无刷直流电马达及相关的控制方法与流程
[0001]
本发明涉及一种无刷直流电马达,该无刷直流电马达特别是旨在用于机动车辆设备。
背景技术:
[0002]
众多无刷直流电马达用在机动车辆设备、特别是雨刮器装置的齿轮马达中。
[0003]
无刷直流电马达可以具有许多优点,例如使用寿命长、整体尺寸减小以及功耗较低。
[0004]
然而,与有刷的电马达相比,对电马达的控制更为复杂,因为为了允许进行正确操作,必须准确地知道无刷直流电马达的转子的角位置。这是因为电马达包括定位在定子处、并且以交替的方式经由逆变器供电的电磁励磁线圈,以便驱动定位在转子上的永磁体。
[0005]
为了能够在最佳时刻切换逆变器开关并且因此切换对电磁线圈的供电,以向转子提供所需驱动,在状态切换期间需要至少通过具有一些精确的点的扇区来知道转子的位置(通常,对于梯形励磁,转子每旋转一圈切换六次)。
[0006]
为此目的,存在一种已知的使用霍尔效应传感器的方式,例如,以120
°
布置三个传感器,这三个传感器用于探测与切换操作相对应的六个精确点。
[0007]
对于具有六个极的马达,还存在两个霍尔效应传感器紧密放置在一起的组装形式,其中两个霍尔效应传感器必须相对于控制磁体的中心成10
°
的角度定位,以快速探测旋转方向。然而,由于可商购的传感器的大小,这样的组装往往是不可能的,特别是当控制磁体尺寸很小时,这些传感器整体尺寸使其无法获得所期望的角度。
[0008]
因此需要寻找一种解决方案,从而以有限的成本提供具有小的整体尺寸的无刷直流电马达。
技术实现要素:
[0009]
为此目的,本发明涉及一种无刷直流电马达,该无刷直流电马达包括:
[0010]-转子,该转子包括磁性元件和控制磁体,磁性元件围绕转子分布以形成电马达的极,控制磁体所具有的极对数量等于电马达的极对数量的三倍,
[0011]-定子,该定子具有电磁励磁线圈,
[0012]-至少第一霍尔效应传感器和第二霍尔效应传感器、优选地只有第一霍尔效应传感器和第二霍尔效应传感器,所述霍尔效应传感器被配置用于探测转子的预定角位置,
[0013]-控制单元,该控制单元被配置成根据该转子的位置向线圈施加用于驱动转子旋转的励磁信号的预定序列,
[0014]
其中,第一霍尔效应传感器和第二霍尔效应传感器被定位在印刷电路上并且被间隔开,使得在穿过控制磁体的中心并且分别穿过第一霍尔效应传感器和第二霍尔效应传感器的直线之间的角度大于或等于10
°
,并且其中,第一霍尔效应传感器用于确定励磁信号的切换时刻,并且第二霍尔效应传感器与第一霍尔效应传感器组合地使用,以在启动时刻确
定转子的旋转方向,或者就第一霍尔效应传感器和第二霍尔效应传感器而言,反之亦然。
[0015]
根据本发明的电马达还可包括以下方面:
[0016]-控制磁体和第一霍尔效应传感器和第二霍尔效应传感器被配置成使得所述第一霍尔效应传感器和所述第二霍尔效应传感器中的一个霍尔效应传感器和另一个霍尔效应传感器的状态改变分别在励磁信号的切换的时刻之前和之后发生,并且使得当转子以恒定速度旋转时,在霍尔效应传感器中的一个霍尔效应传感器的状态改变与励磁信号的切换的时刻之间的时间段等于在励磁信号的切换的时刻与另一个霍尔效应传感器的状态改变之间的时间段,控制单元使用超前于切换的时刻的霍尔效应传感器来确定切换的时刻,延后于切换的时刻的霍尔效应传感器与超前于切换的时刻的霍尔效应传感器组合地使用,以用于在启动时刻确定转子的旋转方向。
[0017]-在穿过控制磁体的中心并且分别穿过第一霍尔效应传感器和第二霍尔效应传感器的直线之间的角度小于19
