晶圆的检测夹持设备的制作方法
本发明属于机器人,具体涉及一种晶圆的检测夹持设备。
背景技术:
1、晶圆是指硅半导体集成电路制作所用的硅晶片,由于其形状为圆形,故称为晶圆。晶圆的加工要求较高,加工后的每片晶圆都要进行逐一检测,以保证晶圆的质量。
2、晶圆的检测夹持设备上通常设有多个工作臂,通过多个工作臂的运动实现晶圆的夹持或是松开。现有技术中,多个工作臂一般通过多个气缸进行运动控制,以此实现晶圆的夹持或是松开。工作臂的上述驱动结构存在生产制造成本高、运动控制复杂等缺陷。因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本发明所要解决的技术问题是提供一种有利于降低生产成本的晶圆的检测夹持设备。
2、为解决上述技术问题,本发明提供一种晶圆的检测夹持设备,包括:承载基台,其上转动设有旋转主体,所述旋转主体呈圆环状;齿环,设于所述旋转主体上,且位于所述旋转主体的外周,所述齿环能够相对所述旋转主体转动;多个工作臂,设于所述旋转主体的顶部,多个所述工作臂在所述旋转主体的周向上间隔分布,且能够在所述旋转主体的径向上滑动;所述工作臂具有夹持晶圆时的夹持状态和脱离晶圆时松开状态;多个中间单元,设于所述齿环上,且与多个所述工作臂一一对应设置,所述中间单元包括与所述工作臂联动的摆臂,所述齿环通过所述摆臂与所述工作臂联动;推压单元,设于所述承载基台上,且位于所述旋转主体的外周,所述推压单元包括能够在所述旋转主体的径向上做直线往复运动的推压块,所述推压块具有工作位置,当所述推压块位于工作位置且所述工作臂转动至所述推压单元时,所述推压块能够作用于所述摆臂以使所述摆臂带动所述工作臂朝向所述推压块运动;其中,所述齿环具有使得多个所述工作臂处于夹持状态的第二转动位置,在所述齿环处于第二转动位置时,所述推压块响应于外部操作而运动至所述工作位置,以使转动至所述推压单元处的所述工作臂处于松开状态。
3、优选地,所述齿环还具有使得多个所述工作臂处于松开状态的第一转动位置;所述晶圆的检测夹持设备还包括:机械限位结构,所述机械限位结构被配置为限定所述第一转动位置和所述第二转动位置。
4、优选地,所述机械限位结构包括固设于所述旋转主体上的限位板、转动设于所述齿环上的旋转臂、转动设于所述旋转臂上的限位滚轮、作用于所述旋转臂以使所述限位滚轮与所述限位板抵接的第二偏压件;
5、所述限位板设有与所述限位滚轮配合的限位面,所述限位面包括第一弧形面、第二弧形面、连接所述第一弧形面和所述第二弧形面的过渡面,所述第一弧形面被配置为使得所述齿环保持于第一转动位置,所述第二弧形面被配置为使得所述齿环保持于第二转动位置;其中,当所述限位滚轮位于所述第一弧形面时,所述工作臂处于松开状态;当所述限位滚轮位于所述第二弧形面时,所述工作臂处于夹持状态。
6、优选地,所述旋转主体上设有若干导向轮,若干所述导向轮在所述旋转主体的周向间隔分布,所述导向轮的旋转轴线沿所述旋转主体的轴向延伸,所述齿环通过若干所述导向轮设于所述旋转主体上;
7、其中,若干所述导向轮包括多个第一导向轮和多个第二导向轮,所述第一导向轮与所述第二导向轮相间分布,且位于同一圆周上,所述第一导向轮被配置为从上方对所述齿环进行限位,所述第二导向轮被配置为从下方对所述齿环进行限位。
8、优选地,所述中间单元包括转动设于所述齿环上的摆臂、固设于所述齿环用于所述摆臂限位的限位柱、作用于所述摆臂以使所述摆臂与所述限位柱相抵靠的第一偏压件,所述摆臂的旋转轴线沿所述旋转主体的轴向延伸,所述摆臂设有滑槽,所述工作臂设有与所述滑槽配合的滑动件;
9、所述滑动件响应于所述齿环由所述第一转动位置向第二转动位置的改变而从所述滑槽的第一滑动位置移动至第二滑动位置,以带动所述工作臂朝向所述旋转主体的中心运动,从而使得所述工作臂由松开状态切换为夹持状态。
10、优选地,所述第一偏压件的外周套设有套体,其中,所述套体在所述第一偏压件弹性力方向上的长度小于所述第一偏压件的长度。
