一种离散线束的插接装置的制作方法
本发明涉及线束装配的,具体涉及一种离散线束的插接装置。
背景技术:
1、在线束装配生产过程中,其中的关键工序即为将线束的端子插接在护套中。现有技术中通常在机械裁线并压接端子后,利用人工将压好端子的线束插接到护套上,但这种插接方式的人工成本高,且良品率参差不齐。另外,现有技术中也有依靠机械视觉微定位,最终自动插接到护套,但由于裁剪压端子环节很快,但是插接护套环节很慢,导致裁剪压端子环节效率很低,而且因为是一体化设备,所以灵活度不够。
2、综上,现需要设计一种离散线束的插接装置来解决现有技术中上述的问题。
技术实现思路
1、为解决上述现有技术中问题,本发明提供了一种离散线束的插接装置,解决了传统线束插接方法人工成本高或者灵活度不够的问题。
2、为达到上述目的,本发明采用如下技术方案:
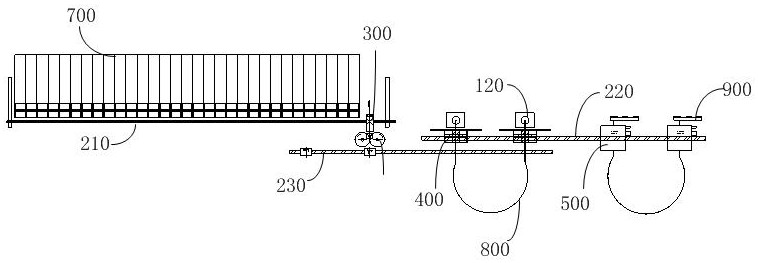
3、一种离散线束的插接装置,包括:
4、图像采集模块,其用于采集插接所需的图像信息;
5、控制模块,其用于根据所述图像信息生成线束运动路径;
6、机械手,其与所述控制模块通讯连接,用于执行所述线束运动路径以完成目标线束由离散线束区识别抓取到护套插接;
7、其中,所述图像信息包括:离散线束区图像、线束端面图像、线束侧面图像和护套孔图像;
8、所述控制模块用于根据所述线束端面图像和所述线束侧面图像生成线束的旋转指令。
9、在本发明的一些实施例中,所述控制模块还用于根据所述离散线束区图像获取目标线束的位置,所述机械手利用第一抓取单元夹取所述目标线束。
10、在本发明的一些实施例中,所述第一抓取单元包括吸气夹爪和电机,所述第一抓取单元可沿第一轨道滑动,其中,所述第一轨道邻近所述离散线束区设置。
11、在本发明的一些实施例中,所述插接装置还包括缓冲器和第二抓取单元,所述缓冲器和所述第二抓取单元均可沿第二轨道滑动,所述第二轨道邻近护套设置;
12、所述缓冲器用于与所述机械手配合执行所述线束的旋转指令,所述第二抓取单元用于与所述机械手配合将所述目标线束插接到所述护套孔中。
13、在本发明的一些实施例中,所述图像采集模块包括第一图像采集单元、第二图像采集单元和第三图像采集单元;所述第一图像采集单元与所述第一抓取单元固定连接用于获取所述离散线束区图像;所述第二图像采集单元固定于所述第二轨道的一侧用于获取所述线束端面图像和所述线束侧面图像;所述第三图像采集单元与所述第二抓取单元固定连接用于获取所述护套孔图像。
14、在本发明的一些实施例中,所述插接装置还包括理线器,所述理线器可沿第三轨道滑动,所述理线器与所述机械手配合用于整理所述目标线束。
15、在本发明的一些实施例中,所述缓冲器的数量为两个,两个所述缓冲器并排位于所述第二轨道上,分别用于固定同一目标线束的两端。
16、在本发明的一些实施例中,所述第二抓取单元的数量为两个,两个所述第二抓取单元并排位于所述第二轨道上,分别用于固定同一目标线束的两端。
17、在本发明的一些实施例中,所述插接装置的插接方法包括以下步骤:
18、s1、第一图像采集单元获取所述离散线束区图像并发送到所述控制模块,所述控制模块将目标线束的位置信息发送到机械手;所述机械手根据所述位置信息驱动第一抓取单元对目标线束进行抓取,并将其放置于缓冲器上;
19、s2、第二图像获取单元获取所述目标线束的所述线束端面图像和所述线束侧面图像并将其发送到所述控制模块;所述控制模块生成对应的旋转指令;所述机械手配合缓冲器执行所述旋转指令;
