用于确定晶圆传输设备的定位精度的方法与流程
本公开涉及半导体晶圆传输领域,更具体地涉及一种确定晶圆传输设备的定位精度的方法。
背景技术:
1、随着半导体领域的火热发展,国内厂家如井喷般出现了诸多半导体设备厂家,在国产化替代的路上,如何以更高效,更简便,更低的成本来测定各种晶圆传输设备的精度就显得尤为重要。
2、目前的精度测量方法主要是采用以下几种:一是激光干涉仪测定的方法,该方法的问题在于:1.设备专业性高,对操作人员技术要求高;2.成本高昂且操作复杂;3.极易受外界环境干扰,环境要求苛刻。二是多组相机拍照测定的方法,该方法的问题在于:1.相机系统的冗余会导致误差增大,且容易受装配人员装配技术的限制;2.多组相机之间安装的水平度、角度差异都会对测试精度造成极大的干扰,比如相机安装时的水平面是否一致,相机的拍摄角度是否有偏差,相机的视场是否相同等,这些都会对最终的数据造成难以规避的误差。
技术实现思路
1、本公开的目的在于提供一种改进的用于确定晶圆传输设备的定位精度的方法。
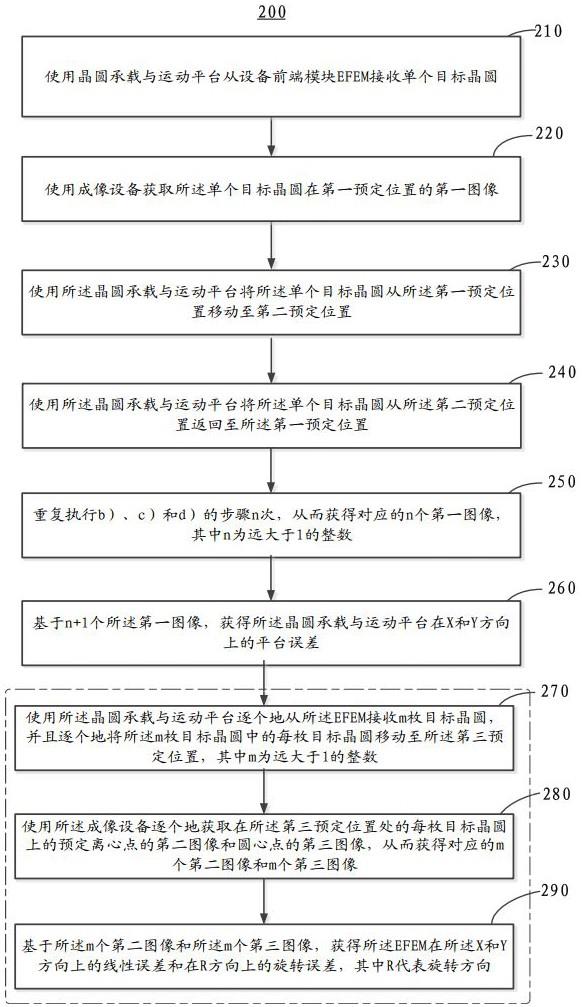
2、根据本公开的第一方面,提供了一种确定晶圆传输设备的定位精度的方法,该方法包括:a)使用晶圆承载与运动平台从设备前端模块efem接收单个目标晶圆;b)使用成像设备获取所述单个目标晶圆在第一预定位置的第一图像;c)使用所述晶圆承载与运动平台将所述单个目标晶圆从所述第一预定位置移动至第二预定位置;d)使用所述晶圆承载与运动平台将所述单个目标晶圆从所述第二预定位置返回至所述第一预定位置;e)重复执行b)、c)和d)的步骤n次,从而获得对应的n个第一图像,其中n为远大于1的整数;以及f)基于n+1个所述第一图像,获得所述晶圆承载与运动平台在x和y方向上的平台误差。
3、将会理解,通过以上方法,可以简单地获得晶圆承载与运动平台在x和y方向上的平台误差。
4、进一步地,在一些实施例中,该方法还包括: g)使用所述晶圆承载与运动平台逐个地从所述efem接收m枚目标晶圆,并且逐个地将所述m枚目标晶圆中的每枚目标晶圆移动至所述第三预定位置,其中m为远大于1的整数;h)使用所述成像设备逐个地获取在所述第三预定位置处的每枚目标晶圆上的预定离心点的第二图像和圆心点的第三图像,从而获得对应的m个第二图像和m个第三图像,其中所述预定离心点是指与对应目标晶圆的圆心点偏离的预定点;以及i)基于所述m个第二图像和所述m个第三图像,获得所述efem在所述x和y方向上的线性误差和在r方向上的旋转误差,其中r代表旋转方向。
5、将会理解,以这种方式,可以进一步简单地获得efem在所述x和y方向上的线性误差和在r方向上的旋转误差。
6、在一些实施例中,上述i)步骤包括: i1)分析所述m个第三图像中的圆心点的坐标,获得所述efem和所述晶圆承载与运动平台两者在x和y方向上的总圆心点线性误差;i2)基于所述总圆心点线性误差和所述平台误差两者,获得所述efem在所述x和y方向上的线性误差。
7、在一些实施例中,上述i2)步骤包括:将在所述x和y方向上的所述总圆心点线性误差减去在所述x和y方向上的对应的所述平台误差,以分别获得所述efem在所述x和y方向上的线性误差。
8、在一些实施例中,上述i)步骤还包括:i3)分析所述m个第二图像的所述预定离心点的坐标,以获得所述efem和所述晶圆承载与运动平台两者在x和y方向上的总离心点误差;i4)将所述总离心点误差减去所述总圆心点线性误差,以获得所述efem在所述r方向上的旋转误差。
9、在一些实施例中,上述i)步骤还包括:选取所述m个第二图像中的一个图像作为基准图像;获得所述第二图像中的每个其他图像的预定离心点(a’)相对于所述基准图像的预定离心点(b)的、在扣除了所述efem的所述线性误差之后的偏移距离;基于所述偏移距离,计算所述偏移距离所对应的圆心角,其中所述efem在所述r方向上的旋转误差由与所述其他图像对应的所述圆心角的最小值和最大值之间的区间表示。
