一种晶圆传送方法、装置以及系统与流程
本发明涉及晶圆加工设备,特别涉及一种晶圆传送方法、装置以及系统。
背景技术:
1、目前,在单片式晶圆传送领域,晶圆传送机构在晶圆取放的结构上大都是采用双夹持结构;其中一个夹持结构能够实现在晶圆交换位a取一片待加工晶圆,在晶圆加工位b放该片待加工晶圆的动作;另一个夹持结构能够实现在晶圆加工位b取一片已加工晶圆,在晶圆交换位a放该片已加工晶圆的动作;双夹持结构的晶圆传送机构在点对点的传送模式下,能够非常高效的实现晶圆传送需求。但是随着晶圆传送模式的快速发展,一点对多点、多点对多点的传送需求已经成为发展的主流,出现晶圆加工位bx、晶圆加工位by相近时间完成加工,同时等待晶圆传送机构进行晶圆取放的情况,由于传送效率不佳而影响加工效率的情况。所以目前的结构在传送效率上已经很难满足最新的传送模式的需求。急需开发新型的晶圆取放机构实现一点对多点、多点对多点的传送需求。
技术实现思路
1、本发明提出了一种晶圆传送方法、装置以及系统,以提高晶圆的传送效率。
2、为了实现上述目的,本发明提供如下技术方案:
3、第一方面,本发明提供了一种晶圆传送方法,包括以下步骤:
4、获取晶圆加工位b的晶圆取放需求;
5、执行晶圆加工位bx的晶圆取放需求,获取领先完成加工任务的两个晶圆加工位by、bz完成加工任务所需所需的时间为ty、tz,ty<tz;
6、判断时间ty、tz及晶圆传送时间是否满足预设条件;若满足预设条件则先去晶圆加工位by执行晶圆取放需求;否则,返回晶圆交换位a执行晶圆取放需求。
7、可选的,上述晶圆传送方法中,预设条件包括:ty≤t1,其中:
8、t1为晶圆传送装置在晶圆加工位b之间运动所需时间。
9、可选的,上述晶圆传送方法中,预设条件还包括:当ty>t1,且ty≥t+2t,其中:
10、t1为晶圆传送装置在晶圆加工位b之间运动所需时间;
11、t为晶圆传送装置从晶圆交换位a到所有晶圆加工位b位来回时间;
12、t为晶圆传送装置到位后执行一取一放晶圆所需时间。
13、可选的,上述晶圆传送方法中,预设条件还包括:当ty>t1,ty<t+2t,且tz≥ty+t+2t,其中:
14、t1为晶圆传送装置在晶圆加工位b之间运动所需时间;
15、t为晶圆传送装置从晶圆交换位a到所有晶圆加工位b位来回时间;
16、t为晶圆传送装置到位后执行一取一放晶圆所需时间。
17、可选的,上述晶圆传送方法中,预设条件还包括:当ty>t1,ty<t+2t,tz<ty+t+2t,且t不等≥t等,其中:
