一种移动滑环线路机构的制作方法
本技术涉及机械自动化,具体地说,本技术涉及一种移动滑环线路机构。
背景技术:
1、在环形运动装置中,有沿环形回转的多个运动模组,每个运动模组往往会装有电气元器件,由于运动模组一直在循环回转运动,气管和线缆如果与运动模组一起随动,则会发生打结、扯断等问题,造成设备损失以及安全事故。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种安全稳定的移动滑环线路机构。
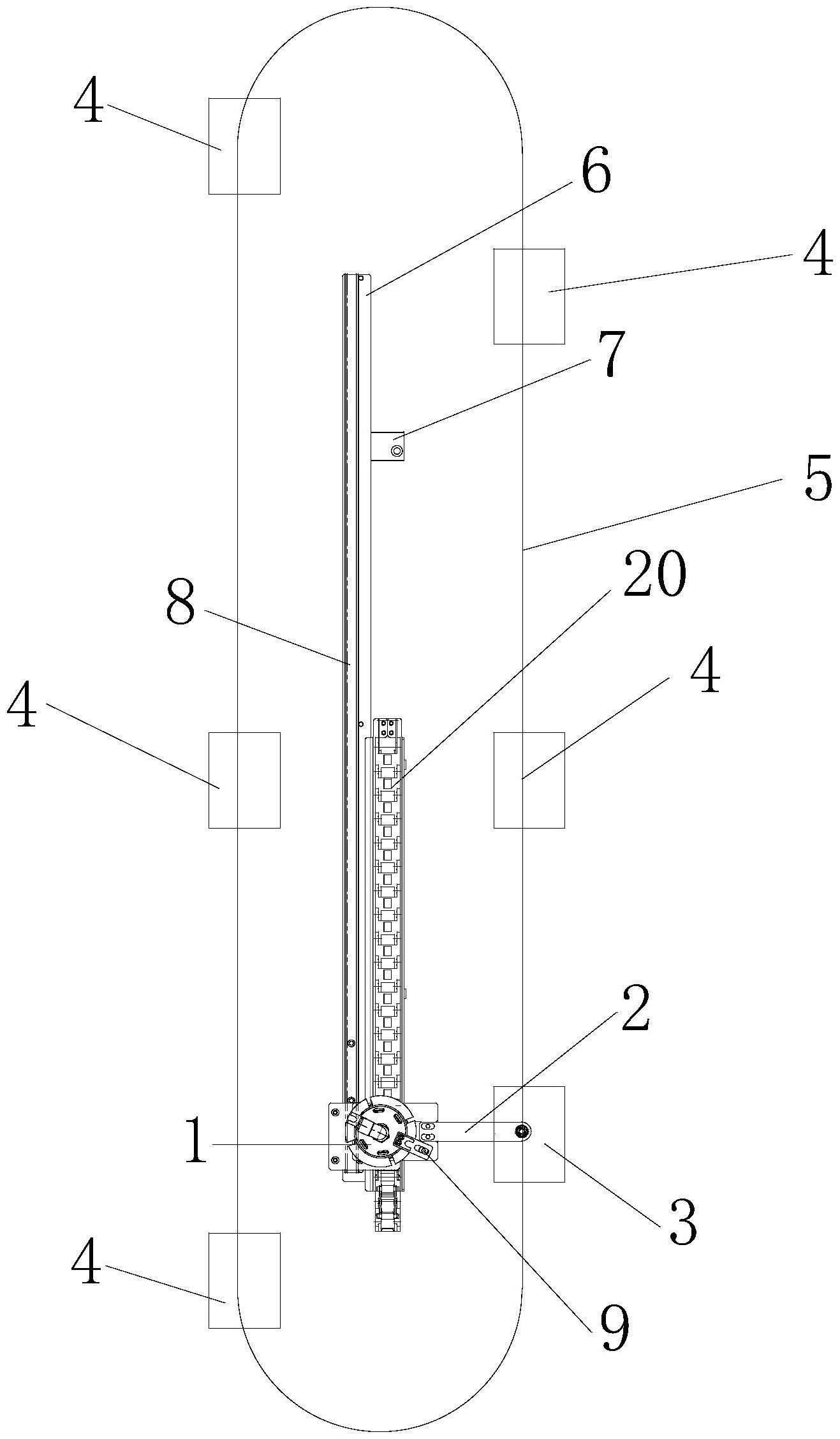
2、本实用新型解决其技术问题所采用的技术方案是:一种移动滑环线路机构,其改进之处在于:包括移动模组、滑环、连接模组、运动轨道、第一运动模组以及多个第二运动模组;
3、所述连接模组连接滑环和第一运动模组,第一运动模组移动时通过连接模组带动滑环在移动模组上移动;多个第二运动模组上的气管以及线缆固定汇总于第一运动模组处并与滑环连接,第一运动模组与多个第二运动模组在运动轨道上移动且第一运动模组与滑环的距离始终保持一致,连接模组可在第一运动模组移动时保持第一运动模组与滑环的距离固定。
4、上述技术方案中所述滑环包括滑环转子、滑环定子以及滑环固定轴,所述滑环定子安装于滑环转子内,滑环转子可相对滑环定子旋转,滑环定子固定安装于滑环固定轴上;所述连接模组包括连接杆以及连轴,滑环固定轴上套有轴承、套设于轴承外圈的旋转台以及连接滑环转子与旋转台的止动杆,连接杆水平与旋转台连接,连轴垂直连接于连接杆上,连轴与第一运动模组连接;所述滑环转子上设有气管接头,所述多个第二运动模组的进气口通过管接头连接于第一运动模组处,第一运动模组通过管接头与滑环转子上的气管接头连通;所述多个第二运动模组的线缆沿运动轨道布置后在第一运动模组处汇总,汇总后的线缆与滑环转子连接;所述的移动模组还包括拖链,所述滑环转子和滑环固定轴上设有同轴的通孔,线缆从滑环转子上的通孔进入,穿过滑环固定轴上的通孔后安装于拖链中。
5、上述技术方案中所述移动模组包括滑轨、导块、滑轨安装板以及安装板垫块,所述导块滑动安装于导轨上,滑环安装于导块上,滑轨安装于滑轨安装板上,滑轨安装板安装于安装板垫块上。
6、本实用新型的有益效果是:本实用新型通过将第一运动模组和多个第二运动模组的气管和线缆汇总于第一运动模组处然后与滑环连接,滑环通过连接模组与第一运动模组保持固定距离使得气管与线缆也始终保持固定状态,避免了发生打结、扯断等问题,使生产更加稳定安全。
