基于图像融合的晶圆预对准系统
本发明属于晶圆预对准,尤其涉及一种基于图像融合的晶圆预对准系统。
背景技术:
1、晶圆预对准系统主要有两种,机械式预对准系统和光学预对准系统。机械式预对准系统是用复杂的机构直接接触晶圆,使其被动定位。由于其精度主要取决于机械设计制造精度和光电检测结构的精度,因此只能满足0.35毫米以上的设备,主要应用于传输精度要求较低的微米级设备中。
2、机械式预对准系统具有成本低、控制系统和算法简单等优点。但它同时有精度较低、直接接触晶圆容易对硅片造成污染、机械结构复杂等缺点,因此逐渐被淘汰。随着计算机和机器视觉的快速发展,近来对光学预对准系统的研究与开发已成为主流。
3、光学预对准系统是用光学检测仪器配合简单的直线运动机构实现晶圆的高精度定位,它集晶圆的全位置边缘检测和中心定位于一体,也能通过特定的算法实现缺口拟合及检测,或者是切边检测与定位,光学预对准系统由光学检测仪器(通常为工业相机)检测晶圆不同位置的轮廓、通过记录的轮廓信息实现轮廓的如何,从而得到晶圆的中心偏移量以及边缘或缺口的位置,并将其传送给系统的控制器,用简单的机构经过直线和旋转运动实现晶圆的定位。光学式预对准系统与晶圆无接触,因此不易污染或损坏晶圆,正逐渐成为主流系统,但传统的预对准系统采用ccd相机提取轮廓,受环境影响较大,且成本高昂,难以得到广泛应用。
技术实现思路
1、为了解决现有技术所存在的问题和缺陷,本发明提出了一种基于普通工业相机获取偏心与缺口或切边的方法。通过工业相机与伺服电机的配合实现晶圆不同位置的采样,通过轮廓周长的变化分析当前是否处于缺口或切边位置,将采集到的晶圆不同位置处的图像进行边界提取处理,得到晶圆不同角度处的轮廓信息,通过相机大量获取晶圆轮廓信息,结合位置信息实现晶圆轮廓的拼接,最终获取晶圆的偏心与缺口或切边信息。
2、本发明的目的还在于设计一套基于视觉的晶圆预定位系统,用于满足晶圆加工前的缺口或切边对齐与偏心矫正,使其能适应不同尺寸的晶圆对心,通过沿x/y轴的与伺服电机相连丝杆实现旋转台在x/y轴方向的位移,以实现不同尺寸晶圆的边缘采样,通过对旋转台相连的伺服电机与相机的同步控制(c轴的旋转),实现多次晶圆的全轮廓采样,对采集的照片进行轮廓提取并结合其位置信息进行拼接融合,最终得到晶圆的完整轮廓。
3、本发明解决其技术问题采用的技术方案是:
4、一种基于图像融合的晶圆预对准系统,其特征在于,包括:x、y两个平动轴和一个与气泵相连的c轴;第一伺服电机控制x方向的运动,用于实现机床坐标系到相机坐标系的转化,第二伺服电机控制c轴的旋转从而带动晶圆的运动,第三伺服电机控制y轴的运动,用于适应不同尺寸的晶圆,保证晶圆轮廓始终处于相机视野中。
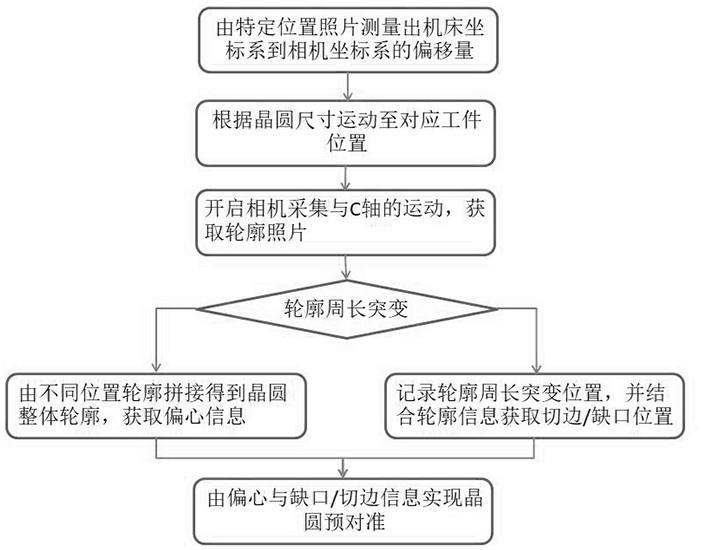
5、进一步地,其预对准过程包括以下步骤:
6、步骤s1:测量机床坐标系到相机坐标系的偏移量;
7、步骤s2:根据晶圆尺寸控制工业相机移动至晶圆的位置;
