一种负压吸附式机械手的制作方法
本技术涉及晶圆搬运,特别是涉及一种负压吸附式机械手。
背景技术:
1、晶圆是指制作硅半导体电路所用的硅晶片,其原始材料是硅。高纯度的多晶硅溶解后掺入硅晶体晶种,然后慢慢拉出,形成圆柱形的单晶硅。硅晶棒在经过研磨,抛光,切片后,形成硅晶圆片,也就是晶圆。国内晶圆生产线以8英寸和12英寸为主。晶圆加工时需要使用吸附式机械手将其搬运到加工位置。
2、专利号(cn212947867u)公开了晶圆片吸盘机构及晶圆片吸附机械手,该晶圆片吸盘机构及晶圆片吸附机械手采用特殊设计的吸盘,在进行下压吸附晶圆片时,不会造成晶圆片损坏,从而保证了晶圆片的质量,同时能够保证晶圆片与吸盘处于同一圆心,从而保证后续腐蚀精度。
3、晶圆在加工时可能会出现翘曲的情况,上述机械手难以对翘曲的晶圆进行有效吸附,从而导致晶圆在搬运过程中很容易脱落,需要加以改进。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种负压吸附式机械手。
2、本实用新型通过以下技术方案来实现上述目的:
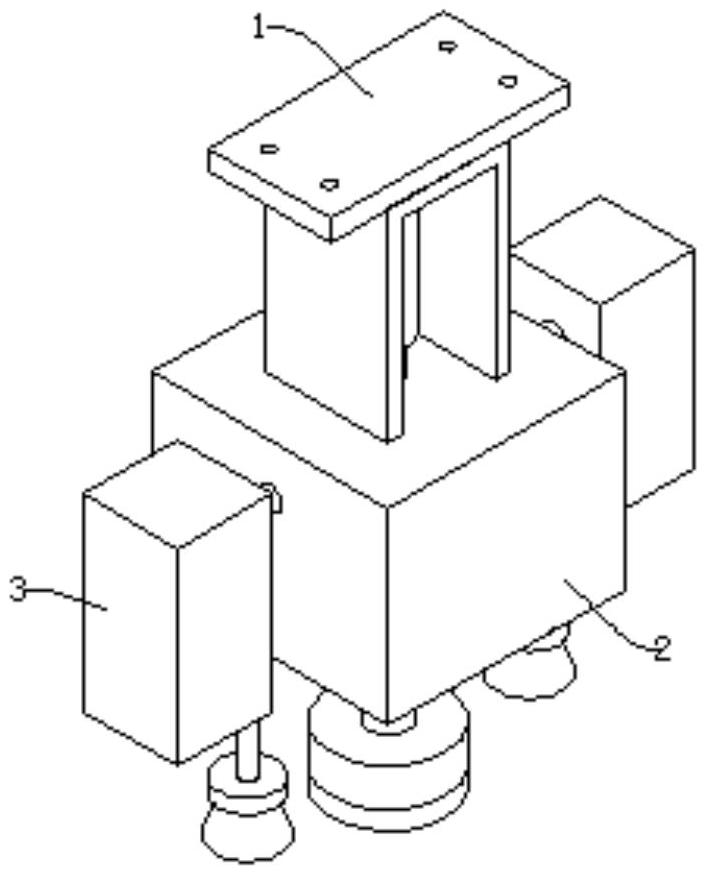
3、一种负压吸附式机械手,包括安装板,还包括用于对晶圆进行吸附固定的第一吸附机构,所述第一吸附机构固定在所述安装板下方;
4、所述第一吸附机构包括固定架、电动推杆、第一固定箱、第一活塞板、第一输气管、吸附组件,所述电动推杆安装在所述固定架上,所述第一固定箱安装在所述固定架下方,所述第一活塞板设置在所述第一固定箱内部,所述第一输气管安装在所述第一固定箱下方,所述吸附组件安装在所述第一输气管下端,所述吸附组件包括吸附座、过滤网、密封垫,所述过滤网安装在所述吸附座内部,所述密封垫安装在所述吸附座下方。
5、优选的,第二吸附机构安装在所述第一吸附机构两侧,所述第二吸附机构包括第二输气管、第二固定箱、伸缩组件、吸盘,所述第二固定箱安装在所述第二输气管一端,所述伸缩组件安装在所述第二固定箱上,所述吸盘安装在所述伸缩组件上。
6、优选的,所述伸缩组件包括弹簧、连接杆、第二活塞板、安装盘,所述连接杆设置在所述弹簧内侧,所述第二活塞板固定在所述连接杆上方,所述安装盘固定在所述连接杆下方。
7、优选的,所述第一固定箱与所述固定架焊接,所述第一输气管的材质为不锈钢。
8、优选的,所述密封垫与所述吸附座粘接,所述密封垫的材质为橡胶。
9、优选的,所述弹簧与所述第二固定箱焊接,所述弹簧的材质为高碳钢。
10、与现有技术相比,本实用新型的有益效果如下:
11、通过设置第一吸附机构,使用装置时,将装置安装在工作台上,工作台带动装置移动到晶圆上方,工作台驱动密封垫下降,密封垫下降与晶圆接触,工作台继续下降,密封垫被压缩,密封垫与晶圆之间的间隙逐渐缩小,密封垫压缩到一定程度时,启动电动推杆,电动推杆收缩带动第一活塞板上升,吸附座内的气压逐渐减小,晶圆在负压的作用下被固定在密封垫上,如此实现晶圆的吸附固定,密封垫能够提高装置吸附时的密封性,如此能够实现对晶圆的有效吸附,从而避免晶圆在搬运的过程中发生脱落。
技术特征:
1.一种负压吸附式机械手,包括安装板(1),其特征在于:还包括用于对晶圆进行吸附固定的第一吸附机构(2),所述第一吸附机构(2)固定在所述安装板(1)下方;
2.根据权利要求1所述的一种负压吸附式机械手,其特征在于:第二吸附机构(3)安装在所述第一吸附机构(2)两侧,所述第二吸附机构(3)包括第二输气管(301)、第二固定箱(302)、伸缩组件、吸盘(307),所述第二固定箱(302)安装在所述第二输气管(301)一端,所述伸缩组件安装在所述第二固定箱(302)上,所述吸盘(307)安装在所述伸缩组件上。
3.根据权利要求2所述的一种负压吸附式机械手,其特征在于:所述伸缩组件包括弹簧(303)、连接杆(304)、第二活塞板(305)、安装盘(306),所述连接杆(304)设置在所述弹簧(303)内侧,所述第二活塞板(305)固定在所述连接杆(304)上方,所述安装盘(306)固定在所述连接杆(304)下方。
4.根据权利要求1所述的一种负压吸附式机械手,其特征在于:所述第一固定箱(203)与所述固定架(201)焊接,所述第一输气管(205)的材质为不锈钢。
5.根据权利要求1所述的一种负压吸附式机械手,其特征在于:所述密封垫(209)与所述吸附座(206)粘接,所述密封垫(209)的材质为橡胶。
6.根据权利要求3所述的一种负压吸附式机械手,其特征在于:所述弹簧(303)与所述第二固定箱(302)焊接,所述弹簧(303)的材质为高碳钢。
技术总结
本技术公开了一种负压吸附式机械手,包括安装板,还包括用于对晶圆进行吸附固定的第一吸附机构,所述第一吸附机构固定在所述安装板下方。本技术通过设置第一吸附机构,使用装置时,将装置安装在工作台上,工作台带动装置移动到晶圆上方,工作台驱动密封垫下降,密封垫下降与晶圆接触,工作台继续下降,密封垫被压缩,密封垫与晶圆之间的间隙逐渐缩小,密封垫压缩到一定程度时,启动电动推杆,电动推杆收缩带动第一活塞板上升,吸附座内的气压逐渐减小,晶圆在负压的作用下被固定在密封垫上,如此实现晶圆的吸附固定,密封垫能够提高装置吸附时的密封性,如此能够实现对晶圆的有效吸附,从而避免晶圆在搬运的过程中发生脱落。
技术研发人员:焦点,王志远,郑自菲
受保护的技术使用者:郑州轨道交通信息技术研究院
技术研发日:20230609
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!