立式炉晶舟升降系统及闭环控制方法与流程
本发明属于半导体设备,具体而言,涉及一种立式炉晶舟升降系统及闭环控制方法。
背景技术:
1、立式炉热处理设备是半导体制造工艺制程中的重要的工艺处理设备。将晶圆叠放于晶舟6内,通过晶舟6升降装置将晶舟6提升至炉管7内,并通过炉门4密封炉管7,以实现镀膜工艺。由于工艺种类的多样性,炉管7内温度由400℃至1200℃不等。当工艺完成,晶舟升降组件驱动炉门4和晶舟6缓慢下降,从炉管7离开,进入晶圆传输区域。在晶圆传输区域完成晶圆交换。然后由晶舟升降组件驱动炉门4和晶舟6缓慢提升,晶舟6进入炉管7,炉门4密封炉管7,开始镀膜工艺。为保证镀膜工艺的进行,炉管7需要完全密封,因此炉管7与炉门4之间,需要密封圈5,通过挤压密封圈5,来实现密封。为保护密封圈5,压缩密封圈5的这段行程,需要相对较低的速度来完成。
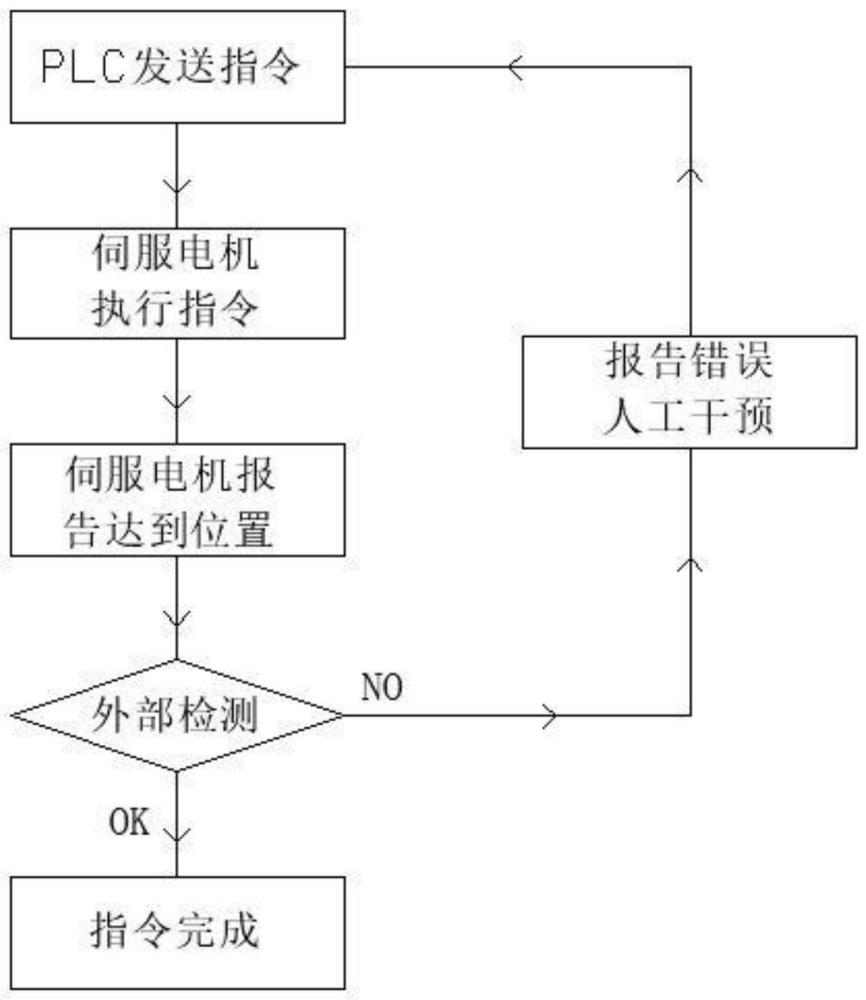
2、现有技术中,通过绝对值伺服电机1内部的伺服控制系统,来控制升降距离,以实现晶舟6的升降和炉门4的密封,存在以下缺点:1、无法形成闭环控制,伺服电机1显示到达某个位置时,没有外部检测来二次确认。一旦伺服电机1内部逻辑发生错误,或者传动组件如同步带、齿轮等发生跳齿现象,所有位置将发生错乱,造成严重后果。2、无法感知密封圈压缩过程,仅靠伺服控制系统的反馈,难以确保压缩过程的低速与稳定。因此,需要一种外部检测装置来确认晶舟升降位置,以形成闭环控制。
技术实现思路
1、本发明的目的在于提供一种立式炉晶舟升降系统及闭环控制方法,伺服控制系统确认运动过程,外部检测单元确认运动结果,形成闭环控制。为实现上述目的,采用的技术方案如下:
2、一种立式炉晶舟升降系统,包括:
3、晶舟升降单元,用于密封炉管7,其包括炉门4、晶舟6和晶舟升降组件;所述晶舟6至于炉门4的上表面,所述炉门4与晶舟升降组件的输出端连接;
4、外部检测单元,用于检测晶舟升降单元是否到达点位的真实位置,其包括:下部检测装置8和上部检测装置9;
5、所述下部检测装置8,用于检测零点位和下限位,其包括:
6、原点光电位传感器8a和下限位光电传感器8b,均固定于晶舟升降组件的晶舟升降底座10,由上到下分布,其均为凹槽型对射传感器;原点光电位传感器8a的发射端和接收端位于传感器感应片8c的两侧;下限位光电传感器8b的发射端和接收端位于传感器感应片8c的两侧;
7、所述传感器感应片8c,固定于炉门4;
8、所述上部检测装置9,用于检测关键点位,并实现区间段检测,其包括:
9、传感器支架9d,固定于晶舟升降底座10,用于安装转盘9b和光纤传感器9c;
10、转盘9b,转动安装于传感器支架9d,其上开设弧形孔,弧形孔沿转盘9b的厚度方向贯穿转盘9b;
11、光纤传感器9c,为对射传感器,包括发射传感器和接收传感器,两者均设置于转盘9b,沿转盘9b的厚度方向,两者位于转盘9b的不同侧。
12、优选地,上部检测装置9还包括机械式触点开关9a,用于检测上限位,当传感器感应片8c向上移动至抵压机械式触点开关9a时,机械式触点开关9a触发。
13、优选地,晶舟升降组件包括:
14、晶舟升降底座10;
15、伺服电机1、线轨3均安装于晶舟升降底座10;
16、滚珠丝杠副2转动安装于晶舟升降底座10;
17、伺服电机1的输出端与滚珠丝杠副2的丝杠连接,滚珠丝杠副2的螺母与炉门4连接;炉门4可沿着线轨3移动。
18、优选地,所述伺服电机1与控制器信号连接,控制器的输出端连接上位机控制系统的输入端。
19、优选地,所述弧形孔为腰孔。
20、一种立式炉晶舟升降的闭环控制方法,包括以下步骤:
21、步骤1、在伺服电机1的控制下,传感器感应片8c向上运动时,在此运动过程中,下限位传感器8b和原点位传感器8a均输出第一电平信号;