20、s3、所述机械手将所述目标线束放置到第二抓取单元后,第三图像采集单元获取护套孔图像并发送到控制模块,所述控制模块识别空闲状态的护套孔;所述机械手利用第二抓取单元将所述目标线束插接到护套孔中。
21、在本发明的一些实施例中,所述步骤s1还包括所述机械手驱动所述第一抓取单元对所述目标线束进行抓取后放置于理线器上;
22、所述理线器对所述目标线束进行整理后,所述理线器沿所述第三轨道滑动到所述缓冲器处;
23、所述机械手将所述目标线束的两端分别放置于所述缓冲器上。
24、本发明的技术方案相对现有技术具有如下技术效果:
25、本发明的插接装置所需的功耗小,且造价成本较低,能够快速将随机放置的线束进行准确插接到护套中,有效提高了线束插接的效率。
技术特征:
1.一种离散线束的插接装置,其特征在于,包括:
2.根据权利要求1所述的一种离散线束的插接装置,其特征在于,所述控制模块还用于根据所述离散线束区图像获取目标线束的位置,所述机械手利用第一抓取单元夹取所述目标线束。
3.根据权利要求2所述的一种离散线束的插接装置,其特征在于,所述第一抓取单元包括吸气夹爪和电机,所述第一抓取单元可沿第一轨道滑动,其中,所述第一轨道邻近所述离散线束区设置。
4.根据权利要求2所述的一种离散线束的插接装置,其特征在于,所述插接装置还包括缓冲器和第二抓取单元,所述缓冲器和所述第二抓取单元均可沿第二轨道滑动,所述第二轨道邻近护套设置;
5.根据权利要求4所述的一种离散线束的插接装置,其特征在于,所述图像采集模块包括第一图像采集单元、第二图像采集单元和第三图像采集单元;所述第一图像采集单元与所述第一抓取单元固定连接用于获取所述离散线束区图像;所述第二图像采集单元固定于所述第二轨道的一侧用于获取所述线束端面图像和所述线束侧面图像;所述第三图像采集单元与所述第二抓取单元固定连接用于获取所述护套孔图像。
6.根据权利要求1所述的一种离散线束的插接装置,其特征在于,所述插接装置还包括理线器,所述理线器可沿第三轨道滑动,所述理线器与所述机械手配合用于整理所述目标线束。
7.根据权利要求4所述的一种离散线束的插接装置,其特征在于,所述缓冲器的数量为两个,两个所述缓冲器并排位于所述第二轨道上,分别用于固定同一目标线束的两端。
8.根据权利要求4所述的一种离散线束的插接装置,其特征在于,所述第二抓取单元的数量为两个,两个所述第二抓取单元并排位于所述第二轨道上,分别用于固定同一目标线束的两端。
9.根据权利要求5所述的一种离散线束的插接装置,其特征在于,所述插接装置的插接方法包括以下步骤:
10.根据权利要求9所述的一种离散线束的插接装置,其特征在于,所述步骤s1还包括所述机械手驱动所述第一抓取单元对所述目标线束进行抓取后放置于理线器上;
技术总结
本发明公开了一种离散线束的插接装置,包括:图像采集模块,其用于采集插接所需的图像信息;控制模块,其用于根据所述图像信息生成线束运动路径;机械手,其与所述控制模块通讯连接,用于执行所述线束运动路径以完成目标线束由离散线束区识别抓取到护套插接;其中,所述图像信息包括:离散线束区图像、线束端面图像、线束侧面图像和护套孔图像;所述控制模块用于根据所述线束端面图像和所述线束侧面图像生成线束的旋转指令。本发明的插接装置所需的功耗小,且造价成本较低,能够快速将随机放置的线束进行准确插接到护套中,有效提高了线束插接的效率。
技术研发人员:杨涛,齐红涛,刘高强,张猛,朱崇乐
受保护的技术使用者:青岛海兴电子有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!