一种机械相控阵天线无零位开关设计系统及控制方法与流程
本发明涉及相控阵天线领域,尤其涉及一种机械相控阵天线无零位开关设计系统及控制方法。
背景技术:
1、victs天线是一种机械扫描式相控阵天线,通过在平板波导上连续开贯通的横向缝隙实现辐射的方法,具备通信容量大、成本低、机械稳定性好等特点,在军用领域和民用领域均有出色的实用价值。
2、其中,机械相控阵天线不需要附加额外的有源射频芯片便能实现波束二维扫描的功能,其结构上具有超低剖面、小巧轻便、隐蔽性强、灵活机动等特点,是高性能、高机动性、低剖面、低成本天线的代表,能满足车载、机载等平台的迫切需求。
3、这种天线具备4层超薄结构,在使用时通过调整各层之间的相位差,从而实现二维扫描功能;因此,在使用前需要先将各层调整至零位开关处,以使其相位初始化;现有针对各层的相位调整方案主要有直驱方案和传动方案,针对不同的调整方案其零位开关设计也不同,但均需要设置不同形式的零位开关,以实现各层的初始化复位。
4、但是,零位开关的设置会存在安装布局困难、可靠性差、存在寻零故障等问题;因此,有必要提供一种机械相控阵天线无零位开关设计系统及控制方法来解决上述技术问题。
技术实现思路
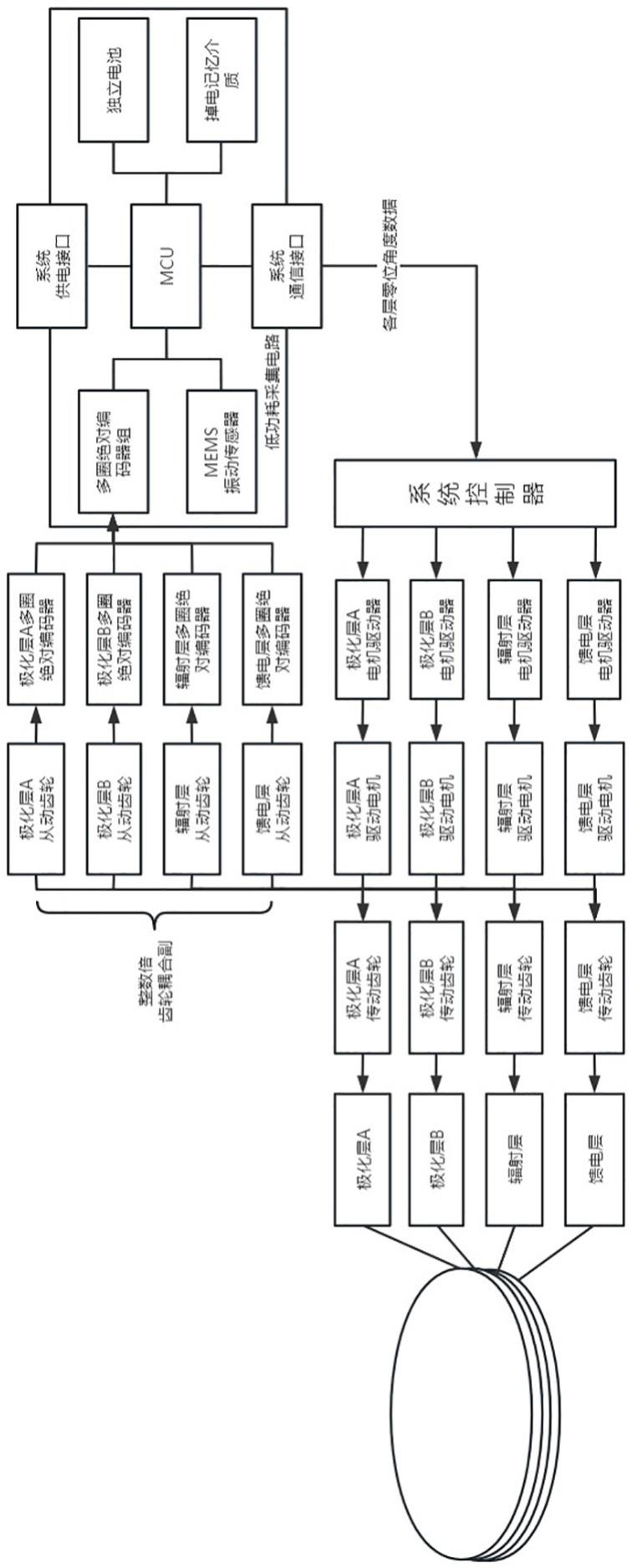
1、为解决上述技术问题,本发明提供的一种超低轮廓机械相控阵天线无零位开关设计系统,部署在超低轮廓机械相控阵天线中,包括极化层a、极化层b、辐射层、馈电层和系统控制器,在天线各层外环处对应设置极化层a传动齿轮、极化层b传动齿轮、辐射层传动齿轮和馈电层传动齿轮,通过极化层a驱动电机、极化层b驱动电机、辐射层驱动电机和馈电层驱动电机分别与各层的传动齿轮啮合,通过极化层a电机驱动器、极化层b电机驱动器、辐射层电机驱动器和馈电层电机驱动器对各驱动电机进行电信号控制,通过系统控制器对各电机驱动器进行驱动调节;
2、其中,还设置有极化层a从动齿轮、极化层b从动齿轮、辐射层从动齿轮和馈电层从动齿轮,并分别与各层的传动齿轮耦合且呈整数倍齿轮耦合副;通过极化层a多圈绝对编码器、极化层b多圈绝对编码器、辐射层多圈绝对编码器和馈电层多圈绝对编码器采集各层从动齿轮的有限圈数据和偏转角数据,并结合齿轮耦合副计算得到各层零位角度数据;
3、在进行初始化复位时,系统控制器各层零位角度数据对各层电机驱动器进行驱动调节,各层驱动电机执行对应电机驱动器电信号控制,调节各层传动齿轮将极化层a、极化层b、辐射层和馈电层调整至零位处。
4、作为更进一步的解决方案,还设置有低功耗采集电路,包括mcu、多圈绝对编码器接口组和系统通信接口;其中,所述mcu分别与多圈绝对编码器接口组和系统通信接口电性连接,所述多圈绝对编码器接口组用于获取各层从动齿轮的有限圈数据和偏转角数据,所述mcu用于各层零位角度数据的计算,所述系统通信接口与系统控制器电性连接,并持续提供各层零位角度数据。