°
。
[0018]-在穿过控制磁体的中心并且分别穿过第一霍尔效应传感器和第二霍尔效应传感器的直线之间的角度大致等于16
°
。
[0019]
本发明还涉及一种特别是用于雨刮器装置的齿轮马达,该齿轮马达包括:
[0020]-如以上所描述的电马达。
[0021]
本发明还涉及一种用于控制无刷直流电马达的方法,所述电马达包括:
[0022]-转子,该转子包括磁性元件和控制磁体,磁性元件围绕转子分布以形成电马达的极,控制磁体所具有的极对数量等于电马达的极对数量的三倍,
[0023]-定子,该定子具有电磁励磁线圈,
[0024]-至少第一霍尔效应传感器和第二霍尔效应传感器、优选地只有第一霍尔效应传感器和第二霍尔效应传感器,所述霍尔效应传感器被配置用于探测转子的预定角位置,
[0025]-印刷电路,在它上面定位有第一霍尔效应传感器和第二霍尔效应传感器,两个霍尔效应传感器被间隔开,使得在穿过控制磁体的中心并且分别穿过第一霍尔效应传感器和第二霍尔效应传感器的直线之间的角度大于或等于10
°
,
[0026]
该方法包括:
[0027]-根据转子的位置确定要向线圈施加的驱动转子旋转的励磁信号的预定序列的预备步骤,
[0028]-基于霍尔效应传感器中的一个霍尔效应传感器供应的信号确定励磁信号的切换的时刻的步骤,
[0029]-基于霍尔效应传感器供应的信号确定转子的旋转方向的步骤,
[0030]-基于所确定的切换的时刻施加励磁信号的预定序列的步骤。
[0031]
根据本发明的另一个方面,控制磁体和第一霍尔效应传感器和第二霍尔效应传感器被配置成使得所述第一霍尔效应传感器和第二霍尔效应传感器的状态改变分别在励磁信号的切换的时刻之前和之后发生,并且使得当转子以恒定速度旋转时,在霍尔效应传感器中的一个霍尔效应传感器的状态改变与励磁信号的切换的时刻之间的时间段等于在励磁信号的切换的时刻与另一个霍尔效应传感器的状态改变之间的时间段,基于由超前于切换的时刻的霍尔效应传感器供应的信号确定切换的时刻,延后于切换的时刻的霍尔效应传感器与超前于切换的时刻的霍尔效应传感器组合地使用,以用于在启动时刻确定转子的旋
转方向。
附图说明
[0032]
通过非限制性示例给出的以下描述并参考附图,本发明的其他特征和优点将变得明显,在附图中:
[0033]-图1示出了根据本发明的具有集成(或嵌入或埋入)的磁体的电马达的简图,
[0034]-图2示出了电马达的供电电路的简图,
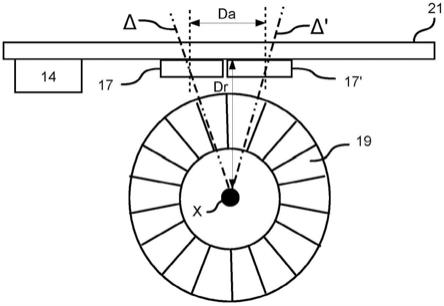
[0035]-图3示出了霍尔效应传感器的和相关的控制磁体的简图,
[0036]-图4示出了根据第一配置的从霍尔效应传感器发出的信号的简图,
[0037]-图5示出了根据第二配置的从霍尔效应传感器发出的信号的简图,
[0038]-图6示出了用于控制根据本发明的电马达的方法的步骤的流程图。
[0039]
在所有附图中,相同的元件被赋予相同的附图标记。
具体实施方式
[0040]
以下实施例是示例。尽管描述涉及一个或多个实施例,但这并不表明每个参考涉及相同的实施例,或并不表明特征可仅适用于单个实施例。不同实施例的简单特征也可组合或互换,以提供其他实施例。
[0041]
本发明涉及一种无刷直流电马达,例如用在机动车辆设备中的电马达,诸如雨刮器装置的齿轮马达。本发明还涉及这样的齿轮马达。
[0042]
图1示出了电马达的局部示意图,该电马达包括可绕旋转轴线x旋转地安装的转子3,并且包括多个极。极例如由永磁体5形成,永磁体围绕转子3的旋转轴线x分布、并且被配置为形成交替的南极和北极。
