图像传感器、图像处理系统及其操作方法与流程
本公开的各种实施方式涉及数据半导体电路,以及更具体地,涉及图像传感器、图像处理系统和图像处理系统的操作方法。
背景技术:
1、近来,计算机环境范式已经转变为无处不在的计算系统,这使得计算机系统能够随时随地使用。因此,诸如移动电话、数码相机和笔记本电脑此类的便携式电子装置的使用已在迅速增加。
2、广泛用在电子装置中的图像感测装置是使用半导体对光起反应的性质来捕获图像的装置。图像感测装置可以大致分为电荷耦合器件(ccd)图像感测装置和互补金属氧化物半导体(cmos)图像感测装置。近来,cmos图像感测装置被广泛使用,因为cmos图像感测装置可以允许模拟控制电路和数字控制电路二者直接实现在单个集成电路(ic)上。
技术实现思路
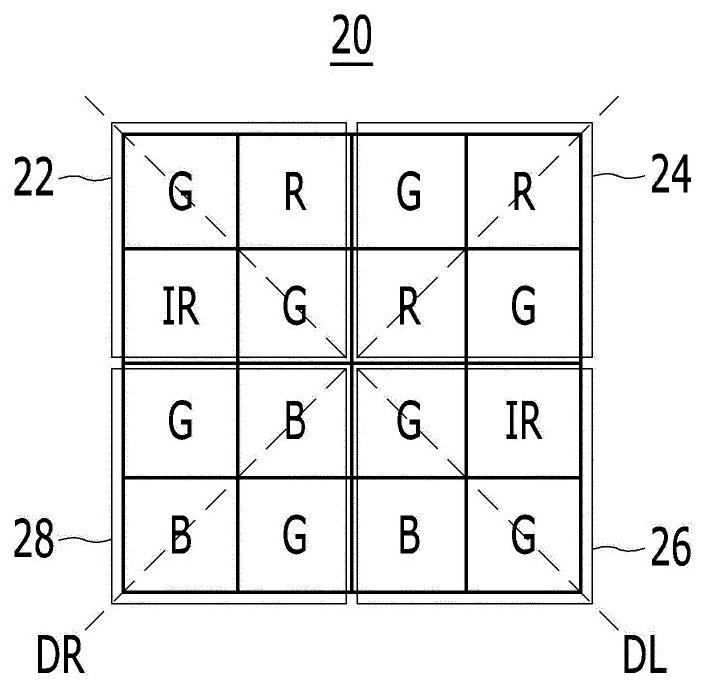
1、根据一实施方式,一种具有图像传感器的像素阵列可以包括:像素图案,其中在4×4单位像素组中,第一至第四2×2像素组在顺时针方向上布置,在彼此不相邻的两个2×2像素组中的每一个中布置一个红外像素,在第一对角线方向上布置相同的绿色像素,以及在与第一对角线方向交叉的第二对角线方向上对半布置红色像素和蓝色像素。
2、根据一实施方式,一种图像处理系统可以包括:图像传感器,适于感测对象的光学图像以及输出图像数据;图像处理装置,适于接收图像数据,根据模式操作来处理接收到的图像,以及提供输出图像;以及显示装置,适于显示输出图像,其中图像传感器可以包括像素阵列,像素阵列具有像素图案,其中在4×4单位像素组中,在第一至第四2×2像素组中的彼此不相邻的两个2×2像素组中的每一个中布置一个红外像素,在第一对角线方向上布置相同的绿色像素,以及在与第一对角线方向交叉的第二对角线方向上对半布置红色像素和蓝色像素。
3、根据一实施方式,一种包括图像传感器的图像处理系统的操作方法可以包括:确定图像处理系统是否处于深度模式;当图像处理系统处于深度模式时,对图像传感器中包括的像素阵列的像素图案中的红外像素进行采样并且基于采样的红外像素获得三维(3d)深度信息;当图像处理系统未处于深度模式时,确定图像处理系统处于高照度模式还是低照度模式;在高照度模式下执行马赛克重排模式并且将rgw-ir图案转换为bayer图案;以及在低照度模式下执行2-sum模式并且生成信噪比。
技术特征:
1.一种图像传感器,包括:
2.根据权利要求1所述的图像传感器,其中,在所述第一2×2像素组至第四2×2像素组中彼此不相邻的第一2×2像素组和第三2×2像素组中的每一个中布置一个红外像素,布置在所述第一对角线方向上而与红外像素相邻的绿色像素被包括在第一2×2像素组和第三2×2像素组中,以及对半布置在所述第二对角线方向上的红色像素和蓝色像素分别被包括在第二2×2像素组和第四2×2像素组中或者分别被包括在第四2×2像素组和第二2×2像素组中。
3.根据权利要求1所述的图像传感器,其中,在所述第一2×2像素组至第四2×2像素组中彼此不相邻的第二2×2像素组和第四2×2像素组中的每一个中布置一个红外像素,布置在所述第二对角线方向上而与红外像素相邻的绿色像素被包括在第二2×2像素组和第四2×2像素组中,以及对半布置在所述第一对角线方向上的红色像素和蓝色像素分别被包括在第一2×2像素组和第三2×2像素组中或者分别被包括在第三2×2像素组和第一2×2像素组中。
4.根据权利要求1所述的图像传感器,其中,在第一2×2像素组中,绿色像素布置在所述第一对角线方向上,以及红外像素和红色像素布置在所述第二对角线方向上,
5.根据权利要求1所述的图像传感器,其中,在第一2×2像素组中,蓝色像素布置在所述第一对角线方向上,以及绿色像素布置在所述第二对角线方向上,
6.根据权利要求1所述的图像传感器,其中,在第一2×2像素组中,红色像素布置在所述第一对角线方向上,以及绿色像素布置在所述第二对角线方向上,
7.根据权利要求1所述的图像传感器,其中,在第一2×2像素组中,绿色像素布置在所述第一对角线方向上,以及红外像素和蓝色像素布置在所述第二对角线方向上,
