一种多手指晶圆搬运机械手的制作方法
本发明涉及半导体制造设备,具体涉及一种多手指晶圆搬运机械手。
背景技术:
1、晶圆搬运机械手是一种在半导体制作工艺中,用于搬运晶圆的装置。 由于在半导体制作工艺中,需要将晶圆在各个工位之间进行传送,因此传送的过程中的传送精度以及单次传送数量都会对晶圆的产量造成影响。
2、现有技术中,已存在利用多个机械手的组合,同时结合机械手之间的无级变距,来达到提高晶圆的单次传送数量以及灵活使用的效果的技术方案,如现有专利cn110223948a中所述的一种半导体用机械手。
3、然而,对于上述现有技术方案,该方案虽然具备能够适应于半导体行业内不同晶圆片搬运的工艺需求的优点,但是由于机械手之间的间距是可变的,那么在对晶圆进行传送时,必须要预先将机械手之间的间距调整到与晶圆在工位上的间距所对应,精度要求极高,否则会在传送过程中对晶圆造成损伤;同时,由于机械手之间的间距是通过相关机械结构来调整的,那么在如此高精度的要求下,对于设备的维护要求也是极高的。
技术实现思路
1、本发明提供的一种多手指晶圆搬运机械手,能够在手指连接件上开设多个手指连接位,利用固定结构的多手指连接件,来避免在晶圆转运过程中需要对晶圆手指的间距进行调整的操作,从而能够解决上述现有技术中的技术问题。
2、本发明解决上述技术问题的技术方案如下:
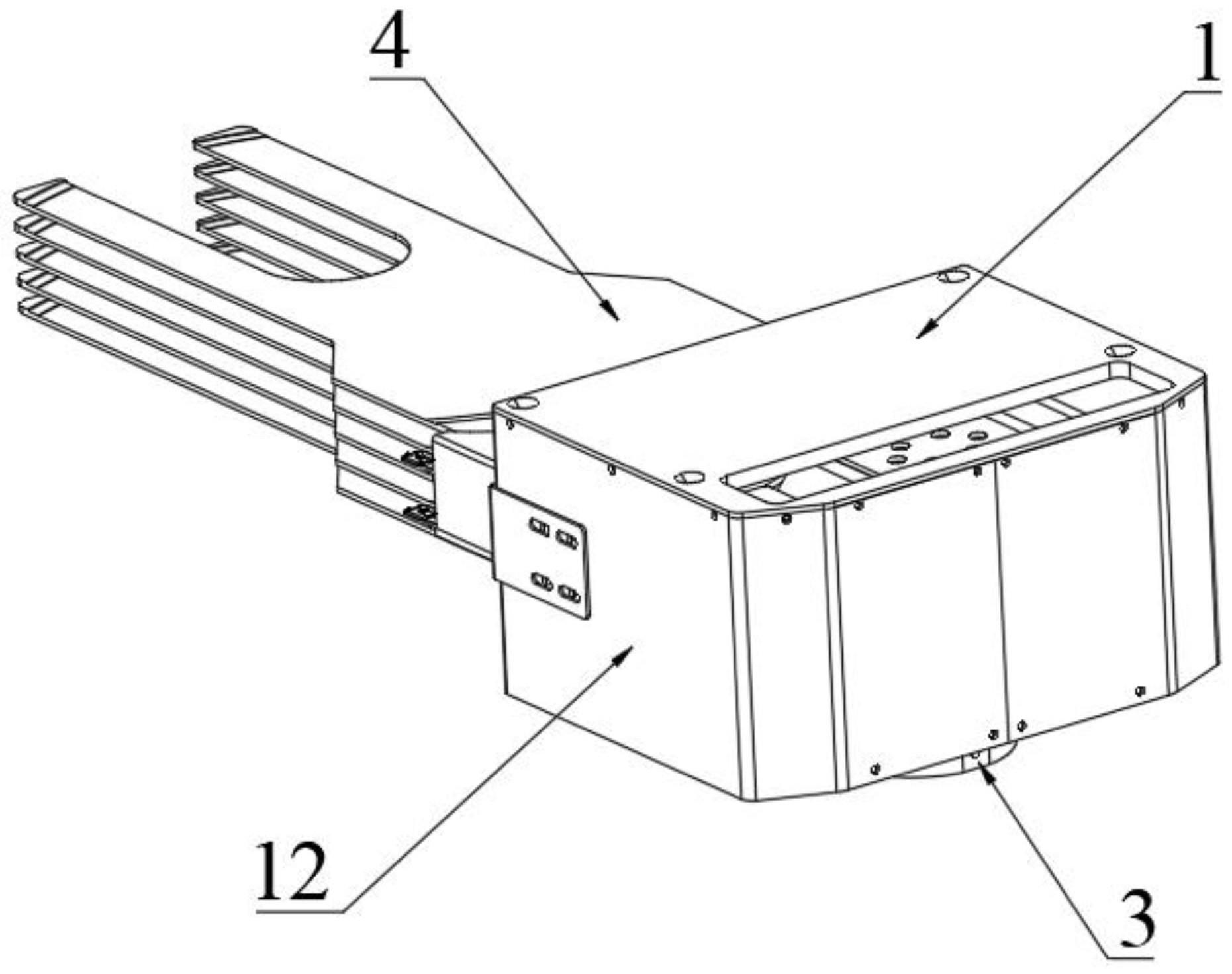
3、本发明提供了一种多手指晶圆搬运机械手,包括:安装架、手指连接件以及关节连接件;
4、所述安装架包括:底座以及侧板;所述底座与所述侧板围成一个箱型空间;
5、所述手指连接件安装在所述安装架中;所述手指连接件的一侧开设有若干手指连接位;所述手指连接位在竖直方向的间距为第一预设间距;
6、所述关节连接件安装于所述安装架的底部,用于连接所述安装架和机械臂。
7、在一些实施例中,所述底座包括:侧板定位槽;
8、所述侧板定位槽开设于所述底座的两侧;所述侧板能够沿着所述侧板定位槽与所述底座固定。
9、在一些实施例中,所述底座还包括:关节定位孔;所述关节定位孔设置于所述底座的底部,用于连接所述关节连接件。
10、在一些实施例中,所述手指连接件的两侧设有定位块,所述侧板的内壁设有手指连接件定位槽;所述手指连接件能够通过所述定位块以及所述手指连接件定位槽的配合固定在所述侧板的内壁。
11、在一些实施例中,所述手指连接位被开设于所述手指连接件上与所述侧板垂直的一侧。
12、在一些实施例中,所述手指连接位的两侧设有定位挡边,用于在安装晶圆手指时对晶圆手指的安装位置进行定位;所述定位挡边之间的间距为第二预设间距。
13、在一些实施例中,所述手指连接位的顶部设有手指定位孔,用于安装晶圆手指;所述手指定位孔的间距以及数量与所述晶圆手指安装部分上设有的安装孔对应。
14、在一些实施例中,所述第一预设间距等于晶圆在工位上的间距。
