圆柱电池长方向贴胶装置的制作方法
本技术涉及电池制造领域,特别涉及一种圆柱电池长方向贴胶装置。
背景技术:
1、现有技术中,种圆柱电池长方向贴胶时,常常是采用人工使用治具的方式,手动将胶带贴在圆柱电池上,因此速度慢、贴胶的一致性差。
技术实现思路
1、本实用新型提供了一种圆柱电池长方向贴胶装置,以解决至少一个上述技术问题。
2、为解决上述问题,作为本实用新型的一个方面,提供了一种圆柱电池长方向贴胶装置,包括:机架、料卷、真空平台、胶带夹持机构、胶带压紧机构、胶带切断机构、胶带吸取机构和送料机构,所述料卷、真空平台、胶带夹持机构、胶带压紧机构、胶带切断机构均安装在所述机架上,所述胶带夹持机构设置在所述真空平台的第一侧,所述胶带压紧机构设置在所述真空平台的第二侧,所述胶带夹持机构夹紧来自所述料卷的料带并能在靠近或远离所述真空平台的方向上运动,所述料带通过所述胶带压紧机构压紧在所述真空平台上,所述胶带切断机构设置在所述真空平台与所述胶带夹持机构之间,所述送料机构驱动所述胶带吸取机构及所述胶带吸取机构从所述真空平台上吸取的物料向待贴胶电池运动。
3、优选地,所述胶带夹持机构包括固定夹板、活动夹板和夹持气缸,所述固定夹板与活动夹板之间形成料带通道,所述夹持气缸驱动所述活动夹板向所述固定夹板的方向旋转以夹紧位于所述料带通道中的料带。
4、优选地,所述胶带夹持机构还包括移动架和用于驱动所述移动架移动的移动气缸,所述移动气缸设置在所述机架上,所述固定夹板固定安装在所述移动架上,所述活动夹板通过转轴可枢转地安装在所述移动架上,所述夹持气缸的一端与所述移动架可枢转地连接,所述夹持气缸的另一端通过连杆与所述转轴连接。
5、优选地,所述胶带压紧机构包括压带旋转气缸和压板,所述压带旋转气缸驱动所述压板向所述真空平台的顶部旋转以压紧所述真空平台上的料带。
6、优选地,所述胶带切断机构包括切带旋转气缸和切刀,所述切带旋转气缸驱动所述切刀在垂直于所述料带的平面内转动并切断所述料带。
7、优选地,所述胶带吸取机构包括吸料气缸和吸头,所述吸料气缸驱动所述吸头在竖直方向上升降运动。
8、优选地,所述送料机构包括送料气缸,所述送料气缸驱动所述胶带吸取机构沿水平方向在所述真空平台与所述待贴胶电池之间运动。
9、由于采用了上述技术方案,本实用新型可完成胶带卷料上料、送料,且可保证贴胶位置整齐一致,具有速度快、效率高、一致性高的特点。
技术特征:
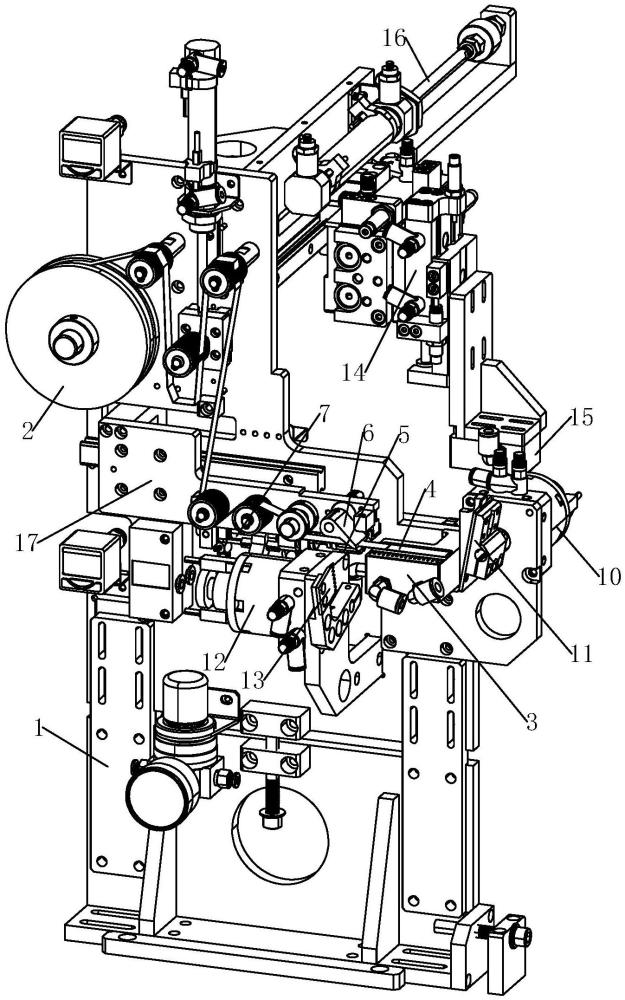
1.一种圆柱电池长方向贴胶装置,其特征在于,包括:机架(1)、料卷(2)、真空平台(3)、胶带夹持机构、胶带压紧机构、胶带切断机构、胶带吸取机构和送料机构,所述料卷(2)、真空平台(3)、胶带夹持机构、胶带压紧机构、胶带切断机构均安装在所述机架(1)上,所述胶带夹持机构设置在所述真空平台(3)的第一侧,所述胶带压紧机构设置在所述真空平台(3)的第二侧,所述胶带夹持机构夹紧来自所述料卷(2)的料带(4)并能在靠近或远离所述真空平台(3)的方向上运动,所述料带(4)通过所述胶带压紧机构压紧在所述真空平台(3)上,所述胶带切断机构设置在所述真空平台(3)与所述胶带夹持机构之间,所述送料机构驱动所述胶带吸取机构及所述胶带吸取机构从所述真空平台(3)上吸取的物料向待贴胶电池运动。
