一种机器人控制线抗干扰接地线缆的制作方法
本发明涉及电缆电线,更具体的,涉及一种机器人控制线抗干扰接地线缆。
背景技术:
1、由于机器人常常在周围有强电磁场的环境中工作,如发电机、电动工具和电磁波发射器等,容易对线缆传输信号造成干扰,这些信号干扰可能会影响控制系统的正确性和效率,并且可能会导致系统故障。但目前现有的机器人控制线缆的抗干扰效果通常较差。
技术实现思路
1、本发明所要解决的技术问题在于现有的机器人控制线缆的抗干扰效果通常较差。为了克服现有技术的缺陷,本发明提出了一种机器人控制线抗干扰接地线缆,利用金属屏蔽壳与屏蔽层相互配合,能够使电缆本体与公头接头和母头接头形成闭环,进而减少外部磁场对接头处的干扰,保证信号传输质量和稳定性。
2、为达此目的,本发明采用以下技术方案:
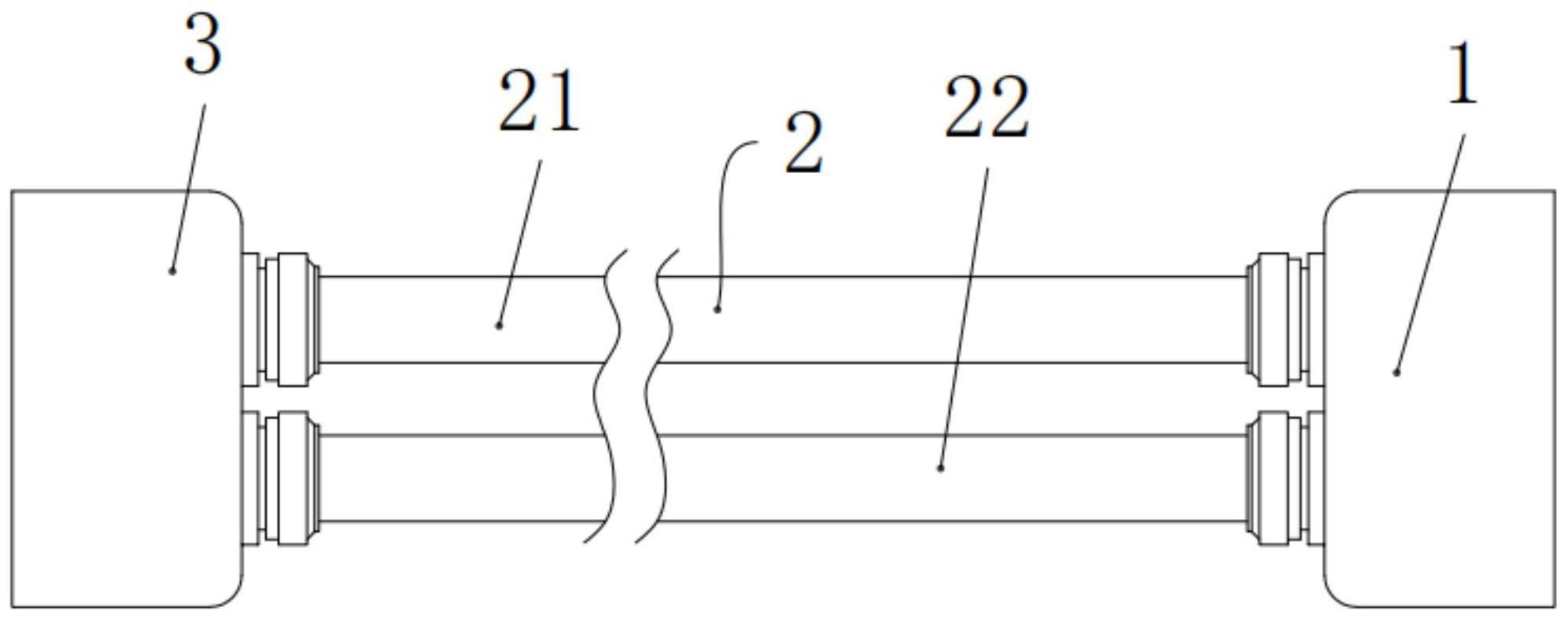
3、本发明提供了一种机器人控制线抗干扰接地线缆,包括公头接头、电缆本体、母头接头和金属屏蔽壳,公头接头和母头接头分别固设有电缆本体的两端,电缆本体包括动力线缆、信号线缆、套管和屏蔽层,动力线缆和信号线缆并列布置,且动力线缆和信号线缆上均绕包有屏蔽层,屏蔽层上绕包有套管,公头接头和母头接头外侧还固设有金属屏蔽壳。
4、在本发明较佳的技术方案中,所述屏蔽层为由铜丝编织而成的金属网。
5、在本发明较佳的技术方案中,所述屏蔽层的编织率不小于80%
6、在本发明较佳的技术方案中,所述公头接头包括壳体、球座和连接器,壳体一侧开设有两个球窝,球窝内滚动连接有球座,球座中心开设有通孔,所述动力线缆和所述信号线缆分别穿过其中一个通孔并与连接器固定连接,且连接器固设于壳体另一侧。
7、在本发明较佳的技术方案中,所述壳体内还开设有容纳腔,所述球窝与容纳腔连通,容纳腔设置有两个平行布置的转动环,容纳腔顶壁和底壁上对称设置有弧形槽,转动环转动连接于弧形槽内,转动环内侧设置有转轮,转轮通过连杆固设于转动环内侧壁上,转轮侧面还开设有凹槽,且所述动力线缆和所述信号线缆分别设置于其中一个凹槽内。
8、在本发明较佳的技术方案中,所述转轮包括十字块、第一弹簧、导向杆和弧形板,十字块固设于所述连杆上,十字块的四个端部均开设有插槽,导向杆一端插接于插槽内,且导向杆通过第一弹簧连接至插槽内侧壁上,导向杆另一端固设有弧形板,所述凹槽内设置于弧形板外侧壁上。
9、在本发明较佳的技术方案中,所述凹槽内壁上滚动连接有滚珠。
10、在本发明较佳的技术方案中,所述套管和所述屏蔽层之间还设置有阻燃层。
11、本发明的有益效果为:
12、本发明提出了一种机器人控制线抗干扰接地线缆,利用金属屏蔽壳与屏蔽层相互配合,能够使电缆本体与公头接头和母头接头形成闭环,进而减少外部磁场对接头处的干扰,保证信号传输质量和稳定性;设置的球座,使得在拉动电缆的时候能够带动球座同步转动,以减小弯折角度,防止线缆断裂。
技术特征:
1.一种机器人控制线抗干扰接地线缆,其特征在于:包括公头接头(1)、电缆本体(2)、母头接头(3)和金属屏蔽壳(4),公头接头(1)和母头接头(3)分别固设有电缆本体(2)的两端,电缆本体(2)包括动力线缆(21)、信号线缆(22)、套管(23)和屏蔽层(24),动力线缆(21)和信号线缆(22)并列布置,且动力线缆(21)和信号线缆(22)上均绕包有屏蔽层(23),屏蔽层(23)上绕包有套管(24),公头接头(1)和母头接头(3)外侧还固设有金属屏蔽壳(4)。
