机器人充电桩的电极片结构、机器人充电桩及机器人设备的制作方法
本申请属于机器人,尤其涉及一种机器人充电桩的电极片结构、机器人充电桩及机器人设备。
背景技术:
1、目前,机器人充电桩的电极片和电源线的装配方式有两种方式。
2、第一种方式是:电源线的末端直接焊在电极片上。这种方式需要在装配过程中使用电洛铁对电极片与电源线的末端进行焊接,先把电极片固定在电极片支架上,然后焊接。由于电极片的焊接触脚设置在支架的凹槽里,焊接触脚延伸进一定深度,并且支架一般采用塑料材质制备成型,焊接过程不仅操作复杂、困难,而且容易把支架烫变形而导致整个结构报废。
3、第二种方式是:把电极片做成有一定厚度的板块状,然后在板块状的电极片上攻牙锁螺丝,采用螺钉来固定电源线末端。板块状的电极片可以采用cnc加工成型,但是采用cnc加工成型板块状电极片的零件成本过高。板块状的电极片也可以采用压铸工艺制备成型,这就需要针对所需的板块状的电极片进行开模具,导致零件成本过高。
4、可见,在现有技术的机器人充电桩的电极片和电源线之间的装配方式中,要么焊接困难且焊接容易导致支架变形;要么电极片的零件成本较高。
技术实现思路
1、本申请的目的在于提供一种机器人充电桩的电极片结构、机器人充电桩及机器人设备,旨在解决在现有技术的机器人充电桩的电极片和电源线之间的装配方式中,要么焊接困难且焊接容易导致支架变形,要么电极片的零件成本较高的问题。
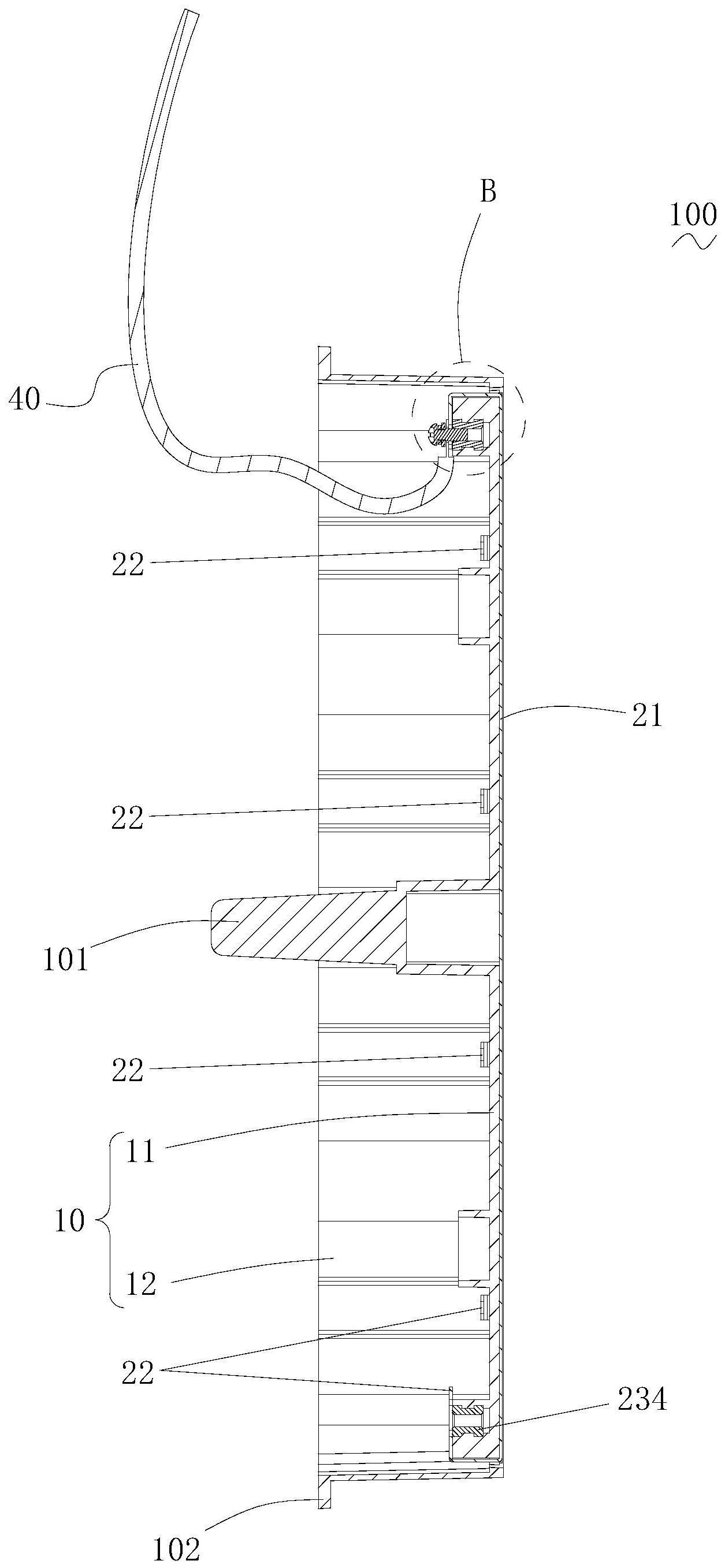
2、为实现上述目的,本申请采用的技术方案是:一种机器人充电桩的电极片结构,包括:
3、支架,包括顶壁和侧壁,侧壁围绕设置在顶壁的周向边缘区域以形成空腔,顶壁设有间隔的多个通孔;
4、电极片,包括主体部和多个安装触脚,多个安装触脚间隔布置于主体部的周向边缘,各个安装触脚一一对应地穿过通孔延伸进空腔,并且安装触脚弯折以夹持住顶壁,主体部贴设在顶壁背离空腔的表面上;
5、电源线,电源线的端部设有连接头,连接头与其中一个安装触脚搭接固定实现电连接。
6、应用本申请的机器人充电桩的电极片结构,电极片通过自身设置的安装触脚弯折夹持住支架的顶壁,使得电极片安装固定在支架上。并且,电源线的连接头是通过与位于空腔的其中一个安装触脚直接搭接固定而实现电连接的,装配过程简单、快捷,相对于现有技术而言,本申请实施例的电源线的连接头与相应的安装触脚之间无需进行焊接操作。由于采用了连接头与相应的安装触脚直接搭接固定的装配方式,因而电极片只需采用薄片板材来制备成型即可,薄片板材是容易裁剪成型或冲裁成型为所需形状的电极片的,从而大大降低了电极片的零件成本。
7、在一些实施例中,顶壁朝向空腔的一侧设有连接结构,连接结构对应其中一个安装触脚,连接头与其中一个安装触脚相互层叠后通过连接结构固定于顶壁。
8、在一些实施例中,连接结构包括设置于顶壁的连接座和螺钉,连接头设有第一穿孔,其中一个安装触脚设有第二穿孔,螺钉穿过第一穿孔与第二穿孔后螺接固定于连接座。