11、优选地,所述推压块与所述摆臂配合的工作面为朝向所述旋转主体弯曲的第三弧形面,所述摆臂上转动设有与所述工作面配合的滚动体,所述滚动体的旋转轴线与所述旋转主体的轴向平行;其中,所述第三弧形面与所述旋转主体同轴分布,所述第三弧形面的圆心角小于相邻所述工作臂之间的夹角。
12、优选地,所述的晶圆的检测夹持设备还包括:电限位结构,包括第一感应片、第二感应片、多个光电传感器,多个所述光电传感器与所述第一感应片、所述第二感应片配合;所述第一感应片固设于所述旋转主体上,所述第二感应片与所述齿环固定连接,所述多个光电传感器固设于所述承载基台上;所述第二感应片和所述第一感应片呈圆环状,且在上下方向上相邻分布,所述第一感应片设有多个沿所述旋转主体的周向等间隔分布的第一感应槽,所述第二感应片上设有多个沿所述旋转主体的周向等间隔分布的第二感应槽。
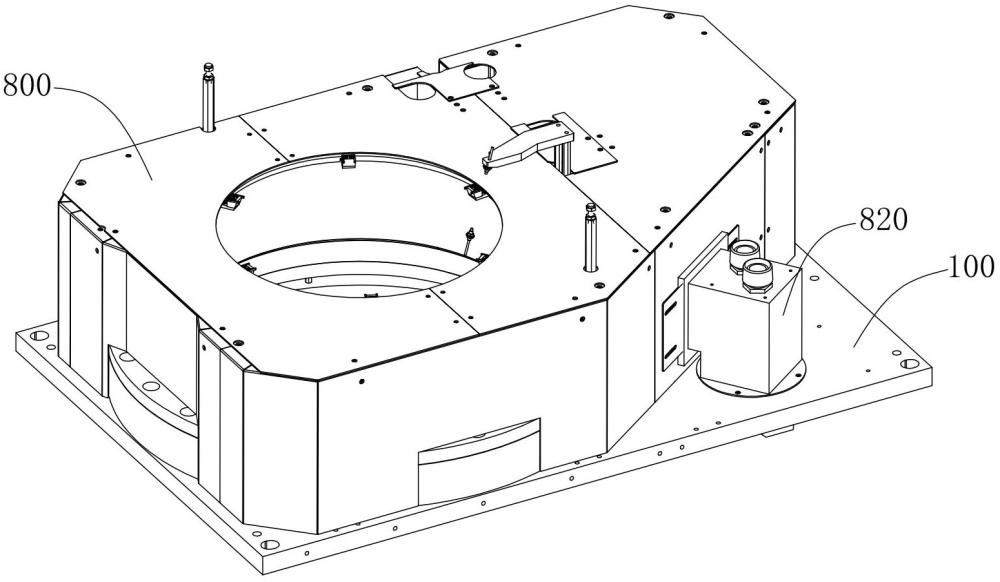
13、优选地,所述承载基台上还设有罩壳,所述罩壳罩设于所述旋转主体、所述齿环、所述推压单元的外周,其中,所述罩壳设有与所述旋转主体的内圈大小一致的避让孔,所述承载基台上设有与所述罩壳连通的外接箱壳,所述外接箱壳与外部抽吸设备连接,所述外接箱壳与所述罩壳之间设有过滤件。
14、优选地,所述承载基台上还设有用于驱使所述旋转主体旋转的主体驱动单元,所述主体驱动单元包括主体电机、主动带轮、钢带和从动带轮,所述从动带轮设于所述旋转主体上,所述主动带轮与所述主体电机传动连接,所述钢带张紧于所述主动带轮与所述从动带轮之间;其中,所述从动带轮与所述钢带配合的轮面为光面,所述主动带轮与所述钢带配合的轮面也为光面。
15、本发明提供的技术方案,具有以下优点:
16、在本实施例中,通过转动齿环能够实现多个工作臂的同步夹持或是同步松开,有效改善了工作臂夹持晶圆的效果,还能够减少电驱动元器件的使用量,大大降低了生产成本;
17、在本实施例中,当多个工作臂处于夹持状态时,晶圆的边沿收容于工作臂的卡位槽内,晶圆的部分边沿被工作臂遮挡,相机在工作时,推压块在第二气缸的作用下运动至工作位置,当某一工作臂转动至推压块时,相应的摆臂在推压块的作用下,被迫转动一定角度,此时,工作臂在摆臂的带动下而处于松开状态,由此,相机可拍摄到晶圆之前被遮挡的部分边沿区域,具有检测方便的优点。
技术特征:
1.一种晶圆的检测夹持设备,其特征在于,包括:
2.如权利要求1所述的晶圆的检测夹持设备,其特征在于,
3.如权利要求2所述的晶圆的检测夹持设备,其特征在于,
4.如权利要求1所述的晶圆的检测夹持设备,其特征在于,
5.如权利要求2所述的晶圆的检测夹持设备,其特征在于,
6.如权利要求5所述的晶圆的检测夹持设备,其特征在于,
7.如权利要求1所述的晶圆的检测夹持设备,其特征在于,
8.如权利要求1所述的晶圆的检测夹持设备,其特征在于,还包括:
9.如权利要求1所述的晶圆的检测夹持设备,其特征在于,
10.如权利要求1所述的晶圆的检测夹持设备,其特征在于,
技术总结
本发明公开了一种晶圆的检测夹持设备,包括:承载基台,其上转动设有旋转主体;齿环,设于旋转主体上,齿环能够相对旋转主体转动;多个工作臂,设于旋转主体的顶部,多个工作臂在旋转主体的周向上间隔分布,且能够在旋转主体的径向上滑动;工作臂具有夹持晶圆时的夹持状态和脱离晶圆时松开状态;多个中间单元,设于齿环上,中间单元包括与工作臂联动的摆臂,齿环通过摆臂与工作臂联动;推压单元,设于承载基台上,且位于旋转主体的外周,推压单元包括能够在旋转主体的径向上做直线往复运动的推压块,推压块具有工作位置,当推压块位于工作位置且工作臂转动至推压单元时,推压块能够作用于摆臂以使摆臂带动工作臂朝向推压块运动。
技术研发人员:孙丰,田斌
受保护的技术使用者:苏州赛腾精密电子股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!