一种半导体晶圆清洗结构的制作方法
本技术涉及一种半导体晶圆清洗结构。
背景技术:
1、目前,随着芯片制造工艺先进程度的持续提升,对晶圆表面污染物的控制要求不断提高,每一步、刻蚀、沉积、扩散、去胶等重要性工序后,都需要一步清洗工序。由于清洗是介于酸槽与水槽之间,现有的自动化模组是水平、垂直方向搭载两台模组,因此,存在安装、复杂、步骤繁琐,结构冗余的问题。
技术实现思路
1、本实用新型是为了解决上述现有技术存在的问题而提供一种半导体晶圆清洗结构。
2、本实用新型所采用的技术方案有:
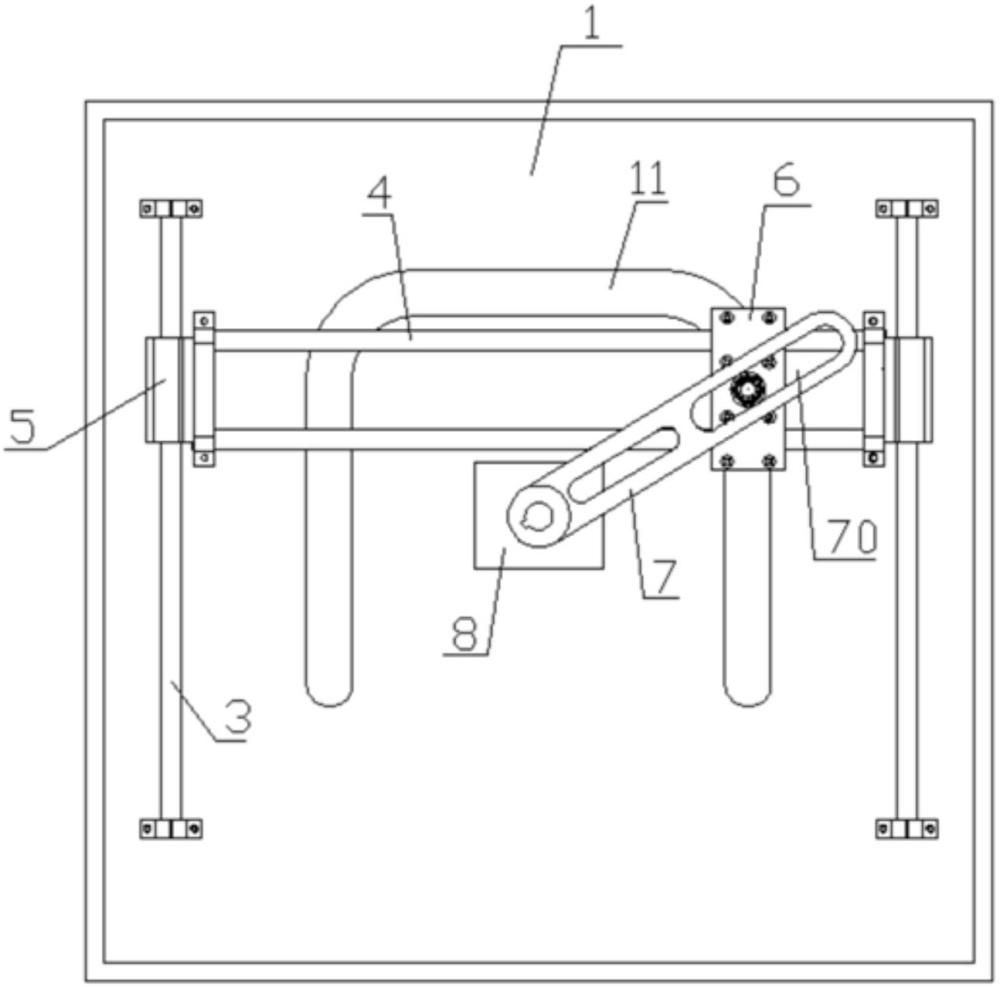
3、一种半导体晶圆清洗结构,包括安装座、吊篮、竖向导杆、横向导杆、竖向滑块、横向滑块、摆臂、电机和安装杆,所述竖向导杆固定于安装座上,横向导杆通过竖向滑块滑动连接在竖向导杆上,横向滑块滑动连接在横向导杆上,摆臂的一端与电机的转轴相连,另一端与横向滑块滑动连接,在安装座上设有u形槽,安装杆水平穿过u形槽并与横向滑块相连,吊篮与安装杆固定连接。
4、进一步地,所述横向滑块上设有轴承,在摆臂上设有腰型槽,所述轴承置于腰型槽内,使得摆臂与滑块滑动连接。
5、进一步地,所述摆臂上套设有轴套,轴套插接贯穿于u形槽。
6、进一步地,所述安装座上转动连接有密封片,密封片的转动中心与摆臂的转动中心同轴,在密封片上设有槽孔,安装杆依次穿过槽孔和u形槽并与横向滑块固定连接。
7、进一步地,所述安装杆的末端为矩形杆部,在吊篮上设有与所述矩形杆部相适配的矩形孔,吊篮插接在矩形杆部并通过螺钉相固定。
8、本实用新型具有如下有益效果:
9、本实用新型通过结构的设计,使用一个电机就能实现吊篮在酸槽与水槽之间来回运动,控制固定简单,机械装配结构稳定性好,便于维护,使用效果好。
技术特征:
1.一种半导体晶圆清洗结构,其特征在于:包括安装座(1)、吊篮(2)、竖向导杆(3)、横向导杆(4)、竖向滑块(5)、横向滑块(6)、摆臂(7)、电机(8)和安装杆(9),所述竖向导杆(3)固定于安装座(1)上,横向导杆(4)通过竖向滑块(5)滑动连接在竖向导杆(3)上,横向滑块(6)滑动连接在横向导杆(4)上,摆臂(7)的一端与电机(8)的转轴相连,另一端与横向滑块(6)滑动连接,在安装座(1)上设有u形槽(11),安装杆(9)水平穿过u形槽(11)并与横向滑块(6)相连,吊篮(2)与安装杆(9)固定连接。
2.如权利要求1所述的半导体晶圆清洗结构,其特征在于:所述横向滑块(6)上设有轴承(61),在摆臂(7)上设有腰型槽(70),所述轴承(61)置于腰型槽(70)内,使得摆臂(7)与滑块(6)滑动连接。
3.如权利要求1所述的半导体晶圆清洗结构,其特征在于:所述摆臂(7)上套设有轴套(71),轴套(71)插接贯穿于u形槽(11)。
4.如权利要求1所述的半导体晶圆清洗结构,其特征在于:所述安装座(1)上转动连接有密封片(13),密封片的转动中心与摆臂(7)的转动中心同轴,在密封片(13)上设有槽孔(131),安装杆(9)依次穿过槽孔(131)和u形槽(11)并与横向滑块(6)固定连接。
5.如权利要求1所述的半导体晶圆清洗结构,其特征在于:所述安装杆(9)的末端为矩形杆部,在吊篮(2)上设有与所述矩形杆部相适配的矩形孔,吊篮(2)插接在矩形杆部并通过螺钉相固定。
技术总结
本技术公开了一种半导体晶圆清洗结构,包括安装座、吊篮、竖向导杆、横向导杆、竖向滑块、横向滑块、摆臂、电机和安装杆,所述竖向导杆固定于安装座上,横向导杆通过竖向滑块滑动连接在竖向导杆上,横向滑块滑动连接在横向导杆上,摆臂的一端与电机的转轴相连,另一端与横向滑块滑动连接,在安装座上设有U形槽,安装杆水平穿过U形槽并与横向滑块相连,吊篮与安装杆固定连接。本技术通过结构的设计,使用一个电机就能实现吊篮在酸槽与水槽之间来回运动,控制固定简单,机械装配结构稳定性好,便于维护,使用效果好。
技术研发人员:李正乐,袁亚鸿,刘苏伟,李素华
受保护的技术使用者:南京攀诺德自动化设备有限公司
技术研发日:20230804
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!