[0043]
电马达还包括定子7,该定子包括形成电马达的相的多个电磁励磁线圈9,电磁励磁线圈在被供电时使得能够由于在电磁励磁线圈9与转子3的极之间的相互作用而驱动转子3旋转。
[0044]
图2示出了电马达1的相的供电电路的示例的简图。在当前情况下,电马达1包括三个相,这三个相以a、b和c表示、呈三角形布置、连接至中点。供电电路包括逆变器10。逆变器10包括三个分支b1、b2和b3,这三个分支并联地布置、并且连接至电压源13的端子。每个分支b1、b2、b3包括串联布置的两个开关15。开关15的断开和闭合由控制单元14来控制,控制单元例如采用微控制器或微处理器的形式。分支b1、b2和b3的中点分别连接至电马达1的相a、b和c。
[0045]
然而,为了使得控制单元14能够以最佳方式实现开关15的断开和闭合,以使转子3沿所期望的旋转方向以所期望的速度旋转,至关重要的是精确地获知转子3每60电角度的位置。
[0046]
为此目的,如图3所示,第一霍尔效应传感器17耦联至控制磁体19,控制磁体包括多个极,极的数量等于电马达1的极的数量的三倍,例如对于包括六个极的电马达1,控制磁体就包括十八个极,使得霍尔效应传感器17的状态改变(从高电平改变到低电平,或反之亦然)每60电角度(即,对于具有六个极的电马达来说20
°
)发生一次。
[0047]
为了确定转子3在启动时刻的旋转方向,还使用了第二霍尔效应传感器17'。这个
第二霍尔效应传感器17'例如与第一霍尔效应传感器17联接至相同的控制磁体19。
[0048]
另外,为了减小电马达1的成本和整体尺寸,第一霍尔效应传感器17和第二霍尔效应传感器17’必须被集成到印刷电路21中,这限制了相对于控制磁体19定位霍尔效应传感器17、17’的可能性。
[0049]
在电马达1包括六个极、也就是说三对极的情况下,逆变器10的切换必须每20
°
发生一次。因此,为了探测转子3在启动时的旋转方向,第二霍尔效应传感器17’必须被定位成使得垂直于旋转轴线x并且分别穿过第一霍尔效应传感器17的中心和第二霍尔效应传感器17’的中心的直线δ和δ'形成10
°
的角度。这意味着在两个霍尔效应传感器17和17’的中心之间的距离da由以下等式给出:
[0050]
da=2*dr*tan(10/2)
[0051]
其中,dr为在控制磁体19的旋转轴线x与印刷电路21之间的距离。还必须考虑传感器17和17’的保护壳体的大小。壳体的形状例如为平行六面体,并且霍尔效应传感器位于平行六面体的中心。壳体的宽度例如在2mm到3mm之间,并且壳体的高度例如在1.5mm与2.5mm之间。因此,可确定两个霍尔效应传感器17和17’必须隔开以符合10
°
的角度的距离。如果这个距离小于壳体的宽度(当使用小直径的控制磁体19时的情况),无法符合10
°
的角度。为了避免不得不增大控制磁体19的直径而因此增大电马达1的整体尺寸,两个传感器17和17'尽可能靠近彼此地布置在印刷电路21上,并且根据所得的在穿过控制磁体19的中心并且分别穿过第一霍尔效应传感器17的中心和第二霍尔效应传感器17’的中心的两条直线δ和δ'之间的角度来适配信号处理。因此,在此示例中,这个角度大于10
°
,例如是14
°
。在这种情况下,霍尔效应传感器17、17’和控制磁体19被配置成获得相超前信号(signal en avance de phase),如以下参考图5描述的那样。
[0052]
图4示出了在传感器17和17'被定位成使得在穿过控制磁体19的中心并且分别穿过第一霍尔效应传感器17和第二霍尔效应传感器17’的两条直线δ和δ’之间的角度等于10