2.根据权利要求1所述的一种机器人控制线抗干扰接地线缆,其特征在于:所述屏蔽层(23)为由铜丝编织而成的金属网。
3.根据权利要求2所述的一种机器人控制线抗干扰接地线缆,其特征在于:所述屏蔽层(23)的编织率不小于80%。
4.根据权利要求1所述的一种机器人控制线抗干扰接地线缆,其特征在于:所述公头接头(1)包括壳体(11)、球座(12)和连接器(13),壳体(11)一侧开设有两个球窝(111),球窝(111)内滚动连接有球座(12),球座(12)中心开设有通孔(121),所述动力线缆(21)和所述信号线缆(22)分别穿过其中一个通孔(121)并与连接器(13)固定连接,且连接器(13)固设于壳体(11)另一侧。
5.根据权利要求4所述的一种机器人控制线抗干扰接地线缆,其特征在于:所述壳体(11)内还开设有容纳腔(112),所述球窝(111)与容纳腔(112)连通,容纳腔(112)设置有两个平行布置的转动环(14),容纳腔(112)顶壁和底壁上对称设置有弧形槽(113),转动环(14)转动连接于弧形槽(113)内,转动环(14)内侧设置有转轮(16),转轮(16)通过连杆(15)固设于转动环(14)内侧壁上,转轮(16)侧面还开设有凹槽(17),且所述动力线缆(21)和所述信号线缆(22)分别设置于其中一个凹槽(17)内。
6.根据权利要求5所述的一种机器人控制线抗干扰接地线缆,其特征在于:所述转轮(16)包括十字块(161)、第一弹簧(163)、导向杆(164)和弧形板(165),十字块(161)固设于所述连杆(15)上,十字块(161)的四个端部均开设有插槽(162),导向杆(164)一端插接于插槽(162)内,且导向杆(164)通过第一弹簧(163)连接至插槽(162)内侧壁上,导向杆(164)另一端固设有弧形板(165),所述凹槽(17)内设置于弧形板(165)外侧壁上。
7.根据权利要求5所述的一种机器人控制线抗干扰接地线缆,其特征在于:所述凹槽(17)内壁上滚动连接有滚珠(18)。
8.根据权利要求1所述的一种机器人控制线抗干扰接地线缆,其特征在于:所述套管(24)和所述屏蔽层(23)之间还设置有阻燃层(25)。
技术总结
本发明公开了一种机器人控制线抗干扰接地线缆,包括公头接头、电缆本体、母头接头和金属屏蔽壳,公头接头和母头接头分别固设有电缆本体的两端,电缆本体包括动力线缆、信号线缆、套管和屏蔽层,动力线缆和信号线缆并列布置,且动力线缆和信号线缆上均绕包有屏蔽层,屏蔽层上绕包有套管,公头接头和母头接头外侧还固设有金属屏蔽壳。本发明提出的一种机器人控制线抗干扰接地线缆,利用金属屏蔽壳与屏蔽层相互配合,能够使电缆本体与公头接头和母头接头形成闭环,进而减少外部磁场对接头处的干扰,保证信号传输质量和稳定性。
技术研发人员:廖宗良,王贵文
受保护的技术使用者:东莞宝特电业股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!