第二波长以及第二运动位置确定映射关系的修正偏差,包括:根据所述目标波长以及所述第二波长确定第二波长差值;根据第二波长差值以及第二运动位置确定映射关系的修正偏差。
10、此外,该方法还包括:在不满足的情况下,将修正后的映射关系,以及修正后的映射关系对应的激光器发射的当前波长、电机运动位置、发射的当前波长与目标波长之间的差值和定位误差增加到记录表中。
11、另一方面,本发明提供的一种计算设备,包括:处理器、存储器;所述存储器,用于存储计算设备中的程序;所述处理器,执行存储器中的程序,以用于:基于目标波长,获取激光器发射的不同波长与用于调整波长的不同电机运动位置之间的多个映射关系;从所述多个映射关系中获取最准确的映射关系,根据最准确的映射关系确定电机运动位置,作为电机第一运动位置,并控制电机运动到第一运动位置,以获取激光器的第一波长;根据目标波长、第一波长以及最准确的映射关系,确定电机第二运动位置,控制电机运动到第二运动位置,并获取激光器的第二波长;根据所述目标波长、第一波长以及第二波长确定第一定位误差,根据所述第一定位误差与最准确的映射关系对应的第二定位误差进行对比,确定第二波长是否满足最准确的映射关系,在满足的情况下,完成激光器发射目标波长的调整。
12、在本申请实施例中,基于目标波长,获取激光器发射的不同波长与用于调整波长的不同电机运动位置之间的多个映射关系;从多个映射关系中获取最准确的映射关系,根据最准确的映射关系确定电机运动位置,作为电机第一运动位置,并控制电机运动到第一运动位置,以获取激光器的第一波长;根据目标波长、第一波长以及最准确的映射关系,确定电机第二运动位置,控制电机运动到第二运动位置,并获取激光器的第二波长;根据目标波长、第一波长以及第二波长确定第一定位误差,根据第一定位误差与最准确的映射关系对应的第二定位误差进行对比,确定第二波长是否满足最准确的映射关系,在满足的情况下,完成激光器发射目标波长的调整。能够快速地实现激光器的波长调整和定位。
技术特征:
1.一种激光器的波长调整方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述方法还包括;
4.根据权利要求1述的方法,其特征在于,所述从所述多个映射关系中获取最准确的映射关系,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据目标波长、第一波长以及最准确的映射关系,确定电机第二运动位置,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述目标波长、第一波长以及第二波长确定第一定位误差,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述第一定位误差与最准确的映射关系对应的第二定位误差进行对比,确定第二波长是否满足最准确的映射关系,包括:
8.根据权利要求2所述的方法,其特征在于,所述根据目标波长、第二波长以及第二运动位置确定映射关系的修正偏差,包括:
9.根据权利要求2所述的方法,其特征在于,所述方法还包括:
10.一种计算设备,其特征在于,包括:处理器、存储器;
技术总结
本申请实施例提供一种激光器的波长调整方法及计算设备。在本申请实施例中,基于目标波长,获取激光器发射的不同波长与用于调整波长的不同电机运动位置之间的多个映射关系;获取最准确的映射关系,并确定电机运动位置,作为第一运动位置,控制电机运动到第一运动位置,以获取第一波长;根据目标波长、第一波长以及最准确的映射关系,确定电机第二运动位置,控制电机运动到第二运动位置,并获取第二波长;根据目标波长、第一波长以及第二波长确定第一定位误差,根据第一定位误差与第二定位误差进行对比,确定第二波长是否满足最准确的映射关系,在满足的情况下,完成激光器发射目标波长的调整。能够快速地实现激光器的波长调整和定位。
技术研发人员:王香,冯泽斌,刘广义,李娟娟,袁海涛,梁赛,徐向宇,江锐
受保护的技术使用者:北京科益虹源光电技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!