一种晶圆摆臂机构的制作方法
本申请涉及晶圆搬运设备的领域,尤其是涉及一种晶圆摆臂机构。
背景技术:
1、晶圆通常是指制作硅半导体电路所用的硅晶片,硅晶片在生产过程中通常需要经过硅晶棒研磨、抛光以及切片等步骤,晶圆是半导体期间的基础中间产物,对于半导体器件的发展起到重要作用。
2、目前,在半导体元件成型的过程中,通常要将晶圆搬运至不同的工序中,以实现流水线加工,提高生产效率。然而因硅晶片的结构较为脆弱,在搬运过程中,相关技术通过采用机械夹持的方式,进而导致晶圆容易破碎以及刮花,晶圆在搬运过程中的安全性得不到保障。
技术实现思路
1、为了提升晶圆搬运过程中的安全性,本申请提供一种晶圆摆臂机构。
2、本申请提供的一种晶圆摆臂机构采用如下的技术方案:
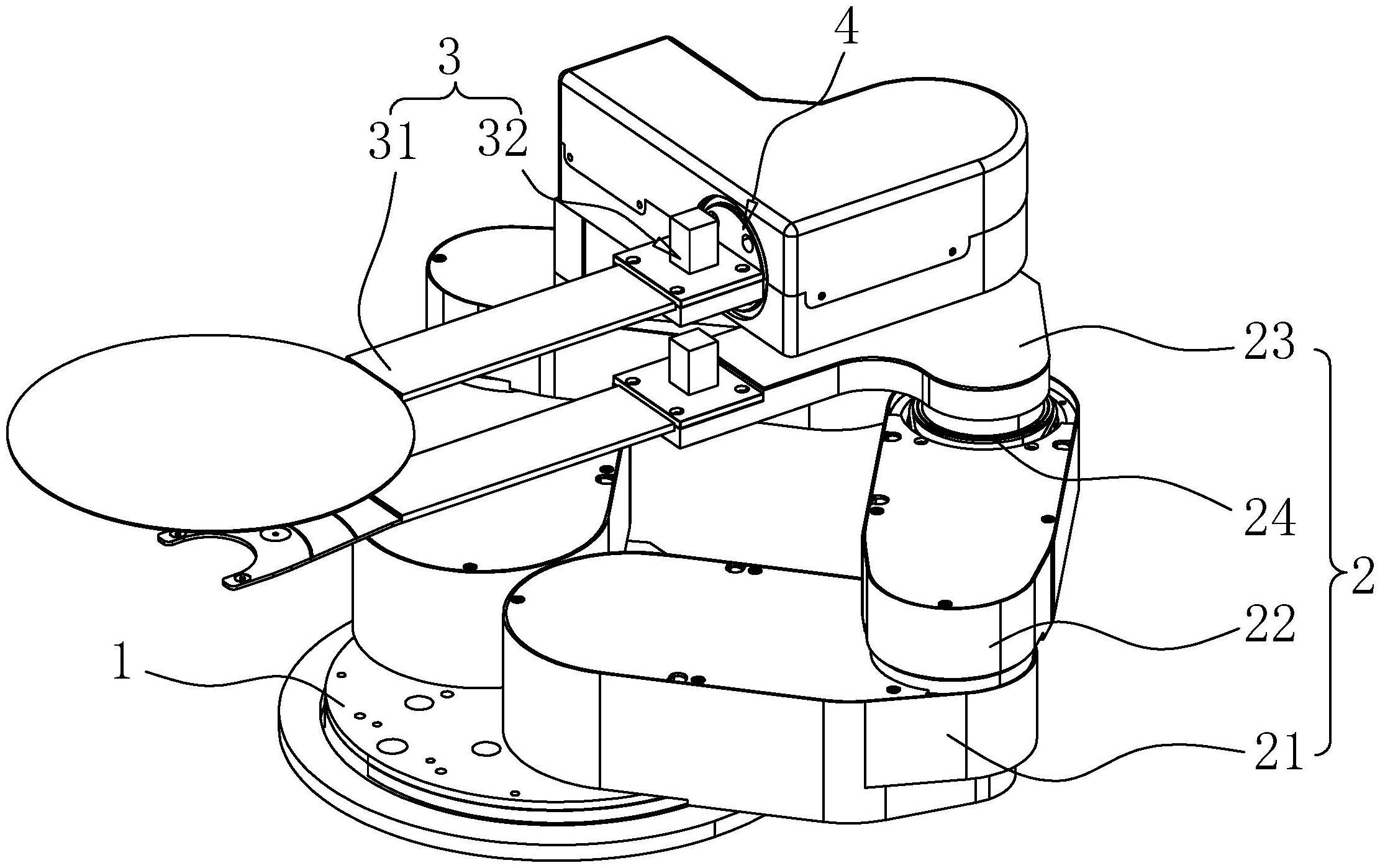
3、一种晶圆摆臂机构,包括基座,还包括摆臂组件,设于基座;以及真空抓取组件,设于所述摆臂组件,所述摆臂组件用于驱使所述真空抓取组件移动,所述真空抓取组件用于真空吸取晶圆片。
4、通过采用上述技术方案,摆臂组件可驱使真空抓取组件实现位移,此时真空抓取组件可通过真空吸附的方式将晶圆抓取,相较于机械性的抓取方式,真空抓取的方式减少硬质物体与晶圆之间的接触力,进而减少晶圆破损以及刮花的可能性,晶圆转移过程中的安全性得到提升。
5、优选的,所述真空抓取组件包括抓臂,设置于所述摆臂组件,所述抓臂上具有气道以及抓合孔,所述抓合孔与所述气道相连通;以及真空部件,与所述抓臂相连,用于抽取气道内的气体以使抓合孔产生抓取晶圆的吸力。
6、通过采用上述技术方案,抓臂起到承载晶圆的作用,真空部件可将晶圆吸附在抓臂处,吸合动作稳固,并且抓取动作快捷且高效,晶圆搬运过程中的稳定性得到提升。
7、优选的,所述抓合孔为多个,多个所述抓合孔均匀排布于所述抓臂上。
8、通过采用上述技术方案,多个均匀排布的抓合孔可对晶圆提供多点吸合,使抓合效果得到提升,抓取时晶圆的稳定性得到提升。
9、优选的,所述气道包括相互连通的主干段以及支干段,所述主干段与所述真空部件连通,所述支干段分别与多个所述抓合孔连通。
10、通过采用上述技术方案,主干段以及支干段可供真空部件同步控制多个抓合孔处的气流,进而使多个抓合孔处同步产生吸力,吸取动作更加规范及可靠。
11、优选的,还包括翻转组件,所述真空抓取组件通过所述翻转组件设于所述摆臂组件,所述翻转组件用于驱使所述真空抓取组件翻转。
12、通过采用上述技术方案,翻转组件可驱使真空抓取组件带动晶圆实现翻转,以便于摆臂机构可从更多的角度实现对晶圆进行取放,适配多种复杂的放置角度。
13、优选的,所述摆臂组件包括第一摆臂,转动设于基座;第二摆臂,转动设于所述第一摆臂的末端;第三摆臂,转动设于所述第二摆臂的末端,所述真空抓取组件设于所述第三摆臂;以及摆动驱动源,分别设于第一摆臂与基座的连接处、第一摆臂与第二摆臂的连接处以及第二摆臂与第三摆臂的连接处,所述摆动驱动源用于驱使第一摆臂、第二摆臂以及第三摆臂摆动。
14、通过采用上述技术方案,摆动驱动源起到输出动力的作用,可摆动的第一摆臂、第二摆臂以及第三摆臂三者通过延伸以及折叠的方式可驱使真空抓取组件往复直线移动,动作快捷灵敏。