5、作为更进一步的解决方案,所述低功耗采集电路还设置有mems振动传感器、系统供电接口、独立电池和掉电记忆介质,并分别与mcu电性连接;其中,mems振动传感器设置在超低轮廓机械相控阵天线上,所述系统供电接口用于获取系统工作供电,所述独立电池用于获取独立工作供电,所述掉电记忆介质用于进行数据存储和掉电保存。
6、一种超低轮廓机械相控阵天线无零位开关控制方法,运用于如上任一项所述的一种超低轮廓机械相控阵天线无零位开关设计系统中,通过如下步骤进行无零位开关控制复位:
7、步骤s1:获取系统供电接口信号;
8、若存在系统供电,则进入正常工作模式;若不存在系统供电,则进入低功耗工作模式;
9、正常工作模式执行步骤s2.1至步骤s2.4;
10、步骤s2.1:调用系统供电接口供电,并保持各层多圈绝对编码器工作供电;
11、步骤s2.2:以预设采样频率获取有限圈数据和偏转角数据;
12、步骤s2.3:以预设计算频率计算各层零位角度数据,并实时存储入掉电记忆介质中;
13、步骤s2.4:重复步骤s2.1至步骤s2.3,直至不存在系统供电;
14、低功耗工作模式执行步骤s3.1至步骤s3.5;
15、步骤s3.1:调用独立电池供电,关闭各层多圈绝对编码器工作供电;
16、步骤s3.2:启动mems振动传感器,实时获取天线振动数据;
17、步骤s3.3:当天线振动数据达到检测阈值时,启动各层多圈绝对编码器工作供电;
18、步骤s3.4:采集当前时刻有限圈数据和偏转角数据,启动并存储入掉电记忆介质中;
19、步骤s3.5:判断天线振动数据是否静息,若静息则重复步骤s2.1至步骤s2.4,直至存在系统供电,否则返回执行步骤s3.4;
20、步骤s4:当得到初始化复位命令,调取各层零位角度数据并输出至系统控制器;
21、步骤s5:调节各层传动齿轮将极化层a、极化层b、辐射层和馈电层调整至零位处。
22、作为更进一步的解决方案,各层零位角度数据通过如下公式计算:
23、;
24、其中,为各层对应编号,为层零位角度数据,为取余函数,为层的有限圈数据,为层的偏转角数据。
25、与相关技术相比较,本发明提供的一种机械相控阵天线无零位开关设计系统及控制方法具有如下有益效果:
26、本发明摒弃零位开关设计,通过使用齿轮传动方式并结合驱动电机、电机驱动器和系统控制器相互配合,实现相控阵天线各层的传动控制;并在传动齿轮处添加与之耦合的从动齿轮,且维持传动齿轮和从动齿轮的齿轮耦合副呈整数倍,以避免多圈旋转带来的误差叠加;本方案无须设置零位开关,从而避免传感器多、布线多,可靠性差等问题,在上电时也无需寻找电机绕组零位,直接通过零位角度数据便能实现精准复位;此外,还针对不同工作情况,选择不同的工作模式;存在系统供电时,则实时获取并存储各层零位角度数据以实现零位精确感知;不存在系统供电时,则通过低功耗的mems振动传感器,实时获取天线振动数据,并在天线振动数据达到检测阈值时,再启动各层多圈绝对编码器工作供电,从而实现低功耗超长待机。