2.根据权利要求1所述的圆柱电池长方向贴胶装置,其特征在于,所述胶带夹持机构包括固定夹板(5)、活动夹板(6)和夹持气缸(7),所述固定夹板(5)与活动夹板(6)之间形成料带通道,所述夹持气缸(7)驱动所述活动夹板(6)向所述固定夹板(5)的方向旋转以夹紧位于所述料带通道中的料带(4)。
3.根据权利要求2所述的圆柱电池长方向贴胶装置,其特征在于,所述胶带夹持机构还包括移动架(17)和用于驱动所述移动架(17)移动的移动气缸(18),所述移动气缸(18)设置在所述机架(1)上,所述固定夹板(5)固定安装在所述移动架(17)上,所述活动夹板(6)通过转轴(9)可枢转地安装在所述移动架(17)上,所述夹持气缸(7)的一端与所述移动架(17)可枢转地连接,所述夹持气缸(7)的另一端通过连杆(8)与所述转轴(9)连接。
4.根据权利要求1所述的圆柱电池长方向贴胶装置,其特征在于,所述胶带压紧机构包括压带旋转气缸(10)和压板(11),所述压带旋转气缸(10)驱动所述压板(11)向所述真空平台(3)的顶部旋转以压紧所述真空平台(3)上的料带(4)。
5.根据权利要求1所述的圆柱电池长方向贴胶装置,其特征在于,所述胶带切断机构包括切带旋转气缸(12)和切刀(13),所述切带旋转气缸(12)驱动所述切刀(13)在垂直于所述料带(4)的平面内转动并切断所述料带(4)。
6.根据权利要求1所述的圆柱电池长方向贴胶装置,其特征在于,所述胶带吸取机构包括吸料气缸(14)和吸头(15),所述吸料气缸(14)驱动所述吸头(15)在竖直方向上升降运动。
7.根据权利要求6所述的圆柱电池长方向贴胶装置,其特征在于,所述送料机构包括送料气缸(16),所述送料气缸(16)驱动所述胶带吸取机构沿水平方向在所述真空平台(3)与所述待贴胶电池之间运动。
技术总结
本技术提供了一种圆柱电池长方向贴胶装置,包括:机架、料卷、真空平台、胶带夹持机构、胶带压紧机构、胶带切断机构、胶带吸取机构和送料机构,所述料卷、真空平台、胶带夹持机构、胶带压紧机构、胶带切断机构均安装在所述机架上,所述胶带夹持机构设置在所述真空平台的第一侧,所述胶带压紧机构设置在所述真空平台的第二侧,所述胶带夹持机构夹紧来自所述料卷的料带并能在靠近或远离所述真空平台的方向上运动。本技术可完成胶带卷料上料、送料,且可保证贴胶位置整齐一致,具有速度快、效率高、一致性高的特点。
技术研发人员:黄江闽
受保护的技术使用者:深圳市中裕达机械有限公司
技术研发日:20230719
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!