22、继续向上运动,在此运动过程中,机械式触点开关9a未触发,光纤传感器9c输出第二电平信号;
23、步骤2、当传感器感应片8c在伺服电机1的控制下,继续向上运动第三设定距离时,密封圈5开始接触炉管7;
24、此时,控制器认为晶舟升降单元已经达到减速位,将反馈信号至上位机控制系统;
25、在此状态下,传感器感应片8c撞击转盘9b,转盘9b旋转,弧形孔旋转至位置a,此时光纤传感器9c的发射传感器发出的脉冲信号透过弧形孔,接收传感器发出第一电平信号,确认晶舟升降单元已经实际到达减速位;
26、步骤3、晶舟升降单元在伺服电机1的控制下,继续向上运动第四设定距离;
27、此状态下,炉门4和炉管7持续压缩密封圈5;此时,控制器将反馈信号至上位机控制系统,认为晶舟升降单元已经达到关键点位;
28、在向上运动第四设定距离的过程中,传感器感应片8c推动转盘9b,转盘9b旋转,弧形孔由位置a继续旋转,光纤传感器9c将透过弧形孔,持续发出第一电平信号,确认晶舟升降单元上升,确认到达了关键点位的实际位置。
29、优选地,步骤3之后还包括以下步骤:
30、当光纤传感器9再次发出第二电平信号时,如果晶舟升降单元到关键点位仍然没有停止,即晶舟升降单元在伺服电机1的控制下,继续向上运动第五设定距离时,控制器认为晶舟升降单元已经达到上限位,将反馈信号至上位机控制系统;
31、同时机械式触点开关9a被传感器感应片8c触发,同时光纤传感器9c持续发出第二电平信号,确认上限位已经实际达到。
32、与现有技术相比,本发明的优点为:
33、1、伺服控制系统确认运动过程,外部检测单元确认运动结果,形成闭环控制。
34、2、能确认运动点位位置和区间段位置。具体的:
35、包含下限位检测,当伺服电机1驱动晶舟升降单元到达下限位时,可以确认位置是否真实达到。
36、包含上限位检测,当伺服电机1驱动晶舟升降单元到达上限位时,可以确认位置是否真实达到。
37、包含原点位检测,每当伺服电机1驱动晶舟升降单元经过原点位时,可以确认实际偏差值,并确认是否需要位置补偿。
38、包含区间段检测,当炉门通过压缩密封圈,密封炉管的时候,整个运动区间段都有检测信号。
技术特征:
1.一种立式炉晶舟升降系统,其特征在于,包括:
2.根据权利要求1所述的立式炉晶舟升降系统,其特征在于,上部检测装置(9)还包括机械式触点开关(9a),用于检测上限位,当传感器感应片(8c)向上移动至抵压机械式触点开关(9a)时,机械式触点开关(9a)触发。
3.根据权利要求1所述的立式炉晶舟升降系统,其特征在于,晶舟升降组件包括:
4.根据权利要求1所述的立式炉晶舟升降系统,其特征在于,所述伺服电机(1)与控制器信号连接,控制器的输出端连接上位机控制系统的输入端。
5.根据权利要求1所述的立式炉晶舟升降系统,其特征在于,所述弧形孔为腰孔。
6.一种立式炉晶舟升降的闭环控制方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的立式炉晶舟升降的闭环控制方法,其特征在于,步骤3之后还包括以下步骤:
技术总结
本发明提出了一种立式炉晶舟升降系统及闭环控制方法,该系统包括:晶舟升降单元,用于密封炉管,其包括炉门、晶舟和晶舟升降组件;晶舟至于炉门的上表面,炉门与晶舟升降组件的输出端连接;外部检测单元,用于检测晶舟升降单元是否到达点位的真实位置,其包括:下部检测装置和上部检测装置;下部检测装置,用于检测零点位和下限位;上部检测装置,用于检测关键点位,并实现区间段检测。本发明中,伺服控制系统确认运动过程,外部检测装置确认运动结果,形成闭环控制。
技术研发人员:刘强,杨平
受保护的技术使用者:上海稷以科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!