一种数控机器人手臂用的线束的制作方法
本技术属于线束,更具体地说,特别涉及一种数控机器人手臂用的线束。
背景技术:
1、机器人手臂是指机械臂,机械臂是一个多输入多输出、高度非线性和强耦合的复杂系统,因其独特的操作灵活性,已在工业装配和安全防爆等领域得到广泛应用,机械臂是一个复杂系统,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位置。
2、线束为一定负载源组提供服务设备的总体,如中继线路、交换装置和控制系统等,但是用在数控机器人上的线束,由于数控机器人的线束较多,该线束再长距离连接后,线束中的多个线缆会部分缠绕在一起,在日常维护过程中不便于进行理线等,同时也不便对线束进行更好的分类,多个线束容易散乱或造成磨损,牢固性相对较差,遇到故障时不便快速准确地找到对应线路的问题。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种数控机器人手臂用的线束,以期达到更具有更加实用价值性的目的。
技术实现思路
1、为了解决上述技术问题,本实用新型提供一种数控机器人手臂用的线束,以解决现在的机械臂连接线束无法更好的分类,并且由于线条过多,在维修起来非常麻烦的问题。
2、本实用新型一种数控机器人手臂用的线束的目的与功效,由以下具体技术手段所达成:
3、一种数控机器人手臂用的线束,包括线缆和整理板,所述线缆设置有多组,多组所述线缆均穿过所述整理板,所述整理板的底端内侧壁上开设有第二凹孔,所述第二凹孔设置有多个,多个所述第二凹孔呈等距分布,所述第二凹孔与所述线缆相适配,所述第二凹孔的侧面上固定有第一软胶层a,所述第二凹孔的正上方设置有第一夹持组件,所述第一夹持组件的两端设置有两个呈对称分布的第二夹持组件,所述整理板的外侧壁固定有两个呈对称分布的凸板,所述凸板上开设有装配孔。
4、进一步的,所述第一夹持组件包括与整理板的顶端螺纹连接的丝杆,所述丝杆贯穿整理板的顶端侧壁,所述丝杆的底端固定有轴承,所述丝杆的底端通过轴承转动连接有卡块,所述卡块的底端侧面上开设有与第二凹孔相配合的第一凹孔,所述第一凹孔侧面上贴合固定有第一软胶层。
5、进一步的,所述第二夹持组件包括与卡块两端固定的凸块,所述凸块顶端侧面上固定有卡槽,所述整理板的侧壁上开设有两个呈对称分布的滑动槽,所述凸块与滑动槽滑动贴合,所述卡槽内固定有与滑动槽顶端侧面固定的压簧。
