一种机器人手臂扭转电缆的制作方法
本发明涉及电缆,具体是一种机器人手臂扭转电缆。
背景技术:
1、机器人的出现是为了适应现代制造业的规模化生产,代替人工解决单调、重复的体力劳动,大幅提高生产质量和产量。目前出现全球性经济疲软,制造商们更希望利用工业机器人技术来帮助生产出更有竞争力的优质产品,进一步促进了机器人事业的迅猛发展。但是由于机器人工作方式的特殊性和工作环境的复杂性,对机器人使用的电缆都提出了特殊的要求,机器人专用的电缆应运而生。
2、机器人手臂在工作过程中需要反复的进行扭转和弯折操作,长时间的扭转或弯折会导致电缆的使用寿命降低,从而容易出现故障,导致机器人手臂无法正常工作,为了能够更好的使电缆应用于机器人手臂的扭转和弯折,为此我们提出了一种扭转电缆来解决该问题。
技术实现思路
1、本发明的目的在于提供一种机器人手臂扭转电缆,旨在解决现有技术中的机器人手臂在工作过程中需要反复的进行扭转和弯折操作,长时间的扭转或弯折会导致电缆的使用寿命降低,从而容易出现故障,导致机器人手臂无法正常工作的问题。
2、为实现上述目的,本发明采用如下技术方案:所述一种机器人手臂扭转电缆,包括:
3、第一套管;
4、第二套管;第二套管与第一套管间隔设置且位于同一轴线上,第二套管可相对于第一套管转动和/或弯折;
5、缆芯,从第一套管与第二套管之间穿过,且缆芯具有v形的扭转部位;
6、多个v形连接组件,v形连接组件沿着第一套管的周向设置,每个v形连接组件包括两个相互呈v形的转杆,两个转杆相互远离的一端分别与第一套管与第二套管转动连接,转杆相互靠近的一端转动连接,且相互靠近的一端连接有固定环,缆芯的扭转部位从固定环上穿过,第一套管转动和/或弯折时,缆芯的扭转部位的夹角随着与v形连接组件的夹角发生变化。
7、本发明的进一步的技术方案为,还包括连接管,所述连接管两端分别套设在第一套管和第二套管上。
8、本发明的进一步的技术方案为,还包括第一固定板与第二固定板,第一固定板与第一套管固定连接,第二固定板与第二套管固定连接,且第一固定板与第二固定板转动连接,使得第一套管能相对于第二套管弯折,还包括波纹管,波纹管套设在第一套管相对于第二套管外侧。
9、本发明的进一步的技术方案为,还包括转动安装在第一套管上的固定圈,第一固定板固定安装在固定圈上,使得第一套管能相对于第二套管转动和/或弯折。
10、本发明的进一步的技术方案为,所述第一套管与第二套管结构相同,都包括锥形段与环形段,锥形段内部形成有锥形腔,锥形腔的细口端形成有固定孔,缆芯穿过该固定孔,能够将多根缆芯紧密的固定在一起,环形段内侧形成有环腔,且环腔的内壁上沿其周向均布有多个缆芯通道,供缆芯穿过,并对缆芯进行限位。
11、本发明的进一步的技术方案为,所述第一套管和第二套管相对的外端分别设置有第一管套层、第二管套层,且第一管套层与第二管套层包裹在缆芯的外周侧。
12、本发明的进一步的技术方案为,所述连接组件包括固定座、固定环和两个转座,两个所述转座分别转动安装在第一套管和第二套管相对的内侧处,并且两个所述转座分别与两个所述转杆相远离的一端转动相连,两个所述转杆相靠近的一端均转动安装在固定座上,所述固定环与所述固定座转动相连,并且所述固定环与所述转杆分别位于所述固定座的两侧。
13、本发明的进一步的技术方案为,所述固定环的外周面包裹有一层海绵,对缆芯进行保护。
14、本发明的进一步的技术方案为,所述波纹管的材质为橡胶。
15、本发明的进一步的技术方案为,所述第一套管与第二套管的材质为pvc。
16、本发明的有益效果是:
17、该机器人手臂扭转电缆,缆芯具有扭转部位,扭转部位位于第一套管和第二套管之间,连接管内设有多个连接组件,多个连接组件均设于扭转间隙处,多个连接组件分别与多根缆芯一一对应的活动相连,以使在第一套管和第二套管发生相对转动时,位于扭转部位处的部分缆芯可以进行适应性的转动,能够有效避免缆芯之间产生摩擦或挤压,可以对电缆起到保护的作用。
