石墨舟装卸片机的制作方法
本技术涉及光伏制造设备,特别涉及一种石墨舟装卸片机。
背景技术:
1、随着时间的推移,化石能源的稀缺性越来越明显。在化石能源供应日趋紧张的背景下,太阳能作为人类取之不尽用之不竭的可再生能源,其特有的充分清洁性,绝对安全性,相对的广泛性。全自动石墨舟装卸片机作为光伏制造业自动化设备的典型代表,用于太阳能电池片生产过程中的pecvd工艺前后,将硅片自动装载到石墨舟中或将石墨舟中的硅片自动装载到片篮中,其具有自动化及生产效率高、减少人工与硅片的接触污染、大幅度增加取放片的稳定性等特点,被业界公认为光伏制造行业的重点设备。硅片在石墨舟内装卸需要机器人吸取硅片进行装卸,石墨舟从接驳设备流入硅片装卸设备,机器人需要先给石墨舟的一侧装卸硅片,给石墨舟的另一侧装卸硅片时,机器人的前端吸取装置需要旋转180°,装卸硅片时机器人运行的路径复杂,硅片装卸完成后再返回,机器人需要等待石墨舟再次流入硅片装卸设备,耗时较多,影响装卸效率。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种石墨舟装卸片机,解决了现有技术中装卸硅片时机器人运行的路径复杂,耗时较多,影响装卸效率的问题。
2、根据本实用新型实施例的石墨舟装卸片机,包括:
3、接驳机构,所述接驳机构上设置有第一石墨舟输送组件;
4、硅片装卸机构,与所述接驳机构并列设置,所述硅片装卸机构上设置有机器人和石墨舟循环输送组件,所述石墨舟循环输送组件围绕所述机器人设置,所述石墨舟循环输送组件包括第一装卸工位和第二装卸工位,所述第一装卸工位和所述第二装卸工位间隔设置,且位于所述机器人的相对两侧,所述第一石墨舟输送组件用于输送石墨舟至所述石墨舟循环输送组件以及从所述石墨舟循环输送组件接收石墨舟,所述机器人用于给石墨舟进行硅片装卸;
5、当石墨舟从所述第一装卸工位运送至所述第二装卸工位时,石墨舟靠近所述机器人一侧变为远离所述机器人一侧。
6、根据本实用新型实施例的石墨舟装卸片机,至少具有如下有益效果:
7、第一石墨舟输送组件可以接收上游设备的的石墨舟,并输送至石墨舟循环输送组件上,石墨舟靠近(或远离)机器人的一侧在第一装卸工位装卸硅片,石墨舟从第一装卸工位运送至第二装卸工位时,石墨舟上完成装卸的一侧变为远离(或靠近)机器人的一侧,石墨舟上未完成装卸的一侧变为靠近(或远离)机器人,使得位于第一装卸工位和第二装卸工位上的石墨舟等待机器人装卸的一侧均为靠近(或远离)机器人的一侧,使得机器人在给第一装卸工位和第二装卸工位上的石墨舟装卸硅片时,机器人的前端吸取装置不需要转动180°,装卸硅片时机器人运行的路径简化,石墨舟在第二装卸工位装卸硅片时,后续石墨舟可以流入第一装卸工位等待硅片装卸,可以减少机器人等待时间,提高装卸效率。
8、根据本实用新型的一些实施例,所述接驳机构设于所述硅片装卸机构沿所述硅片装卸机构的长度方向的一端,所述石墨舟循环输送组件呈u型布局设置,所述石墨舟输送组件的相对两端均靠近所述接驳机构设置,所述第一石墨舟输送组件用于输送石墨舟至所述石墨舟循环输送组件的一端以及从所述石墨舟循环输送组件的另一端接收石墨舟,所述第一装卸工位和所述第二装卸工位位于所述机器人沿所述硅片装卸机构的宽度方向的相对两侧。
9、根据本实用新型的一些实施例,所述石墨舟循环输送组件包括第二石墨舟输送组件、第三石墨舟输送组件和第四石墨舟输送组件,所述第二石墨舟输送组件和所述第四石墨舟输送组件间隔设置,且位于所述机器人沿所述硅片装卸机构的宽度方向的相对两侧,所述第一装卸工位位于所述第二石墨舟输送组件上,所述第二装卸工位位于所述第四石墨舟输送组件上,所述第二石墨舟输送组件用于接收所述第一石墨舟输送组件的的石墨舟,所述第三石墨舟输送组件用于将所述第二石墨舟输送组件上的石墨舟运输至所述第四石墨舟输送组件,所述第四石墨舟输送组件用于将石墨舟运输至所述第一石墨舟输送组件上。