°
的情况下,由第一霍尔效应传感器17和第二霍尔效应传感器17’获得的信号。第一霍尔效应传感器17的状态改变与切换的时刻相对应,并且第二霍尔效应传感器17’的状态改变按照某一时间间隔发生,当转子3以恒定速度旋转时,该时间间隔的持续时间等于第一霍尔效应传感器17的状态改变的持续时间。第二霍尔效应传感器17’与第一霍尔效应传感器17组合地使用来以确定转子3的旋转方向。有利地,还可进行中间切换操作,以产生较小的间隔并且进一步减小马达产生的噪音。
[0053]
如果在穿过控制磁体19的中心并且分别穿过第一霍尔效应传感器17和第二霍尔效应传感器17’的两条直线δ和δ’之间的角度大于或等于10
°
、例如为14
°
,则霍尔效应传感器17和17’和控制磁体19被配置成使得霍尔效应传感器17和17’的状态改变超前于切换的时刻发生,这对于霍尔效应传感器17和17’是相等的,一个霍尔效应传感器沿转子3的第一旋转方向超前,而另一个霍尔效应传感器沿转子的第二旋转方向超前,如图5中示意性示出的那样。因此,在此配置中,用于确定切换的时刻的信号是第一霍尔效应传感器17发出的信号或是第二霍尔效应传感器17’发出的信号,这取决于转子3的旋转方向。另一个霍尔效应传感器17、17’(延后于切换的时刻)与用来确定切换的时刻的霍尔效应传感器17、17’组合地使用,以便确定转子3的旋转方向。
[0054]
因此,这种配置使得可使用小直径控制磁体19,同时将两个霍尔效应传感器17、
17’定位在印刷电路上,以便提供具有小的整体尺寸的电马达1。此外,通过使用供应相超前信号的霍尔效应传感器17、17’,可获得高运转扭矩,而无需对霍尔效应传感器17、17’传输的信号进行电子处理。
[0055]
应当注意到的是,两个传感器可具有相同的状态或不同的状态。不同的状态指示切换不接近,而相同的状态指示切换区域接近。如果两个传感器已经偏置,以便偏置两个切换操作,则可给予一个切换操作相对于另一个切换操作的优先级,以确定马达的旋转方向。
[0056]
本发明还涉及一种用于控制如以上所描述的电马达的方法。现在将参考图6中的流程图描述方法的不同步骤。
[0057]
第一步骤101涉及根据转子3的位置确定要向线圈9施加的用于驱动转子3旋转的励磁信号的预定序列的预备步骤。这个确定与对逆变器10的开关15的位置(断开或闭合)的确定相对应,逆变器允许根据转子3的角位置为线圈9供电。
[0058]
第二步骤102对应于基于霍尔效应传感器中的一个霍尔效应传感器17或17’供应的信号确定励磁信号的切换的时刻。选择霍尔效应传感器17、17’来确定励磁信号的切换的时刻例如取决于转子3的旋转方向。在这种情况下,可使用一个霍尔效应传感器来确定马达的位置并且可使用另一个霍尔效应传感器来确定转子的旋转方向。
[0059]
步骤103对应于基于两个霍尔效应传感器17和17’供应的信号来确定转子3的旋转方向。
[0060]
步骤104涉及根据步骤102中确定的切换的时刻来施加步骤101中确定的励磁信号的序列。
[0061]
通过使用霍尔效应传感器(其中在穿过控制磁体19的中心并且分别穿过第一霍尔效应传感器17和第二霍尔效应传感器17'的两条直线δ和δ’之间的角度大于或等于10
°
,如以上所描述的那样)的位置,获得了相超前信号,从而产生高运转扭矩。获得这种相超前而无需对霍尔效应传感器17、17’传输的信号进行电子处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1