18、t1为晶圆传送装置在晶圆加工位b之间运动所需时间;
19、t为晶圆传送装置从晶圆交换位a到所有晶圆加工位b位来回时间;
20、t不等为不等晶圆加工位by的晶圆取放需求的加工制程等待时间,t不等=t+2t-ty;
21、t等为等待晶圆加工位by的晶圆取放需求的加工制程等待时间,=ty+2t+2t-tz;
22、t为晶圆传送装置到位后执行一取一放晶圆所需时间。
23、第二方面,本发明提供了一种晶圆传送装置,用于按照上述任一项的晶圆传送方法移动,晶圆传送装置包括晶圆传送机构、多轴机器人和晶圆取放机构,其中:
24、晶圆传送机构用于在晶圆交换位和多个晶圆加工位之间移动;
25、多轴机器人设置于晶圆传送机构上,以调整晶圆取放机构的取放角度;
26、晶圆取放机构设置于多轴机器人上以取放晶圆。
27、可选的,上述晶圆传送装置中,晶圆取放机构包括多个取放夹持结构,多个取放夹持结构由上往下布置。
28、可选的,上述晶圆传送装置中,晶圆取放机构包括四个取放夹持结构,分别为第一取放夹持结构、第二取放夹持结构、第三取放夹持结构和第四取放夹持结构,其中,第一取放夹持结构和第三取放夹持结构为一组,其中一个执行取晶圆动作,另一个执行放晶圆动作;第二取放夹持结构和第四取放夹持结构为一组,其中一个执行取晶圆动作,另一个执行放晶圆动作。
29、第三方面,本发明提供了一种晶圆传送系统,包括晶圆交换位、多个晶圆加工位、晶圆传送装置和控制器;
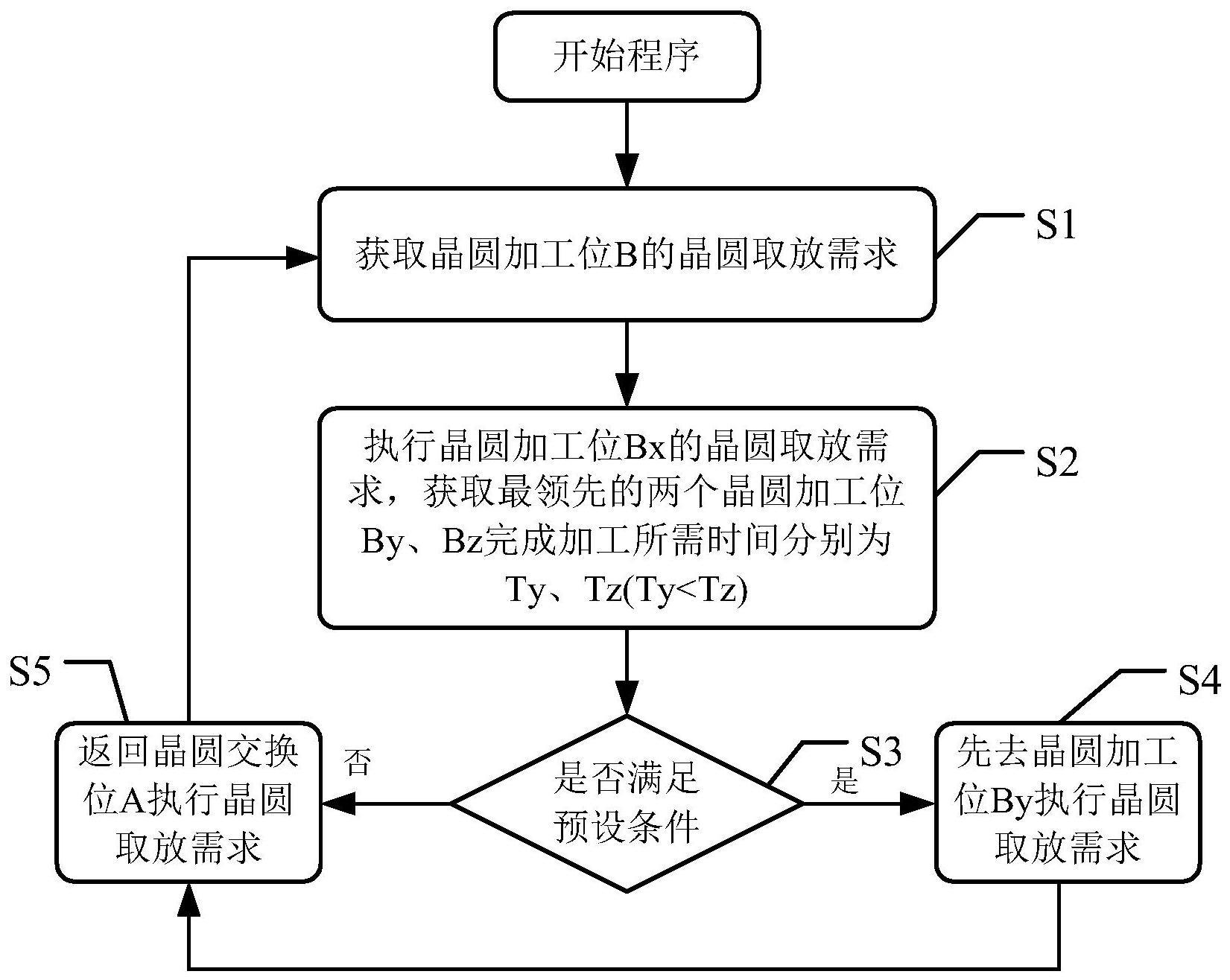
30、控制器执行以下步骤:
31、获取晶圆加工位b的晶圆取放需求;
32、执行晶圆加工位bx的晶圆取放需求,获取最领先的两个晶圆加工位by、bz完成加工所需时间分别为ty、tz,ty<tz;
33、判断时间ty和tz是否满足预设条件;若满足预设条件则先去晶圆加工位by执行晶圆取放需求;否则返回晶圆交换位a执行晶圆取放需求。
34、可选的,上述晶圆传送系统中,控制器集成于晶圆传送装置上。
35、由上述技术方案可以看出,本发明的晶圆传送方法通过计算晶圆加工位需求时间、晶圆传送机构来返等时间进行判断,执行后续晶圆取放动作,实现提前规划路径的功能。可以适用于一点对多点、多点对多点的晶圆传送模式,确保在单位时间能够处理更多的晶圆传送需求,提高晶圆的传送效率。
技术特征:
1.一种晶圆传送方法,其特征在于,包括以下步骤:
2.如权利要求1所述的晶圆传送方法,其特征在于,所述预设条件包括:ty≤t1,其中:
3.如权利要求1所述的晶圆传送方法,其特征在于,所述预设条件还包括:当ty>t1,且ty≥t+2t,其中:
4.如权利要求1所述的晶圆传送方法,其特征在于,所述预设条件还包括:当ty>t1,ty<t+2t,且tz≥ty+t+2t,其中:
5.如权利要求1所述的晶圆传送方法,其特征在于,所述预设条件还包括:当ty>t1,ty<t+2t,tz<ty+t+2t,且t不等≥t等,其中:
6.一种晶圆传送装置,其特征在于,用于按照权利要求1至5中任一项所述的晶圆传送方法移动,所述晶圆传送装置包括晶圆传送机构、多轴机器人和晶圆取放机构,其中:
7.如权利要求6所述的晶圆传送装置,其特征在于,所述晶圆取放机构包括多个取放夹持结构,多个取放夹持结构由上往下布置。
8.如权利要求7所述的晶圆传送装置,其特征在于,所述晶圆取放机构包括四个取放夹持结构,分别为第一取放夹持结构、第二取放夹持结构、第三取放夹持结构和第四取放夹持结构,其中,第一取放夹持结构和第三取放夹持结构为一组,其中一个执行取晶圆动作,另一个执行放晶圆动作;第二取放夹持结构和第四取放夹持结构为一组,其中一个执行取晶圆动作,另一个执行放晶圆动作。
9.一种晶圆传送系统,其特征在于,包括晶圆交换位、多个晶圆加工位、如权利要求6至8中任一项所述的晶圆传送装置和控制器;
10.如权利要求9所述的晶圆传送系统,其特征在于,所述控制器集成于所述晶圆传送装置上。
技术总结
本发明公开了一种晶圆传送方法、装置以及系统,包括获取晶圆加工位B的晶圆取放需求;执行晶圆加工位Bx的晶圆取放需求,获取最领先的两个晶圆加工位By、Bz完成加工所需时间分别为Ty、Tz,Ty<Tz;判断时间Ty和Tz是否满足预设条件;若满足预设条件则先去晶圆加工位By执行晶圆取放需求;否则返回晶圆交换位A执行晶圆取放需求。本发明的晶圆传送方法通过计算晶圆加工位需求时间、晶圆传送机构来返等时间进行判断,执行后续晶圆取放动作,实现提前规划路径的功能。可以适用于一点对多点、多点对多点的晶圆传送模式,确保在单位时间能能够处理更多的晶圆传送需求,提高晶圆的传送效率。
技术研发人员:陆赛浩,徐铭,陈丁堃
受保护的技术使用者:江苏启微半导体设备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!