技术特征:
1.一种移动滑环线路机构,其特征在于:包括移动模组、滑环、连接模组、运动轨道、第一运动模组以及多个第二运动模组;
2.根据权利要求1所述的一种移动滑环线路机构,其特征在于:所述滑环包括滑环转子、滑环定子以及滑环固定轴,所述滑环定子安装于滑环转子内,滑环转子可相对滑环定子旋转,滑环定子固定安装于滑环固定轴上。
3.根据权利要求2所述的一种移动滑环线路机构,其特征在于:所述连接模组包括连接杆以及连轴,滑环固定轴上套有轴承、套设于轴承外圈的旋转台以及连接滑环转子与旋转台的止动杆,连接杆水平与旋转台连接,连轴垂直连接于连接杆上,连轴与第一运动模组连接。
4.根据权利要求2所述的一种移动滑环线路机构,其特征在于:所述滑环转子上设有气管接头,所述多个第二运动模组的进气口通过管接头连接于第一运动模组处,第一运动模组通过管接头与滑环转子上的气管接头连通。
5.根据权利要求4所述的一种移动滑环线路机构,其特征在于:所述多个第二运动模组的线缆沿运动轨道布置后在第一运动模组处汇总,汇总后的线缆与滑环转子连接。
6.根据权利要求1所述的一种移动滑环线路机构,其特征在于:所述移动模组包括滑轨、导块、滑轨安装板以及安装板垫块,所述导块滑动安装于导轨上,滑环安装于导块上,滑轨安装于滑轨安装板上,滑轨安装板安装于安装板垫块上。
7.根据权利要求5所述的一种移动滑环线路机构,其特征在于:所述的移动模组还包括拖链,所述滑环转子和滑环固定轴上设有同轴的通孔,线缆从滑环转子上的通孔进入,穿过滑环固定轴上的通孔后安装于拖链中。
技术总结
本技术涉及一种移动滑环线路机构,涉及机械自动化技术领域;包括移动模组、滑环、连接模组、运动轨道、第一运动模组以及多个第二运动模组;所述连接模组连接滑环和第一运动模组,第一运动模组移动时通过连接模组带动滑环在移动模组上移动;多个第二运动模组上的气管以及线缆固定汇总于第一运动模组处并与滑环连接,第一运动模组与多个第二运动模组在运动轨道上移动且第一运动模组与滑环的距离始终保持一致,连接模组可在第一运动模组移动时保持第一运动模组与滑环的距离固定。本技术的有益效果在于:在运动模组移动的状态下保持气管及线缆为静止状态,避免出现打结及扯断的现象。
技术研发人员:周玉望,施伟,明文建,刘章文,于程亮
受保护的技术使用者:广东嘉拓自动化技术有限公司
技术研发日:20221117
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!