一种涂胶显影设备及控制方法与流程
本发明涉及半导体制造领域,尤其涉及一种涂胶显影设备及控制方法。
背景技术:
1、现有半导体加工的光刻工艺中,涂胶设备、光刻设备和显影设备分别完成光刻胶涂布工艺流程、光刻工艺流程以及显影工艺流程。随着半导体加工工艺水平的提升,市场主流将涂胶显影工艺流程集成在同一设备上,同时需要涂胶显影设备的产能大于光刻设备的产能。
2、现有技术中,片盒模块和工艺模块之间还设有层间工艺模块,用于增粘工艺或是缺陷检测,鉴于层间工艺模块需要对晶圆进行工艺处理,因此晶圆从片盒中取出时便是单片传递,大大限制了片盒模块的晶圆传递效率,同时,层间工艺模块两侧的两个穿墙单元还占据了整体设备长度方向上的大量空间。
技术实现思路
1、本发明主要提供了一种涂胶显影设备及控制方法,用以解决上述背景技术中提出的层间工艺模块逐片传递晶圆限制了整体设备的产能等技术问题。
2、本发明解决上述技术问题采用的技术方案为:
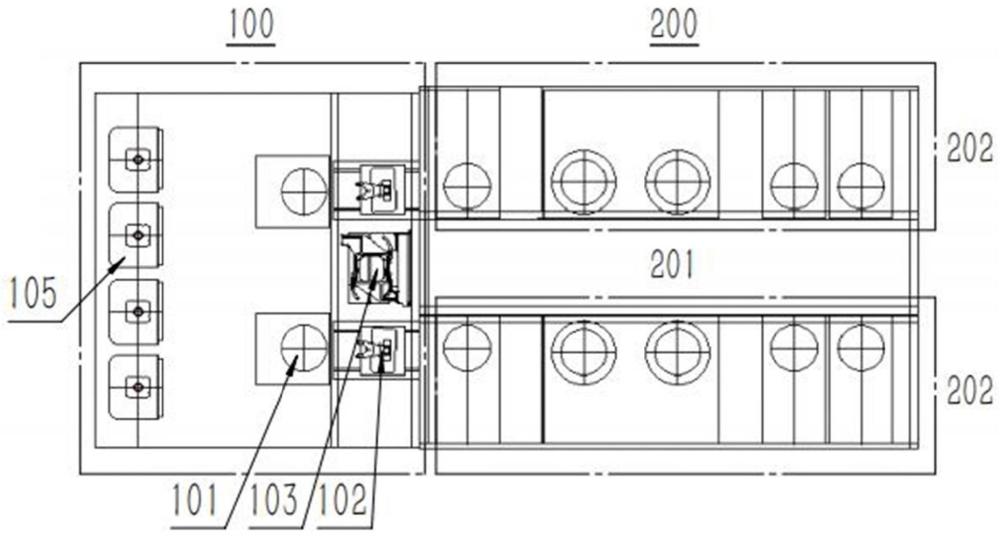
3、本发明第一方面提供了一种涂胶显影设备,所述涂胶显影设备包括:片盒模块,所述片盒模块用于储存放置有晶圆的片盒;以及工艺模块,所述工艺模块用于对所述晶圆做工艺处理:其中,所述片盒模块包括:片盒装载单元,所述片盒装载单元用于放置所述片盒;晶圆机械手,所述晶圆机械手用于一次性移动所述片盒中的n个所述晶圆,其中n为大于1的整数;层间机械手,所述层间机械手用于移动所述晶圆机械手上的所述晶圆;以及穿墙单元,所述穿墙单元用于在所述层间机械手和所述工艺模块之间移动所述晶圆。
4、优选的,所述晶圆机械手、所述层间机械手和所述穿墙单元沿所述涂胶显影设备的宽度方向设置。
5、优选的,所述片盒装载单元和所述晶圆机械手均设置有m个,其中m为不小于4的偶数,m个所述晶圆机械手成对设置于所述层间机械手的两侧,所述片盒装载单元和所述晶圆机械手一一对应。
6、优选的,所述片盒装载单元和所述晶圆机械手均设置有四个。
7、优选的,所述穿墙单元设置有至少六个,多个所述穿墙单元成对设置于所述层间机械手的两侧。
8、优选的,多个所述穿墙单元和所述晶圆机械手在竖直方向上间隔设置。
9、优选的,所述晶圆机械手设置有n个手指件,一个所述手指件用于放置一个所述晶圆。
10、优选的,所述工艺模块包括沿长度方向设置的层内机械手组以及设置在所述层内机械手组两侧的工艺单元,所述层内机械手组用于移动所述晶圆,所述工艺单元用于对所述晶圆进行工艺处理。
11、优选的,所述控制方法包括:s1:控制片盒机械手从片盒存放单元取出片盒后放到片盒装载单元;s2:控制进片用的晶圆机械手从所述片盒装载单元上的所述片盒中一次性取出n个所述晶圆送至层间机械手侧,其中n为大于1的整数;s3:控制所述层间机械手从进片用的所述晶圆机械手上取出所述晶圆送至穿墙单元;s4:控制所述穿墙单元将所述晶圆送至所述工艺模块;s5:对所述晶圆进行工艺处理;s6:控制所述穿墙单元将所述晶圆送回所述片盒模块;s7:控制所述层间机械手从所述穿墙单元处取出所述晶圆送至出片用的所述晶圆机械手;s8:控制出片用的所述晶圆机械手将晶圆送回至所述片盒装载单元上的所述片盒中;s9:控制片盒机械手从所述片盒装载单元取出所述片盒后送至所述片盒存放单元。
12、优选的,所述控制方法中的步骤s5包括单层工艺路线、多层串联工艺路线和多层并联工艺路线中的一个或多个:其中,所述单层工艺路线包括:s511:控制层内机械手从穿墙单元上取得所述晶圆后在该层内做工艺;以及s521:控制所述层内机械手带着所述晶圆做完工艺后再放回到所述穿墙单元;所述多层串联工艺路线包括:s512:控制所述层内机械手从所述穿墙单元上取得所述晶圆后在该层内做工艺;s522:控制所述层内机械手带着所述晶圆做完工艺后放回到所述穿墙单元;s532:控制所述穿墙单元将所述晶圆送至所述片盒模块;s542:控制所述层间机械手从该层的所述穿墙单元取得所述晶圆后放到其他层的所述穿墙单元;s552:控制所述穿墙单元将所述晶圆送至所述工艺模块;以及s562:控制其他层的所述层内机械手从该层的所述穿墙单元上取得所述晶圆后在该层内做工艺,做完工艺后再放回到所述穿墙单元