15、本申请的有益效果是:
16、本申请提供的一种多手指晶圆搬运机械手,1、能够连接多个晶圆手指,对晶圆进行夹取,从而提高工作效率;2、手指连接位是直接开设在手指连接件上的,从而使手指连接位之间的间距为固定,进而提高了对固定工位晶圆夹取的稳定性;3、手指连接位上设有定位挡边以及手指定位孔,从而提高晶圆手指安装时的精度。
技术特征:
1.一种多手指晶圆搬运机械手,其特征在于,包括:安装架、手指连接件以及关节连接件;
2.根据权利要求1所述的一种多手指晶圆搬运机械手,其特征在于,所述底座包括:侧板定位槽;
3.根据权利要求2所述的一种多手指晶圆搬运机械手,其特征在于,所述底座还包括:关节定位孔;所述关节定位孔设置于所述底座的底部,用于连接所述关节连接件。
4.根据权利要求3所述的一种多手指晶圆搬运机械手,其特征在于,所述手指连接件的两侧设有定位块,所述侧板的内壁设有手指连接件定位槽;所述手指连接件能够通过所述定位块以及所述手指连接件定位槽的配合固定在所述侧板的内壁。
5.根据权利要求4所述的一种多手指晶圆搬运机械手,其特征在于,所述手指连接位被开设于所述手指连接件上与所述侧板垂直的一侧。
6.根据权利要求5所述的一种多手指晶圆搬运机械手,其特征在于,所述手指连接位的两侧设有定位挡边,用于在安装晶圆手指时对晶圆手指的安装位置进行定位;所述定位挡边之间的间距为第二预设间距。
7.根据权利要求6所述的一种多手指晶圆搬运机械手,其特征在于,所述手指连接位的顶部设有手指定位孔,用于安装晶圆手指;所述手指定位孔的间距以及数量与所述晶圆手指安装部分上设有的安装孔对应。
8.根据权利要求7所述的一种多手指晶圆搬运机械手,其特征在于,所述第一预设间距等于晶圆在工位上的间距。
9.根据权利要求8所述的一种多手指晶圆搬运机械手,其特征在于,所述第二预设间距等于所述晶圆手指安装部分的宽度。
技术总结
本发明提供了一种多手指晶圆搬运机械手,包括:安装架、手指连接件以及关节连接件;所述安装架包括:底座以及侧板;所述底座与所述侧板围成一个箱型空间;所述手指连接件安装在所述安装架中;所述手指连接件的一侧开设有若干手指连接位;所述手指连接位在竖直方向的间距为第一预设间距;所述关节连接件安装于所述安装架的底部,用于连接所述安装架和机械臂。本申请提供的一种多手指晶圆搬运机械手,能够连接多个晶圆手指,对晶圆进行夹取,提高工作效率;手指连接位是直接开设在手指连接件上的,从而使手指连接位之间的间距为固定,进而提高了对固定工位晶圆夹取的稳定性;手指连接位上设有定位挡边以及手指定位孔,从而提高晶圆手指安装精度。
技术研发人员:周佳佳,刘冬梅,刘广齐,王强,王鑫
受保护的技术使用者:北京锐洁机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!