9、在一些实施例中,连接结构还包括弹力垫片,弹力垫片套在螺钉上,弹力垫片的一端抵接于连接头或其中一个安装触脚,弹力垫片的另一端抵接于螺钉的头部。
10、在一些实施例中,顶壁背离空腔的一侧设有容纳槽,主体部容纳于容纳槽内。
11、在一些实施例中,主体部背离顶壁的表面与容纳槽的槽壁顶部相平齐;或者,容纳槽的槽壁顶部高于主体部背离顶壁的表面。
12、在一些实施例中,主体部和多个安装触脚为一体成型构件。
13、在一些实施例中,电极片的厚度为0.3mm至1.0mm。
14、根据本申请的另一方面,提供了一种机器人充电桩。具体的,该机器人充电桩包括充电桩主体和充电枪,充电枪伸缩装配于充电桩主体,其中,充电枪设置有如前述的机器人充电桩的电极片结构。
15、根据本申请的又一方面,提供了一种机器人设备。具体的,该机器人设备包括机器人和如前述的机器人充电桩,在机器人执行自动回充操作时,机器人充电桩的充电枪伸出并插入机器人的回充插口,以使电极片结构的电极片与回充插口内的回充接头电连接。
技术特征:
1.一种机器人充电桩的电极片结构,其特征在于,包括:
2.根据权利要求1所述的机器人充电桩的电极片结构,其特征在于,
3.根据权利要求2所述的机器人充电桩的电极片结构,其特征在于,
4.根据权利要求3所述的机器人充电桩的电极片结构,其特征在于,
5.根据权利要求1-4任一项所述的机器人充电桩的电极片结构,其特征在于,
6.根据权利要求5所述的机器人充电桩的电极片结构,其特征在于,
7.根据权利要求1-4任一项所述的机器人充电桩的电极片结构,其特征在于,
8.根据权利要求7所述的机器人充电桩的电极片结构,其特征在于,
9.一种机器人充电桩,其特征在于,包括充电桩主体和充电枪,所述充电枪伸缩装配于所述充电桩主体,其中,所述充电枪设置有如权利要求1-8任一项所述的机器人充电桩的电极片结构。
10.一种机器人设备,其特征在于,包括机器人和如权利要求9所述的机器人充电桩,在所述机器人执行自动回充操作时,所述机器人充电桩的所述充电枪伸出并插入所述机器人的回充插口,以使电极片结构的电极片与所述回充插口内的回充接头电连接。
技术总结
本申请属于机器人技术领域,尤其涉及一种机器人充电桩的电极片结构、机器人充电桩及机器人设备。其中,电极片结构包括:支架,包括顶壁和侧壁,侧壁围绕设置在顶壁的周向边缘区域以形成空腔,顶壁设有间隔的多个通孔;电极片,包括主体部和多个安装触脚,多个安装触脚间隔布置于主体部的周向边缘,各个安装触脚一一对应地穿过通孔,安装触脚弯折以夹持住顶壁,主体部贴设在顶壁背离空腔的表面上;电源线,电源线的端部设有连接头,连接头与其中一个安装触脚搭接固定实现电连接。应用本申请的技术方案旨在解决在现有技术的机器人充电桩的电极片和电源线之间的装配方式中,要么焊接困难且焊接容易导致支架变形,要么电极片的零件成本较高的问题。
技术研发人员:文科,李义平
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!