10、根据本实用新型的一些实施例,所述第一石墨舟输送组件包括第一传送带组件和第一横移组件,所述第二石墨舟输送组件包括第二传送带组件,所述第三石墨舟输送组件包括第三传送带组件和第二横移组件,所述第四石墨舟输送组件包括第四传送带组件,所述第一传送带组件、所述第二传送带组件、所述第三传送带组件和所述第四传送带组件的运输方向为所述硅片装卸机构的长度方向,所述第一横移组件和所述第二横移组件的运输方向为所述硅片装卸机构的宽度方向。
11、根据本实用新型的一些实施例,所述第一传送带组件包括支座、传送电机、第一主动轮、第一从动轮和第一皮带,所述第一主动轮和所述第一从动轮转动安装在所述支座的相对两端,所述第一皮带套设在所述第一主动轮和所述第一从动轮上,所述传送电机的输出端连接所述第一主动轮。
12、根据本实用新型的一些实施例,所述第一横移组件包括滑轨、滑块、横移电机、第二主动轮、第二从动轮和第二皮带,所述滑块滑动连接在所述滑轨上,所述支座安装在所述滑块上,所述第二皮带套设在所述第二主动轮和所述第二从动轮上,所述横移电机的输出端连接所述第二主动轮,所述第二皮带连接所述支座。
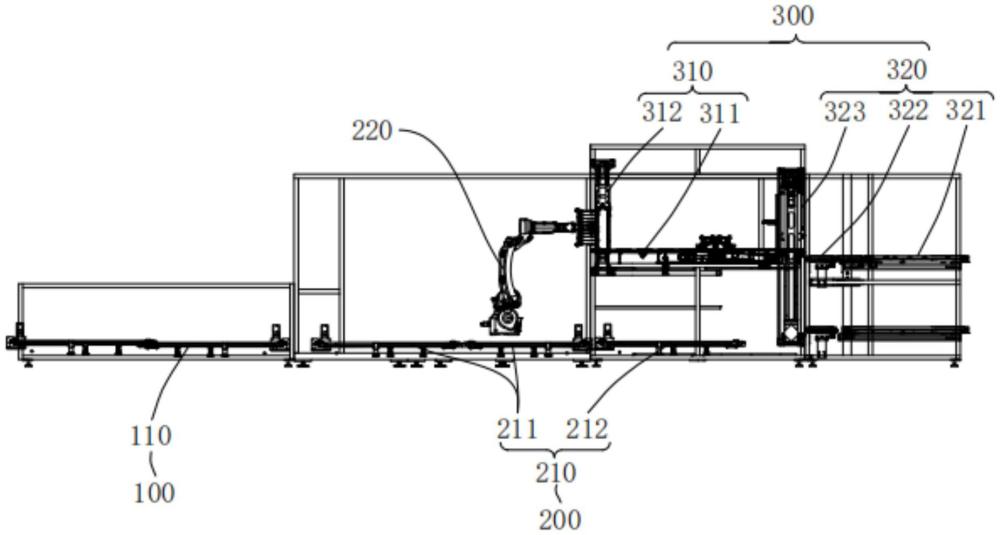
13、根据本实用新型的一些实施例,石墨舟装卸片机还包括硅片输送机构,所述硅片输送机构设于所述硅片装卸机构远离所述接驳机构一端,所述硅片输送机构包括硅片输送组件和片篮输送组件,所述硅片输送组件的一端位于所述第三石墨舟输送组件上方,且靠近所述机器人设置,所述片篮输送组件用于给所述硅片输送组件输送硅片或接收所述硅片输送组件的硅片。
14、根据本实用新型的一些实施例,所述硅片输送机构还包括硅片检测组件和不良品排出组件,所述硅片检测组件设于所述硅片输送组件一侧,用于检测所述硅片输送组件上的硅片,所述硅片检测组件包括面阵相机或线阵相机,所述不良品排出组件包括硅片移运组件和不良品盒,所述硅片移运组件用于将所述硅片检测组件检测不合格的硅片移运至所述不良品盒。
15、根据本实用新型的一些实施例,所述硅片输送组件包括硅片传送带组件和硅片堆叠组件,所述硅片堆叠组件靠近所述机器人设置,所述硅片传送带组件用于将所述片篮输送组件的硅片输送至所述硅片堆叠组件上或将所述硅片堆叠组件的硅片输送至所述片篮输送组件上,所述硅片堆叠组件用于将硅片堆叠方便所述机器人搬运。
16、根据本实用新型的一些实施例,所述片篮输送组件包括片篮传送带组件、片篮横移组件和片篮升降组件,所述片篮横移组件位于所述片篮传送带组件和所述片篮升降组件之间,所述片篮传送带组件用于片篮的上下料,所述片篮升降组件靠近所述硅片输送组件设置,用于将片篮内的硅片输送至所述硅片输送组件或接收所述硅片输送组件的硅片至片篮。
17、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种石墨舟装卸片机,其特征在于,包括:
2.根据权利要求1所述的石墨舟装卸片机,其特征在于,所述接驳机构设于所述硅片装卸机构沿所述硅片装卸机构的长度方向的一端,所述石墨舟循环输送组件呈u型布局设置,所述石墨舟输送组件的相对两端均靠近所述接驳机构设置,所述第一石墨舟输送组件用于输送石墨舟至所述石墨舟循环输送组件的一端以及从所述石墨舟循环输送组件的另一端接收石墨舟,所述第一装卸工位和所述第二装卸工位位于所述机器人沿所述硅片装卸机构的宽度方向的相对两侧。
3.根据权利要求2所述的石墨舟装卸片机,其特征在于,所述石墨舟循环输送组件包括第二石墨舟输送组件、第三石墨舟输送组件和第四石墨舟输送组件,所述第二石墨舟输送组件和所述第四石墨舟输送组件间隔设置,且位于所述机器人沿所述硅片装卸机构的宽度方向的相对两侧,所述第一装卸工位位于所述第二石墨舟输送组件上,所述第二装卸工位位于所述第四石墨舟输送组件上,所述第二石墨舟输送组件用于接收所述第一石墨舟输送组件的石墨舟,所述第三石墨舟输送组件用于将所述第二石墨舟输送组件上的石墨舟运输至所述第四石墨舟输送组件,所述第四石墨舟输送组件用于将石墨舟运输至所述第一石墨舟输送组件上。