技术特征:
1.一种机器人手臂扭转电缆,应用于机器人手臂(10)上,其特征在于,包括:
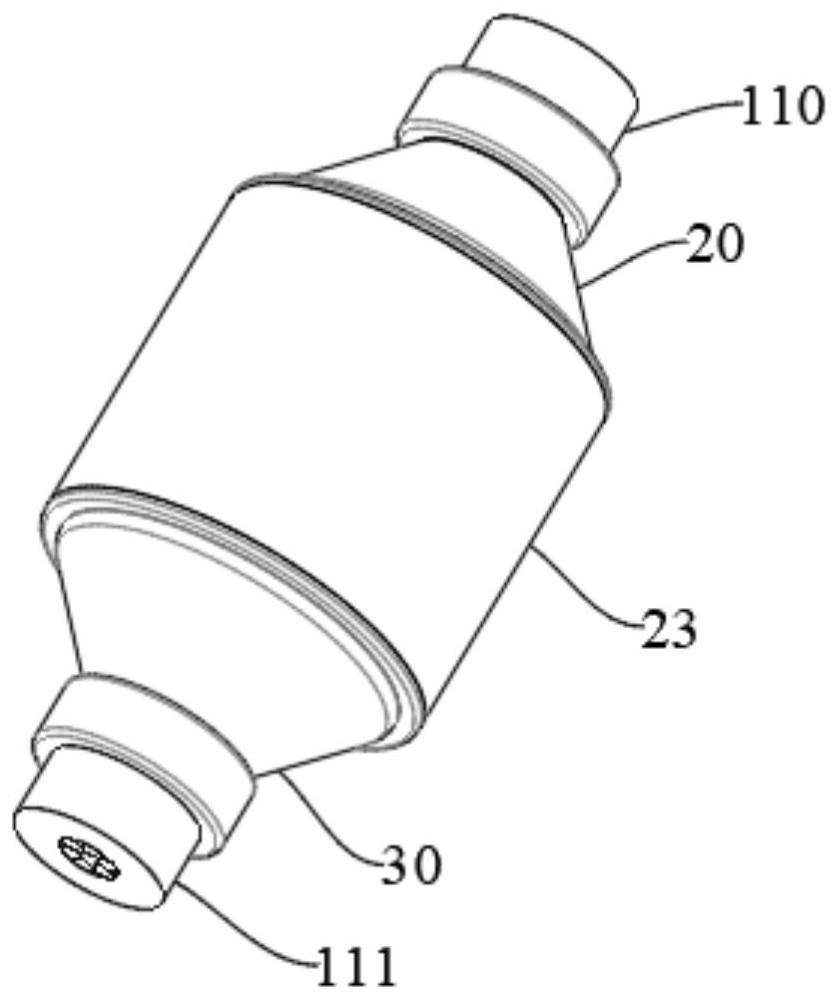
2.根据权利要求1所述的一种机器人手臂扭转电缆,其特征在于:还包括连接管(23),所述连接管(23)两端分别套设在第一套管(20)和第二套管(30)上。
3.根据权利要求1所述的一种机器人手臂扭转电缆,其特征在于:还包括第一固定板(51)与第二固定板(52),第一固定板(51)与第一套管(20)固定连接,第二固定板(52)与第二套管(30)固定连接,且第一固定板(51)与第二固定板(52)转动连接,使得第一套管(20)能相对于第二套管(30)弯折,还包括波纹管(50),波纹管(50)套设在第一套管(20)相对于第二套管(30)外侧。
4.根据权利要求3所述的一种机器人手臂扭转电缆,其特征在于:还包括转动安装在第一套管(20)上的固定圈(60),第一固定板(51)固定安装在固定圈(60)上,使得第一套管(20)能相对于第二套管(30)转动和/或弯折。
5.根据权利要求1-4任意一项所述的一种机器人手臂扭转电缆,其特征在于:所述第一套管(20)与第二套管(30)结构相同,都包括锥形段(21)与环形段(22),锥形段(21)内部形成有锥形腔,锥形腔的细口端形成有固定孔,缆芯(12)穿过该固定孔,能够将多根缆芯(12)紧密的固定在一起,环形段(22)内侧形成有环腔,且环腔的内壁上沿其周向均布有多个缆芯通道(24),供缆芯(12)穿过,并对缆芯(12)进行限位。
6.根据权利要求5所述的一种机器人手臂扭转电缆,其特征在于:所述第一套管(20)和第二套管(30)相对的外端分别设置有第一管套层(110)、第二管套层(111),且第一管套层(110)与第二管套层(111)包裹在缆芯(12)的外周侧。
7.根据权利要求5所述的一种机器人手臂扭转电缆,其特征在于:所述连接组件包括固定座(43)、固定环(44)和两个转座(40),两个所述转座分别转动安装在第一套管(20)和第二套管(30)相对的内侧处,并且两个所述转座(40)分别与两个所述转杆(41)相远离的一端转动相连,两个所述转杆(41)相靠近的一端均转动安装在固定座(43)上,所述固定环(44)与所述固定座(43)转动相连,并且所述固定环(44)与所述转杆(41)分别位于所述固定座(43)的两侧。
8.根据权利要求7所述的一种机器人手臂扭转电缆,其特征在于:所述固定环(44)的外周面包裹有一层海绵,对缆芯(12)进行保护。
9.根据权利要求4所述的一种机器人手臂扭转电缆,其特征在于:所述波纹管(50)的材质为橡胶。
10.根据权利要求8所述的一种机器人手臂扭转电缆,其特征在于:所述第一套管(20)与第二套管(30)的材质为pvc。
技术总结
本发明提供一种机器人手臂扭转电缆,涉及电缆技术领域,该一种机器人手臂扭转电缆,包括:第一套管、第二套管,第二套管与第一套管间隔设置且位于同一轴线上,第二套管可相对于第一套管转动和/或弯折;缆芯,从第一套管与第二套管之间穿过,且缆芯具有V形的扭转部位;本发明的有益效果:缆芯具有扭转部位,扭转部位位于第一套管和第二套管之间,连接管内设有多个连接组件,多个连接组件均设于扭转间隙处,多个连接组件分别与多根缆芯一一对应的活动相连,以使在第一套管和第二套管发生相对转动时,位于扭转部位处的部分缆芯可以进行适应性的转动,能够有效避免缆芯之间产生摩擦或挤压,可以对电缆起到保护的作用。
技术研发人员:李朋达
受保护的技术使用者:河南讯达电缆有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!