6、进一步的,所述压簧设置有多个,多个所述压簧呈等距分布。
7、进一步的,所述第一软胶层a和第一软胶层相靠近的侧面上均固定有球形块,所述球形块设置有多个,多个所述球形块呈等距分布。
8、进一步的,所述丝杆的顶端固定有旋动块,所述旋动块的侧面上固定有凸条,所述凸条设置有多个且呈环形分布。
9、与现有技术相比,本实用新型的有益效果是:
10、1、本实用新型中对线束进行辅助夹持固定时,将多根线束从第一软胶层a内穿出放置到第一软胶层a上,转动下旋丝杆,丝杆带动卡块进行向下移动,卡块带动第一软胶层下移压紧贴合到线束的侧面上,从而将放置在第一软胶层和第一软胶层a之间的多根线束进行同时固定夹紧,对多根线束进行固定,提高线束固定的稳固性,避免线束受外力拉扯,造成线束扭动脱出的问题,有效提高了线束固定的可靠性,同时也便于对多个线束内的线缆进行分类整理,使线束更加整洁,便于后续日常维护和检修,具有较好的实用性。
11、2、本实用新型中当卡块向下移动时,卡块带动凸块在滑动槽内滑动下移,滑动槽对凸块的移动进行限位,压簧拉伸进行复原,当第一软胶层压合到线束的侧面上时,压簧压动凸块两端向下,使得卡块两端位置的线束得到辅助压紧,进一步提高了对线束进行加持时的稳定性,使得线束得到更好归纳整理,线缆之间不易扭曲缠绕,提高了该线束在使用时的便捷性和牢固性。
技术特征:
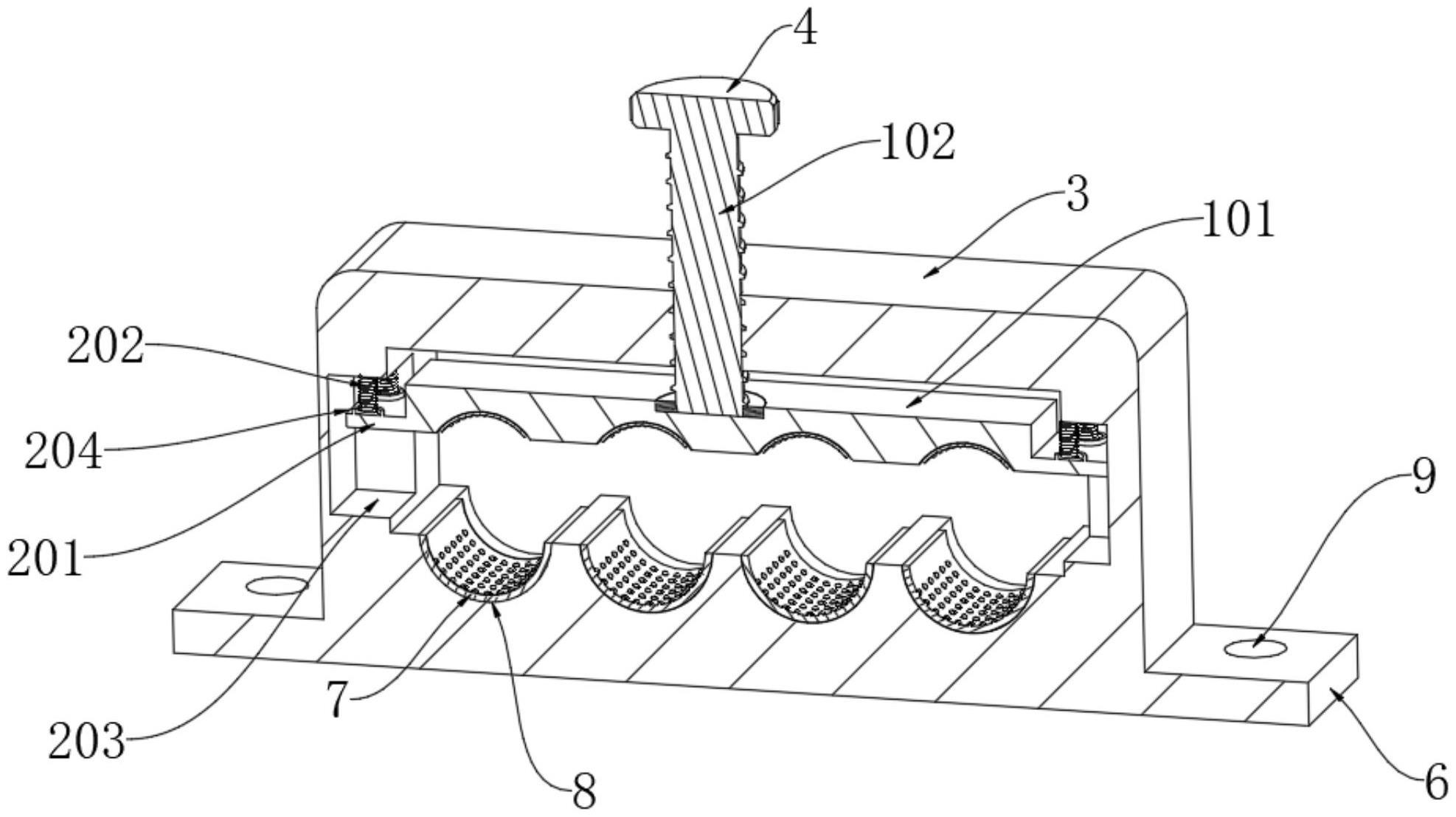
1.一种数控机器人手臂用的线束,包括线缆(11)和整理板(3),所述线缆(11)设置有多组,多组所述线缆(11)均穿过所述整理板(3),其特征在于,所述整理板(3)的底端内侧壁上开设有第二凹孔(8),所述第二凹孔(8)设置有多个,多个所述第二凹孔(8)呈等距分布,所述第二凹孔(8)与所述线缆(11)相适配,所述第二凹孔(8)的侧面上固定有第一软胶层a(7),所述第二凹孔(8)的正上方设置有第一夹持组件(1),所述第一夹持组件(1)的两端设置有两个呈对称分布的第二夹持组件(2),所述整理板(3)的外侧壁固定有两个呈对称分布的凸板(6),所述凸板(6)上开设有装配孔(9)。