4.根据权利要求3所述的石墨舟装卸片机,其特征在于,所述第一石墨舟输送组件包括第一传送带组件和第一横移组件,所述第二石墨舟输送组件包括第二传送带组件,所述第三石墨舟输送组件包括第三传送带组件和第二横移组件,所述第四石墨舟输送组件包括第四传送带组件,所述第一传送带组件、所述第二传送带组件、所述第三传送带组件和所述第四传送带组件的运输方向为所述硅片装卸机构的长度方向,所述第一横移组件和所述第二横移组件的运输方向为所述硅片装卸机构的宽度方向。
5.根据权利要求4所述的石墨舟装卸片机,其特征在于,所述第一传送带组件包括支座、传送电机、第一主动轮、第一从动轮和第一皮带,所述第一主动轮和所述第一从动轮转动安装在所述支座的相对两端,所述第一皮带套设在所述第一主动轮和所述第一从动轮上,所述传送电机的输出端连接所述第一主动轮。
6.根据权利要求5所述的石墨舟装卸片机,其特征在于,所述第一横移组件包括滑轨、滑块、横移电机、第二主动轮、第二从动轮和第二皮带,所述滑块滑动连接在所述滑轨上,所述支座安装在所述滑块上,所述第二皮带套设在所述第二主动轮和所述第二从动轮上,所述横移电机的输出端连接所述第二主动轮,所述第二皮带连接所述支座。
7.根据权利要求3所述的石墨舟装卸片机,其特征在于,还包括硅片输送机构,所述硅片输送机构设于所述硅片装卸机构远离所述接驳机构一端,所述硅片输送机构包括硅片输送组件和片篮输送组件,所述硅片输送组件的一端位于所述第三石墨舟输送组件上方,且靠近所述机器人设置,所述片篮输送组件用于给所述硅片输送组件输送硅片或接收所述硅片输送组件的硅片。
8.根据权利要求7所述的石墨舟装卸片机,其特征在于,所述硅片输送机构还包括硅片检测组件和不良品排出组件,所述硅片检测组件设于所述硅片输送组件一侧,用于检测所述硅片输送组件上的硅片,所述硅片检测组件包括面阵相机或线阵相机,所述不良品排出组件包括硅片移运组件和不良品盒,所述硅片移运组件用于将所述硅片检测组件检测不合格的硅片移运至所述不良品盒。
9.根据权利要求7所述的石墨舟装卸片机,其特征在于,所述硅片输送组件包括硅片传送带组件和硅片堆叠组件,所述硅片堆叠组件靠近所述机器人设置,所述硅片传送带组件用于将所述片篮输送组件的硅片输送至所述硅片堆叠组件上或将所述硅片堆叠组件的硅片输送至所述片篮输送组件上,所述硅片堆叠组件用于将硅片堆叠方便所述机器人搬运。
10.根据权利要求7所述的石墨舟装卸片机,其特征在于,所述片篮输送组件包括片篮传送带组件、片篮横移组件和片篮升降组件,所述片篮横移组件位于所述片篮传送带组件和所述片篮升降组件之间,所述片篮传送带组件用于片篮的上下料,所述片篮升降组件靠近所述硅片输送组件设置,用于将片篮内的硅片输送至所述硅片输送组件或接收所述硅片输送组件的硅片至片篮。
技术总结
本技术公开了一种石墨舟装卸片机,包括接驳机构和硅片装卸机构,接驳机构上设置有第一石墨舟输送组件,硅片装卸机构与接驳机构并列设置,硅片装卸机构上设置有机器人和石墨舟循环输送组件,石墨舟循环输送组件围绕机器人设置,石墨舟循环输送组件包括第一装卸工位和第二装卸工位,第一装卸工位和第二装卸工位间隔设置,且位于机器人的相对两侧,第一石墨舟输送组件用于输送石墨舟至石墨舟循环输送组件以及从石墨舟循环输送组件接收石墨舟,机器人用于给石墨舟进行硅片装卸,当石墨舟从第一装卸工位运送至第二装卸工位时,石墨舟靠近机器人一侧变为远离机器人一侧。本技术可以简化机器人的运行路径,提高装卸效率。
技术研发人员:余仲,周宏业,胡艳东,左晶,罗宁
受保护的技术使用者:深圳市捷佳伟创新能源装备股份有限公司
技术研发日:20230615
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!