一种晶圆定位抓取下料装置及方法与流程
本发明属于晶圆加工,具体涉及一种晶圆定位抓取下料装置及方法。
背景技术:
1、在晶圆加工工艺过程中,晶圆依次经过上料、打码、切割、裂片和下料工序,其中下料工序一般通过人工或机械手直接抓取下料。然而,经过激光打码后晶圆上形成有效区域,如不同形状结构的光栅图形,在下料抓取工序过程中,若抓取到晶圆上的有效区域部分,则可能会对晶圆上的有效区域造成损伤,从而影响产品质量。
技术实现思路
1、本发明的目的是提供一种晶圆定位抓取下料装置,至少可以解决现有技术中存在的部分缺陷。
2、为实现上述目的,本发明采用如下技术方案:
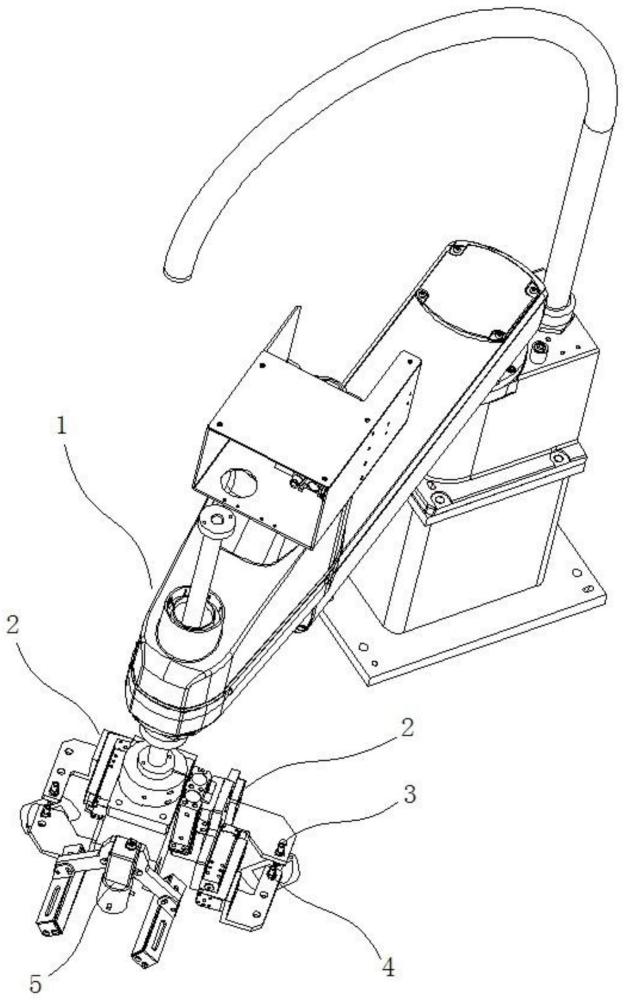
3、一种晶圆定位抓取下料装置,包括机器人组件,以及连接于机器人组件上的视觉检测组件和抓手;
4、所述视觉检测组件用于获取待下料晶圆上有效区域位置信息;
5、所述抓手用于抓取待下料晶圆,所述抓手包括固定吸盘和移动吸盘,且所述固定吸盘与移动吸盘之间间距可调;
6、所述机器人组件用于根据获取的待下料晶圆上有效区域位置信息,控制所述固定吸盘和移动吸盘吸附待下料晶圆的角度和位置,并将抓取的待下料晶圆移动至下料工位。
7、进一步的,所述抓手还包括滑台气缸和连接板,所述滑台气缸安装于所述机器人组件上,所述连接板安装于滑台气缸上,所述固定吸盘和移动吸盘连接于所述连接板上,通过滑台气缸带动固定吸盘和移动吸盘上下移动。
8、进一步的,所述固定吸盘通过固定吸盘安装板连接于所述连接板上,所述移动吸盘安装于移动吸盘安装板上,所述移动吸盘安装板通过电缸连接于所述连接板上。
9、进一步的,所述固定吸盘安装板和移动吸盘安装板上均设有若干安装孔。
10、进一步的,所述抓手设有两个,对称安装于所述机器人组件上。
11、进一步的,所述机器人组件包括安装座、水平多关节机器人和固定块,所述水平多关节机器人安装于所述安装座上,所述固定块连接于所述水平多关节机器人的活动端端部,所述抓手和视觉检测组件均连接于所述固定块上。
12、另外,本发明还提供了一种晶圆定位抓取下料方法,采用上述的晶圆定位抓取下料装置,包括如下步骤:
13、s1、利用机器人组件带动视觉检测组件移动至待下料晶圆上方,通过视觉检测组件获取待下料晶圆上有效区域位置信息;
14、s2、根据步骤s1获取的待下料晶圆上有效区域位置信息,确定抓手的固定吸盘和移动吸盘的吸附位置,使固定吸盘和移动吸盘的吸附点远离待下料晶圆上有效区域,并保证两个吸附点能稳定吸附住待下料晶圆;
15、s3、根据确定的固定吸盘和移动吸盘位置,通过机器人组件控制抓手的固定吸盘和移动吸盘对应待下料晶圆的相应位置,并吸附抓取移动至下料工位。
16、进一步的,所述步骤s2中各吸盘距离待下料晶圆边缘的距离大于吸盘半径+2mm,并且各吸盘距离待下料晶圆上有效区域轮廓边的距离大于吸盘半径+2mm。
17、进一步的,所述步骤s2中固定吸盘和移动吸盘吸附位置确定方法:固定吸盘和移动吸盘的吸附点均在待下料晶圆上有效区域之外,并且两个吸附点连线穿过或靠近待下料晶圆的重心,同时使两个吸附点之间距离最长。
18、进一步的,所述抓手设有两个,所述视觉检测组件检测两个待下料晶圆上有效区域位置信息,所述机器人组件先后控制两个抓手对应吸附抓取两个待下料晶圆,再同时将吸附抓取的两个待下料晶圆移动至下料工位下料。
