适用于半导体设备前置模块的晶圆清洁装置及清洁方法与流程
本发明涉及半导体生产,具体涉及一种适用于半导体设备前置模块的晶圆清洁装置及清洁方法。
背景技术:
1、在半导体工艺中需要晶圆来进行生产,在实际生产中为了移动晶圆,一般是现移动至晶圆运输机器人上,再通过晶圆运输机器人移动到进行晶圆处理的腔室内。
2、在生产中,晶圆背面可能会因为细小微粒而发生变形导致工艺低良率,为了解决晶圆背面因为细小异物质在工艺过程可能导致的问题,需要对晶圆背面进行清洁,但是如果增加额外的清洁设备会导致工艺流程臃肿,甚至可能引入新的问题。
技术实现思路
1、本发明所要解决的技术问题是晶圆背面存在异物,目的在于提供一种适用于半导体设备前置模块的晶圆清洁装置及清洁方法,实现了在移动的过程中对晶圆背面进行清洁的功能。
2、本发明通过下述技术方案实现:
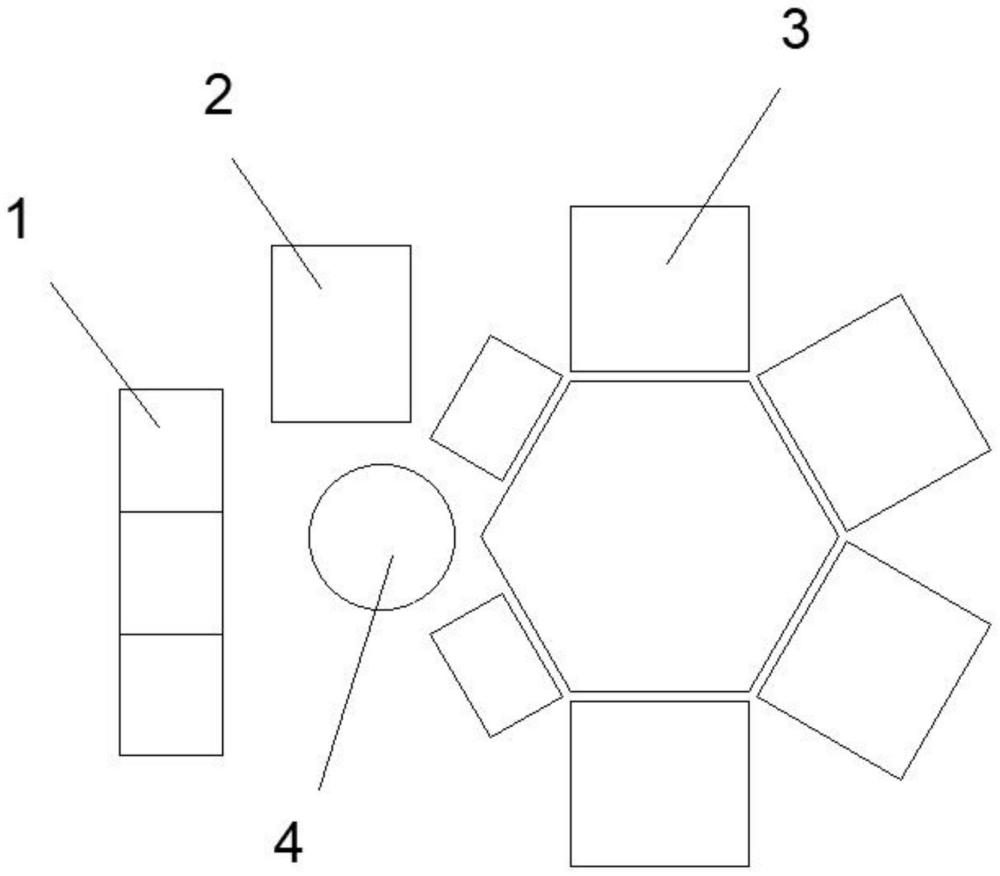
3、第一方面,一种适用于半导体设备前置模块的晶圆清洁装置,所述半导体设备前置模块包括:
4、晶圆传送盒,其放置有多个晶圆;
5、晶圆对准站;
6、晶圆处理单元,其用于对晶圆进行处理;
7、晶圆运输机器人,其用于将晶圆从所述晶圆传送盒移动至所述晶圆对准站,还用于将晶圆从所述晶圆对准站移动至所述晶圆处理单元,还用于将晶圆从所述晶圆处理单元移出;
8、所述清洁装置包括:
9、晶圆清洁组件,其固定设置在所述晶圆运输机器人上,晶圆的背面与所述晶圆清洁组件贴合。
10、可选地,所述晶圆运输机器人包括:
11、运输机械臂;
12、机器人铲刀,其与所述运输机械臂的末端连接,且所述晶圆清洁组件设置在所述机器人铲刀的上侧面,晶圆置于所述晶圆清洁组件上。
13、可选地,所述晶圆清洁组件为覆盖在所述机器人铲刀上的清洁垫,晶圆的背面与所述清洁垫的上侧面接触,所述清洁垫对所述晶圆的背面进行清洁。
14、具体地,所述清洁垫的形状与所述机器人铲刀的形状匹配。
15、可选地,所述晶圆清洁装置还包括:
16、垫体清洁组件,其设置在所述晶圆运输机器人的一侧,且用于对应所述清洁垫进行清洁。
17、可选地,所述垫体清洁组件包括负压吸附装置,其负压口与所述清洁垫相接,且吸附位于所述清洁垫上的异物。
18、第二方面,一种适用于半导体设备前置模块的晶圆清洁方法,基于如上述的一种适用于半导体设备前置模块的晶圆清洁装置,所述方法包括:
19、第一步,控制运输机械臂,使晶圆运输机器人将机器人铲刀移动至晶圆传送盒处,并将机器人铲刀插入至晶圆下方;
20、第二步,移动机器人铲刀至晶圆对准站,在晶圆对准站中对晶圆进行对准;
21、第三步,移动机器人铲刀至晶圆处理单元,控制运输机械臂,将机器人铲刀与晶圆分离,在晶圆处理单元中对晶圆进行处理;
22、第四步,控制运输机械臂,使机器人铲刀移动至晶圆处理单元,并将机器人铲刀插入至晶圆下方;
23、第五步,将移动机器人铲刀将晶圆从晶圆处理单元移出;
24、其中,在第二步、第三步和第五步中,晶圆贴合在所述清洁垫上,清洁垫对晶圆的背面进行清洁。
25、可选地,在第二步中,移动机器人铲刀至晶圆对准站的过程中,控制运输机械臂在水平面上抖动,晶圆与清洁垫在水平面上发生相对移动。
26、可选地,在第五步中,移动机器人铲刀从晶圆处理单元移出时和移除后,控制运输机械臂在水平面上抖动,晶圆与清洁垫在水平面上发生相对移动。