;所述多层并联工艺路线包括:s513:控制多个所述层内机械手从所述穿墙单元上取得所述晶圆后分别在各自层内做工艺;s523:控制多个所述层内机械手带着所述晶圆做完工艺后放回到所述穿墙单元;s533:控制所述穿墙单元将所述晶圆送至所述片盒模块;s543:控制所述层间机械手从不同层的所述穿墙单元取得所述晶圆后放到另一层的所述穿墙单元;s553:控制所述穿墙单元将所述晶圆送至所述工艺模块;以及s563:控制另一层的所述层内机械手从该层的所述穿墙单元上取得所述晶圆后在该层内做工艺,做完工艺后再放回到所述穿墙单元;或者s514:控制所述层内机械手从所述穿墙单元上取得所述晶圆后在该层内做工艺;s524:控制所述层内机械手带着所述晶圆做完工艺后放回到所述穿墙单元;s534:控制所述穿墙单元将所述晶圆送至所述片盒模块;s544:控制所述层间机械手从所述穿墙单元取得所述晶圆后放到不同层的所述穿墙单元;s554:控制所述穿墙单元将所述晶圆送至所述工艺模块;以及s564:控制不用层的所述层内机械手从该层的所述穿墙单元上取得所述晶圆后在该层内做工艺,做完工艺后再放回到所述穿墙单元。
13、与现有技术相比,本发明的有益效果为:
14、本发明首先取消了层间工艺模块,将其整合进后续的工艺模块,从而无需从片盒中逐片取出晶圆,另外本发明通过晶圆机械手从片盒中一次性取出大量的晶圆,大大提高了晶圆传递效率,同时,本发明取消了和层间工艺模块配合的一个穿墙单元,保留另一个穿墙单元,配合层间机械手对晶圆进行移动,简化了晶圆提取流程,降低了整体设备的长度以及占地面积,使得整体设备精简并且传输效率更高,更稳定。
15、以下将结合附图与具体的实施例对本发明进行详细的解释说明。
技术特征:
1.一种涂胶显影设备,其特征在于,所述涂胶显影设备包括:
2.根据权利要求1所述的涂胶显影设备,其特征在于,所述晶圆机械手、所述层间机械手和所述穿墙单元沿所述涂胶显影设备的宽度方向设置。
3.根据权利要求2所述的涂胶显影设备,其特征在于,所述片盒装载单元和所述晶圆机械手均设置有m个,其中m为不小于4的偶数,m个所述晶圆机械手成对设置于所述层间机械手的两侧,所述片盒装载单元和所述晶圆机械手一一对应。
4.根据权利要求3所述的涂胶显影设备,其特征在于,所述片盒装载单元和所述晶圆机械手均设置有四个。
5.根据权利要求4所述的涂胶显影设备,其特征在于,所述穿墙单元设置有至少六个,多个所述穿墙单元成对设置于所述层间机械手的两侧。
6.根据权利要求5所述的涂胶显影设备,其特征在于,多个所述穿墙单元和所述晶圆机械手在竖直方向上间隔设置。
7.根据权利要求1所述的涂胶显影设备,其特征在于,所述晶圆机械手设置有n个手指件,一个所述手指件用于放置一个所述晶圆。
8.根据权利要求1至7中任一项所述的涂胶显影设备,其特征在于,所述工艺模块包括沿长度方向设置的层内机械手组以及设置在所述层内机械手组两侧的工艺单元,所述层内机械手组用于移动所述晶圆,所述工艺单元用于对所述晶圆进行工艺处理。
9.一种涂胶显影设备的控制方法,其特征在于,所述控制方法包括:
10.根据权利要求9所述的控制方法,其特征在于,所述控制方法中的步骤s5包括单层工艺路线、多层串联工艺路线和多层并联工艺路线中的一个或多个:
技术总结
本发明涉及半导体制造领域,提供了一种涂胶显影设备及控制方法,所述涂胶显影设备包括:片盒模块,所述片盒模块用于储存放置有晶圆的片盒;以及工艺模块,所述工艺模块用于对所述晶圆做工艺处理:其中,所述片盒模块包括:片盒装载单元,所述片盒装载单元用于放置所述片盒;晶圆机械手,所述晶圆机械手用于一次性移动所述片盒中的N个所述晶圆,其中N为大于1的整数;层间机械手,所述层间机械手用于移动所述晶圆机械手上的所述晶圆;以及穿墙单元,所述穿墙单元用于在所述层间机械手和所述工艺模块之间移动所述晶圆,本发明简化了晶圆提取流程,降低了整体设备的长度以及占地面积,使得整体设备精简并且传输效率更高,更稳定。
技术研发人员:姜天明,张建,陈兴隆
受保护的技术使用者:沈阳芯源微电子设备股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!