技术特征:
1.一种超低轮廓机械相控阵天线无零位开关设计系统,部署在超低轮廓机械相控阵天线中,包括极化层a、极化层b、辐射层、馈电层和系统控制器,其特征在于,在天线各层外环处对应设置极化层a传动齿轮、极化层b传动齿轮、辐射层传动齿轮和馈电层传动齿轮,通过极化层a驱动电机、极化层b驱动电机、辐射层驱动电机和馈电层驱动电机分别与各层的传动齿轮啮合,通过极化层a电机驱动器、极化层b电机驱动器、辐射层电机驱动器和馈电层电机驱动器对各驱动电机进行电信号控制,通过系统控制器对各电机驱动器进行驱动调节;
2.根据权利要求1所述的一种超低轮廓机械相控阵天线无零位开关设计系统,其特征在于,还设置有低功耗采集电路,包括mcu、多圈绝对编码器接口组和系统通信接口;其中,所述mcu分别与多圈绝对编码器接口组和系统通信接口电性连接,所述多圈绝对编码器接口组用于获取各层从动齿轮的有限圈数据和偏转角数据,所述mcu用于各层零位角度数据的计算,所述系统通信接口与系统控制器电性连接,并持续提供各层零位角度数据。
3.根据权利要求2所述的一种超低轮廓机械相控阵天线无零位开关设计系统,其特征在于,所述低功耗采集电路还设置有mems振动传感器、系统供电接口、独立电池和掉电记忆介质,并分别与mcu电性连接;其中,mems振动传感器设置在超低轮廓机械相控阵天线上,所述系统供电接口用于获取系统工作供电,所述独立电池用于获取独立工作供电,所述掉电记忆介质用于进行数据存储和掉电保存。
4.一种超低轮廓机械相控阵天线无零位开关控制方法,运用于如权利要求1至权利要求3任一项所述的一种超低轮廓机械相控阵天线无零位开关设计系统中,其特征在于,通过如下步骤进行无零位开关控制复位:
5.根据权利要求4所述的一种超低轮廓机械相控阵天线无零位开关控制方法,其特征在于,各层零位角度数据通过如下公式计算:
技术总结
本发明提供了一种机械相控阵天线无零位开关设计系统及控制方法,涉及相控阵天线领域。本发明通过使用齿轮传动方式并结合驱动电机、电机驱动器和系统控制器相互配合,实现相控阵天线各层的传动控制;并在传动齿轮处添加与之耦合的从动齿轮,且维持传动齿轮和从动齿轮的齿轮耦合副呈整数倍,以避免多圈旋转带来的误差叠加,在上电时无需寻找电机绕组零位,直接通过零位角度数据便能实现精准复位,避免零位开关设计的诸多问题;此外,还针对不同工作情况,选择不同的工作模式;不存在系统供电时,则通过低功耗的MEMS振动传感器,实时获取天线振动数据,并在天线振动数据达到检测阈值时,再启动各层多圈绝对编码器工作供电,从而实现低功耗超长待机。
技术研发人员:毛晓江,安鑫,郭玉成
受保护的技术使用者:成都时代宇辰科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!