27、进一步,检测清洁垫的清洁度,若清洁垫的清洁度低于设定值,则通过垫体清洁组件对清洁垫进行清洁。
28、本发明与现有技术相比,具有如下的优点和有益效果:
29、本发明通过晶圆运输机器人将晶圆在晶圆传送盒、晶圆对准站和晶圆处理单元之间移动,并通过将晶圆清洁组件安装在晶圆运输机器人上,实现在晶圆运输机器人运输晶圆的过程中,即对晶圆进行清洁,不需要增加额外的清洁设备,在现有的半导体前置模块上即可安装。
技术特征:
1.一种适用于半导体设备前置模块的晶圆清洁装置,其特征在于,所述半导体设备前置模块包括:
2.根据权利要求1所述的一种适用于半导体设备前置模块的晶圆清洁装置,其特征在于,所述晶圆运输机器人(4)包括:
3.根据权利要求2所述的一种适用于半导体设备前置模块的晶圆清洁装置,其特征在于,所述晶圆清洁组件(42)为覆盖在所述机器人铲刀(41)上的清洁垫,晶圆的背面与所述清洁垫的上侧面接触,所述清洁垫对所述晶圆的背面进行清洁。
4.根据权利要求3所述的一种适用于半导体设备前置模块的晶圆清洁装置,其特征在于,所述清洁垫的形状与所述机器人铲刀(41)的形状匹配。
5.根据权利要求3所述的一种适用于半导体设备前置模块的晶圆清洁装置,其特征在于,所述晶圆清洁装置还包括:
6.根据权利要求5所述的一种适用于半导体设备前置模块的晶圆清洁装置,其特征在于,所述垫体清洁组件包括负压吸附装置,其负压口与所述清洁垫相接,且吸附位于所述清洁垫上的异物。
7.一种适用于半导体设备前置模块的晶圆清洁方法,其特征在于,基于如权利要求6所述的一种适用于半导体设备前置模块的晶圆清洁装置,所述方法包括:
8.根据权利要求7所述的一种适用于半导体设备前置模块的晶圆清洁方法,其特征在于,在第二步中,移动机器人铲刀(41)至晶圆对准站(2)的过程中,控制运输机械臂在水平面上抖动,晶圆与清洁垫在水平面上发生相对移动。
9.根据权利要求7所述的一种适用于半导体设备前置模块的晶圆清洁方法,其特征在于,在第五步中,移动机器人铲刀(41)从晶圆处理单元(3)移出时和移除后,控制运输机械臂在水平面上抖动,晶圆与清洁垫在水平面上发生相对移动。
10.根据权利要求7所述的一种适用于半导体设备前置模块的晶圆清洁方法,其特征在于,检测清洁垫的清洁度,若清洁垫的清洁度低于设定值,则通过垫体清洁组件对清洁垫进行清洁。
技术总结
本发明公开了一种适用于半导体设备前置模块的晶圆清洁装置及清洁方法,半导体设备前置模块包括晶圆传送盒、晶圆对准站、晶圆处理单元和晶圆运输机器人,晶圆运输机器人用于将晶圆从晶圆传送盒移动至晶圆对准站,还用于将晶圆从晶圆对准站移动至晶圆处理单元,还用于将晶圆从晶圆处理单元移出;清洁装置包括晶圆清洁组件,其固定设置在晶圆运输机器人上,晶圆的背面与晶圆清洁组件贴合;本发明通过晶圆运输机器人将晶圆在晶圆传送盒、晶圆对准站和晶圆处理单元之间移动,并通过将晶圆清洁组件安装在晶圆运输机器人上,实现在晶圆运输机器人运输晶圆的过程中,即对晶圆进行清洁,不需要增加额外的清洁设备,在现有的半导体前置模块上即可安装。
技术研发人员:金建澔
受保护的技术使用者:成都高真科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!