10、在一些实施例中,上述i)步骤包括:标识每个第二图像上存在的预定直线;基于对每个第二图像上的所述预定直线的斜率分析,来获得所述efem在所述r方向上的旋转误差。
11、在一些实施例中,上述i)步骤包括:标识每个第二图像上存在的预定多边形的两个角点;确定所述两个角点的连线的斜率;基于对每个第二图像上的所述连线的斜率分析,来获得所述efem在所述r方向上的旋转误差。
12、在一些实施例中,所述第一预定位置为所述晶圆承载与运动平台最开始从所述efem接收所述单个目标晶圆的位置。
13、在一些实施例中,在上述e)步骤中,所述第二预定位置是可变的。
14、在一些实施例中,上述第三预定位置与所述第二预定位置彼此不同或相同。
15、在一些实施例中,上述n的数值大于30,所述m的数值大于30。
16、在一些实施例中,上述成像设备是单个相机。
17、根据本公开的第二方面,提供了一种晶圆处理设备。所述晶圆处理设备通过根据第一方面所述的方法来确定所述晶圆处理设备中的晶圆传输设备的定位精度。
18、根据本公开的第二方面,提供了一种计算机可读介质,其存储有计算机可读指令,所述指令在被处理器执行时,使得装置执行根据第一方面所述的方法。
19、还应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本公开的实施例的关键或重要特征,亦非用于限制本公开的范围。本公开实施例的其它特征将通过以下的描述变得容易理解。
技术特征:
1.一种确定晶圆传输设备的定位精度的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求2所述的方法,其特征在于,所述i)步骤包括:
4.根据权利要求3所述的方法,其特征在于,所述i2)步骤包括:
5.根据权利要求3-4中任一项所述的方法,其特征在于,所述i)步骤还包括:
6.根据权利要求3-4中任一项所述的方法,其特征在于,所述i)步骤还包括:
7.根据权利要求3-4中任一项所述的方法,其特征在于,所述i)步骤包括:
8.根据权利要求3-4中任一项所述的方法,其特征在于,所述i)步骤包括:
9.根据权利要求1至4中任一项所述的方法,其特征在于,所述第一预定位置为所述晶圆承载与运动平台最开始从所述efem接收所述单个目标晶圆的位置。
10.根据权利要求1至4中任一项所述的方法,其特征在于,在所述e)步骤中,所述第二预定位置是可变的。
11.根据权利要求2至4中任一项所述的方法,其特征在于,所述第三预定位置与所述第二预定位置彼此不同或相同。
12.根据权利要求2至4中任一项权利要求所述的方法,其特征在于,所述n的数值大于30,所述m的数值大于30。
13.根据权利要求2至4中任一项权利要求所述的方法,其特征在于,所述成像设备是单个相机。
14.一种晶圆处理设备,其特征在于,所述晶圆处理设备通过根据权利要求1-13中任一项所述的方法来确定所述晶圆处理设备中的晶圆传输设备的定位精度。
15.一种计算机可读介质,其存储有计算机可读指令,其特征在于,所述指令在被处理器执行时,使得装置执行根据权利要求1-13中任一项所述的方法。
技术总结
本公开各实施例提供了一种确定晶圆传输设备的定位精度的方法,该方法包括:a)使用晶圆承载与运动平台从设备前端模块EFEM接收单个目标晶圆;b)使用成像设备获取所述单个目标晶圆在第一预定位置的第一图像;c)使用晶圆承载与运动平台将所述单个目标晶圆从所述第一预定位置移动至第二预定位置;d)使用所述晶圆承载与运动平台将所述单个目标晶圆从所述第二预定位置返回至所述第一预定位置;e)重复执行b)、c)和d)的步骤n次,从而获得对应的n个第一图像,其中n为远大于1的整数;以及f)基于n+1个所述第一图像,获得所述晶圆承载与运动平台在X和Y方向上的平台误差。
技术研发人员:全鹏飞,邱青菊,韩景珊
受保护的技术使用者:睿励科学仪器(上海)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!