2.根据权利要求1所述的一种数控机器人手臂用的线束,其特征在于,所述第一夹持组件(1)包括与整理板(3)的顶端螺纹连接的丝杆(102),所述丝杆(102)贯穿整理板(3)的顶端侧壁,所述丝杆(102)的底端固定有轴承(103),所述丝杆(102)的底端通过轴承(103)转动连接有卡块(101),所述卡块(101)的底端侧面上开设有与第二凹孔(8)相配合的第一凹孔(104),所述第一凹孔(104)侧面上贴合固定有第一软胶层(105)。
3.根据权利要求2所述的一种数控机器人手臂用的线束,其特征在于,所述第二夹持组件(2)包括与卡块(101)两端固定的凸块(201),所述凸块(201)顶端侧面上固定有卡槽(204),所述整理板(3)的侧壁上开设有两个呈对称分布的滑动槽(203),所述凸块(201)与滑动槽(203)滑动贴合,所述卡槽(204)内固定有与滑动槽(203)顶端侧面固定的压簧(202)。
4.根据权利要求3所述的一种数控机器人手臂用的线束,其特征在于,所述压簧(202)设置有多个,多个所述压簧(202)呈等距分布。
5.根据权利要求2所述的一种数控机器人手臂用的线束,其特征在于,所述第一软胶层a(7)和第一软胶层(105)相靠近的侧面上均固定有球形块(10),所述球形块(10)设置有多个,多个所述球形块(10)呈等距分布。
6.根据权利要求2所述的一种数控机器人手臂用的线束,其特征在于,所述丝杆(102)的顶端固定有旋动块(4),所述旋动块(4)的侧面上固定有凸条(5),所述凸条(5)设置有多个且呈环形分布。
技术总结
本技术提供一种数控机器人手臂用的线束,包括线缆和整理板,线缆设置有多组,多组线缆均穿过整理板,整理板的底端内侧壁上开设有第二凹孔,第二凹孔设置有多个,多个第二凹孔呈等距分布,第二凹孔与线缆相适配,第二凹孔的侧面上固定有第一软胶层a,第二凹孔的正上方设置有第一夹持组件,第一夹持组件的两端设置有两个呈对称分布的第二夹持组件,整理板的外侧壁固定有两个呈对称分布的凸板,凸板上开设有装配孔;本技术提高了线束固定的稳固性,避免线束受外力拉扯,造成线束扭动脱出的问题,有效提高了线束固定的可靠性,同时也便于对多个线束内的线缆进行分类整理,使线束更加整洁,便于后续日常维护和检修,具有较好的实用性。
技术研发人员:时海军,周平,刘阳雪
受保护的技术使用者:襄阳司方德电子有限公司
技术研发日:20221214
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!