8、步骤s3:开启相机采集和c轴运动,从而获取晶圆轮廓照片:当c轴旋转时,工业相机同步采集晶圆的轮廓信息,上位机对采集到的照片进行轮廓提取,从而得到晶圆不同位置的轮廓,根据多个位置的轮廓信息调用opencv进行轮廓拼接,输出晶圆的偏心信息;
9、步骤s4:记录工业相机每一张图像的轮廓周长,由轮廓周长的突变位置获得缺口位置,记录此时c轴的电机位置;对采集到的图像进行霍夫变换,判断图像是直边还是弧线,若为弧线即记录对象的位置信息;将偏心信息与缺口或切边位置传给上位机,上位机通过偏差信息控制伺服电机运动对应距离,以实现晶圆的预对准。
10、进一步地,步骤s1具体包括以下步骤:
11、步骤s11:通过相机支架连接工业相机,将其抬升至适当的位置,使待对准的晶圆轮廓在相机中成清晰的像,并对成像进行标定,通过张正友标定法获取镜头的内外参;
12、步骤s12:对获取的图像进行修正,以获取更加准确的图像;再确定像素比例,即多少个像素代表实际1mm,通过伺服电机控制工业相机移动一定距离,并对图像中的对应像素点移动距离进行计算以获取像素比例;
13、步骤s13:通过相机与伺服电机的联动,计算出相机坐标系与电机坐标系的相对位置,选择尺寸精确的标定板,让其处于相机视野中,进行拍照取样,并获取当前标定板的倾斜度,根据倾斜度控制电机旋转至水平或竖直位置,记录水平或竖直位置的尺寸;
14、步骤s14:将标定板旋转180°,测量旋转后的标定板倾斜度,根据倾斜度进行微调,测量微调后的水平或竖直位置尺寸,将两次的尺寸结合相机的初步轴线位置进行比例计算,以获取相机坐标系与电机坐标系的位置关系。
15、与现有设计相比,本发明及其优选方案能够实现更为精准的偏心计算,每一个位置的轮廓信息都是像素级别的,必然会带来极高的预对准精度,与此同时,通过简单的运动系统搭配电机位置读取指令,实现了以前全双工通信设备下的照片与位置信息对应关系,开发成本更低,产品更加具备技术竞争力。
技术特征:
1.一种基于图像融合的晶圆预对准系统,其特征在于,包括:x、y两个平动轴和一个与气泵相连的c轴;第一伺服电机控制x方向的运动,用于实现机床坐标系到相机坐标系的转化,第二伺服电机控制c轴的旋转从而带动晶圆的运动,第三伺服电机控制y轴的运动,用于适应不同尺寸的晶圆,保证晶圆轮廓始终处于相机视野中。
2.根据权利要求1所述的基于图像融合的晶圆预对准系统,其特征在于:预对准过程包括以下步骤:
3.根据权利要求2所述的基于图像融合的晶圆预对准系统,其特征在于,步骤s1具体包括以下步骤:
技术总结
本发明提出一种基于图像融合的晶圆预对准系统,通过工业相机与伺服电机的配合实现晶圆不同位置的采样,通过轮廓周长的变化分析当前是否处于缺口或切边位置,将采集到的晶圆不同位置处的图像进行边界提取处理,得到晶圆不同角度处的轮廓信息,通过相机大量获取晶圆轮廓信息,结合位置信息实现晶圆轮廓的拼接,最终获取晶圆的偏心与缺口或切边信息。
技术研发人员:陈剑雄,王鑫,叶德康,黄朝凯
受保护的技术使用者:福州大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!