悬臂产品的焊线方法与流程
本发明涉及半导体封装,特指一种悬臂产品的焊线方法。
背景技术:
1、现有的半导体封装焊线制程,通常采用正向焊线线弧技术,使用传统正常控制参数,让劈刀高速撞击芯片后,劈刀针头输出超声波的热压合能量完成线弧的焊线连接动作。使用该焊线制程连接悬臂产品时,将会造成悬臂产品上的悬空部位处的焊线线弧有不稳定及脱落的异常,因此,亟需提供一种新的解决方案。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供一种悬臂产品的焊线方法,解决现有的焊线制程对悬臂产品进行焊线作业时造成悬空部位处的焊线线弧有不稳定及脱落的问题。
2、实现上述目的的技术方案是:
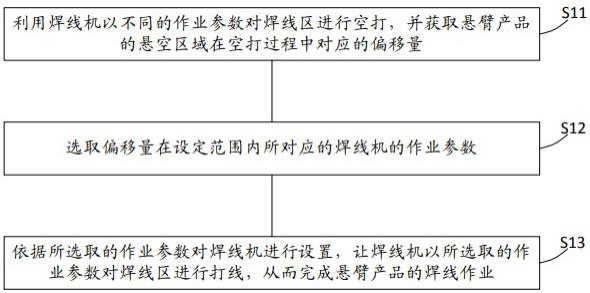
3、本发明提供了一种悬臂产品的焊线方法,所述悬臂产品的悬空区域内设有焊线区,所述焊线方法包括如下步骤:利用焊线机以不同的作业参数对所述焊线区进行空打,并获取所述悬臂产品的悬空区域在空打过程中对应的偏移量;选取偏移量在设定范围内所对应的焊线机的作业参数;以及依据所选取的作业参数对所述焊线机进行设置,让所述焊线机以所选取的作业参数对所述焊线区进行打线,从而完成悬臂产品的焊线作业。
4、本发明悬臂产品的焊线方法的进一步改进在于,在对所述悬臂产品进行焊线时,用球焊反打方式完成焊线作业。
5、本发明悬臂产品的焊线方法的进一步改进在于,还包括:建立偏移量与强制斜坡下降增益间对照关系表;选取偏移量在设定范围内所对应的强制斜坡下降增益,并将所选取强制斜坡下降增加对所述焊线机进行设置。
6、本发明悬臂产品的焊线方法的进一步改进在于,所述作业参数包括焊线机上劈刀的运行速度、超声波的功率以及焊线时间。
7、本发明悬臂产品的焊线方法的进一步改进在于,所述悬臂产品包括下部芯片和叠设于下部芯片的上部芯片,且所述上部芯片有部分凸伸出所述下部芯片进而形成所述悬空区域。
8、本发明悬臂产品的焊线方法的进一步改进在于,还包括:
9、设置位移传感器,利用所述位移传感器检测所述悬空区域的偏移量。
10、本发明悬臂产品的焊线方法的进一步改进在于,在打线过程中,让焊线机的超声波的能量输出呈阶梯式输出。
11、本发明的焊线方法的有益效果:在进行焊线作业前先对悬空区域的焊线区进行空打,通过检测空打过程中的偏移量找出最优的作业参数,让焊线机以最优的作业参数进行焊线,降低悬臂产品的悬空区域的上下晃动,进而提高焊线的稳定性,降低焊线线弧的脱落的概率。
技术特征:
1.一种悬臂产品的焊线方法,所述悬臂产品的悬空区域内设有焊线区,其特征在于,所述焊线方法包括如下步骤:
2.如权利要求1所述的悬臂产品的焊线方法,其特征在于,在对所述悬臂产品进行焊线时,用球焊反打方式完成焊线作业。
3.如权利要求1所述的悬臂产品的焊线方法,其特征在于,还包括:
4.如权利要求1所述的悬臂产品的焊线方法,其特征在于,所述作业参数包括焊线机上劈刀的运行速度、超声波的功率以及焊线时间。
5.如权利要求1所述的悬臂产品的焊线方法,其特征在于,所述悬臂产品包括下部芯片和叠设于下部芯片的上部芯片,且所述上部芯片有部分凸伸出所述下部芯片进而形成所述悬空区域。
6.如权利要求1所述的悬臂产品的焊线方法,其特征在于,还包括:
7.如权利要求1所述的悬臂产品的焊线方法,其特征在于,在打线过程中,让焊线机的超声波的能量输出呈阶梯式输出。
技术总结
本发明涉及半导体封装技术领域,特指一种悬臂产品的焊线方法,悬臂产品的悬空区域内设有焊线区,焊线方法包括如下步骤:利用焊线机以不同的作业参数对焊线区进行空打,并获取悬臂产品的悬空区域在空打过程中对应的偏移量;选取偏移量在设定范围内所对应的焊线机的作业参数;依据所选取的作业参数对焊线机进行设置,让焊线机以所选取的作业参数对焊线区进行打线,从而完成悬臂产品的焊线作业。本发明的焊线方法在进行焊线作业前先对悬空区域的焊线区进行空打,通过检测空打过程中的偏移量找出最优的作业参数,让焊线机以最优的作业参数进行焊线,降低悬臂产品的悬空区域的上下晃动的影响,进而提高焊线的稳定性,降低焊线线弧的脱落的概率。
技术研发人员:陈博源
受保护的技术使用者:青岛泰睿思微电子有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!