19、与现有技术相比,本发明的有益效果:
20、本发明提供的这种晶圆定位抓取下料装置通过设置视觉检测组件检测晶圆上的有效区域位置信息,从而控制抓手的两个吸附点的吸附角度和位置,有效解决现有抓取晶圆上的有效区域部分而造成产品质量不合格的问题。
21、以下将结合附图对本发明做进一步详细说明。
技术特征:
1.一种晶圆定位抓取下料装置,其特征在于:包括机器人组件,以及连接于机器人组件上的视觉检测组件和抓手;
2.如权利要求1所述的晶圆定位抓取下料装置,其特征在于:所述抓手还包括滑台气缸和连接板,所述滑台气缸安装于所述机器人组件上,所述连接板安装于滑台气缸上,所述固定吸盘和移动吸盘连接于所述连接板上,通过滑台气缸带动固定吸盘和移动吸盘上下移动。
3.如权利要求2所述的晶圆定位抓取下料装置,其特征在于:所述固定吸盘通过固定吸盘安装板连接于所述连接板上,所述移动吸盘安装于移动吸盘安装板上,所述移动吸盘安装板通过电缸连接于所述连接板上。
4.如权利要求3所述的晶圆定位抓取下料装置,其特征在于:所述固定吸盘安装板和移动吸盘安装板上均设有若干安装孔。
5.如权利要求1~4任一项所述的晶圆定位抓取下料装置,其特征在于:所述抓手设有两个,对称安装于所述机器人组件上。
6.如权利要求1所述的晶圆定位抓取下料装置,其特征在于:所述机器人组件包括安装座、水平多关节机器人和固定块,所述水平多关节机器人安装于所述安装座上,所述固定块连接于所述水平多关节机器人的活动端端部,所述抓手和视觉检测组件均连接于所述固定块上。
7.一种晶圆定位抓取下料方法,其特征在于:采用权利要求1~6任一项所述的晶圆定位抓取下料装置,包括如下步骤:
8.如权利要求7所述的晶圆定位抓取下料方法,其特征在于:所述步骤s2中各吸盘距离待下料晶圆边缘的距离大于吸盘半径+2mm,并且各吸盘距离待下料晶圆上有效区域轮廓边的距离大于吸盘半径+2mm。
9.如权利要求7所述的晶圆定位抓取下料方法,其特征在于:所述步骤s2中固定吸盘和移动吸盘吸附位置确定方法:固定吸盘和移动吸盘的吸附点均在待下料晶圆上有效区域之外,并且两个吸附点连线穿过或靠近待下料晶圆的重心,同时使两个吸附点之间距离最长。
10.如权利要求7所述的晶圆定位抓取下料方法,其特征在于:所述抓手设有两个,所述视觉检测组件检测两个待下料晶圆上有效区域位置信息,所述机器人组件先后控制两个抓手对应吸附抓取两个待下料晶圆,再同时将吸附抓取的两个待下料晶圆移动至下料工位下料。
技术总结
本发明提供了一种晶圆定位抓取下料装置,包括机器人组件,以及连接于机器人组件上的视觉检测组件和抓手;所述视觉检测组件用于获取待下料晶圆上有效区域位置信息;所述抓手用于抓取待下料晶圆,所述抓手包括固定吸盘和移动吸盘,且所述固定吸盘与移动吸盘之间间距可调;所述机器人组件用于根据获取的待下料晶圆上有效区域位置信息,控制所述固定吸盘和移动吸盘吸附待下料晶圆的角度和位置,并将抓取的待下料晶圆移动至下料工位。该发明通过设置视觉检测组件检测晶圆上的有效区域位置信息,从而控制抓手的两个吸附点的吸附角度和位置,有效解决现有抓取晶圆上的有效区域部分而造成产品质量不合格的问题。
技术研发人员:库东峰,袁庆丰,曹思洋,程国彬
受保护的技术使用者:武汉华工激光工程有限责任公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!