8.一种图像处理系统,包括:
9.根据权利要求8所述的图像处理系统,其中,在第一2×2像素组至第四2×2像素组中彼此不相邻的第一2×2像素组和第三2×2像素组中的每一个中布置一个红外像素,布置在所述第一对角线方向上而与红外像素相邻的绿色像素被包括在第一2×2像素组和第三2×2像素组中,以及对半布置在所述第二对角线方向上的红色像素和蓝色像素分别被包括在第二2×2像素组和第四2×2像素组中或者分别被包括在第四2×2像素组和第二2×2像素组中。
10.根据权利要求8所述的图像处理系统,其中,在第一2×2像素组至第四2×2像素组中彼此不相邻的第二2×2像素组和第四2×2像素组中的每一个中布置一个红外像素,布置在所述第二对角线方向上而与红外像素相邻的绿色像素被包括在第二2×2像素组和第四2×2像素组中,以及对半布置在所述第一对角线方向上的红色像素和蓝色像素分别被包括在第一2×2像素组和第三2×2像素组中或者分别被包括在第三2×2像素组和第一2×2像素组中。
11.根据权利要求8所述的图像处理系统,其中,所述图像处理装置包括模式操作电路,所述模式操作电路适于根据所述模式操作而在深度模式、马赛克重排模式和2-sum模式下生成图像数据。
12.根据权利要求11所述的图像处理系统,其中,所述模式操作电路确定所述图像处理系统是否处于所述深度模式,
13.根据权利要求12所述的图像处理系统,其特中,在所述马赛克重排模式下,第一红外像素被转换为蓝色像素,第二红外像素被转换为红色像素,位于所述第二对角线方向上的蓝色像素被转换为红色像素,以及位于所述第二对角线方向上的红色像素被转换为蓝色像素。
14.根据权利要求12所述的图像处理系统,其中,在所述2-sum模式下,第一2×2像素组至第四2×2像素组中的每一个中的相同颜色的像素被求和,并且实现放大。
15.根据权利要求12所述的图像处理系统,其中,在所述马赛克重排模式下,在包括所述4×4单位像素组的5×5输入像素组中,水平方向、竖直方向和对角线方向的梯度值和滤波值被生成,以及对应于所述梯度值的倒数的权重被分配给所述滤波值以将rgw-ir图案转换为bayer图案。
16.一种图像处理系统的操作方法,所述图像处理系统包括图像传感器,所述操作方法包括:
17.根据权利要求16所述的操作方法,其中,所述像素图案具有4×4单位像素组,在所述4×4单位像素组中,第一2×2像素组至第四2×2像素组在顺时针方向上布置,第一红外像素和第二红外像素分别布置在彼此不相邻的两个2×2像素组中,相同的绿色像素布置在第一对角线方向上,红色像素和蓝色像素对半布置在与所述第一对角线方向交叉的第二对角线方向上。
18.根据权利要求17所述的操作方法,其中,在所述马赛克重排模式下,所述第一红外像素被转换为蓝色像素,所述第二红外像素被转换为红色像素,位于所述第二对角线方向上的蓝色像素被转换为红色像素,以及位于所述第二对角线方向上的红色像素被转换为蓝色像素。
19.根据权利要求17所述的操作方法,其中,在所述2-sum模式下,第一2×2像素组至第四2×2像素组中的每一个中的相同颜色的像素被求和,并且实现放大。
20.根据权利要求17所述的操作方法,其中,在所述马赛克重排模式下,在包括所述4×4单位像素组的5×5输入像素组中,水平方向、竖直方向和对角线方向的梯度值和滤波值被生成,以及对应于所述梯度值的倒数的权重被分配给所述滤波值以将所述rgw-ir图案转换为所述bayer图案。
技术总结
本申请公开了图像传感器、图像处理系统及其操作方法。一种图像传感器,包括具有像素图案的像素阵列,其中在4×4单位像素组中,第一至第四2×2像素组在顺时针方向上布置,在彼此不相邻的两个2×2像素组中的每一个中布置一个红外像素,在第一对角线方向上布置相同的绿色像素,并且在与第一对角线方向交叉的第二对角线方向上对半布置红色像素和蓝色像素。
技术研发人员:车受蓝
受保护的技术使用者:爱思开海力士有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!