15、优选的,所述摆动驱动源包括伺服电机、皮带轮组以及谐波减速器,所述皮带轮组分别与所述伺服电机以及所述谐波减速器相连。
16、通过采用上述技术方案,伺服电机可输出扭矩,皮带轮组可将扭矩传递至谐波减速器,谐波减速器在接收扭矩后,使传输更加平稳,使第一摆臂、第二摆臂以及第三摆臂摆动时的位置更稳定以及精确。
17、优选的,所述摆动驱动源为旋转气缸。
18、通过采用上述技术方案,旋转气缸可输出扭矩,以实现第一摆臂、第二摆臂以及第三摆臂等摆臂结构的摆动,结构简单实用,制作成本低。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1、摆臂组件可驱使真空抓取组件实现位移,此时真空抓取组件可通过真空吸附的方式将晶圆抓取,相较于机械性的抓取方式,真空抓取的方式减少硬质物体与晶圆之间的接触力,进而减少晶圆破损以及刮花的可能性,晶圆转移过程中的安全性得到提升;
21、2、多个均匀排布的抓合孔可对晶圆提供多点吸合,使抓合效果得到提升,抓取时晶圆的稳定性得到提升;
22、3、主干段以及支干段可供真空部件同步控制多个抓合孔处的气流,进而使多个抓合孔处同步产生吸力,吸取动作更加规范及可靠。
技术特征:
1.一种晶圆摆臂机构,包括基座(1),其特征在于:还包括
2.根据权利要求1所述的一种晶圆摆臂机构,其特征在于:所述真空抓取组件(3)包括
3.根据权利要求2所述的一种晶圆摆臂机构,其特征在于:所述抓合孔(314)为多个,多个所述抓合孔(314)均匀排布于所述抓臂(31)上。
4.根据权利要求3所述的一种晶圆摆臂机构,其特征在于:所述气道(313)包括相互连通的主干段(3131)以及支干段(3132),所述主干段(3131)与所述真空部件(32)连通,所述支干段(3132)分别与多个所述抓合孔(314)连通。
5.根据权利要求1所述的一种晶圆摆臂机构,其特征在于:还包括翻转组件(4),所述真空抓取组件(3)通过所述翻转组件(4)设于所述摆臂组件(2),所述翻转组件(4)用于驱使所述真空抓取组件(3)翻转。
6.根据权利要求1所述的一种晶圆摆臂机构,其特征在于:所述摆臂组件(2)包括
7.根据权利要求6所述的一种晶圆摆臂机构,其特征在于:所述摆动驱动源(24)包括伺服电机(241)、皮带轮组(242)以及谐波减速器(243),所述皮带轮组(242)分别与所述伺服电机(241)以及所述谐波减速器(243)相连。
8.根据权利要求6所述的一种晶圆摆臂机构,其特征在于:所述摆动驱动源(24)为旋转气缸。
技术总结
本申请涉及晶圆搬运设备的领域,尤其是涉及一种晶圆摆臂机构。其技术方案的要点是:包括基座,还包括摆臂组件,设于基座;以及真空抓取组件,设于所述摆臂组件,所述摆臂组件用于驱使所述真空抓取组件移动,所述真空抓取组件用于真空吸取晶圆片,本申请具有提升晶圆搬运安全性的作用。
技术研发人员:袁炜彬,梁伟东,余磊,李亚洲
受保护的技术使用者:东莞市智赢智能装备有限公司
技术研发日:20230227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!