储能系统的制作方法
1.本发明涉及储能系统,具体涉及飞轮储能系统,其尤其可用于电网的负载平衡以及支持电动车充电基础设施。
背景技术:
2.在传统电力系统和电网中,供电必须满足精确到秒的需求。在未来的能源管理中,为了避免服务中断、系统不平衡、以及可再生能源系统的能源成本增加和无用的削减,eess(电能存储系统)会起到重要作用。
3.发电机需要实现两个基本功能:一是供电基本负荷即每半小时基础上的最低能源需求(预测算法和历史数据可用于预测能源需求);二是通过英国国家电网公司采购的服务(例如ffr(固定频率响应)服务)进行频率调节。这项ffr服务对电网具有很高的价值,因为它可以平衡每秒过高/过低的电力供应。对于此服务,由于需要进行短至中等持续时间的高功率无功负载,因此功率优先于能量;之后,根据持续时间/能量需求来采购其他服务。
4.在如今的市场上,因为基本负荷响应时间较慢且无法对需求变化做出快速反应,因此通过核能或煤炭发电为其供电。燃气发电会更加灵活,且可以和抽水蓄能与可再生技术一起弥补瞬时负荷调节的不足。当然,对于这种系统的主要要求是,其可用性永久且恒定。
5.风能和太阳能等可再生能源的主要问题是,由于它们依赖天气状况,因此不能保证系统永久可用。如此多变且不可预测的本性可能会严重限制基于可再生能源的系统。2016年,由于无法有效地存储和管理能源产生,超过1twh的风力发电被削减。在这种情况下,如果可再生能源在稳健的电网世界中扮演重要角色,则eess必不可少。
6.飞轮储能系统(fess)是一种特殊类型的储能系统,其中能量通过飞轮的旋转以动能的形式储存于系统中。当前最先进的并网fess方案在设计上遇到的挑战是,需要存在一独立的电动机/发电机(m/g)及一外部安全壳系统,以应对发生故障时所产生的高破坏力。此两体方案因存在许多组件而可能会在结构上非常笨重。此外,由于飞轮理想地在真空中运行,因此m/g与主机体之间的旋转真空密封接头的存在会产生另一个问题,即它是效率低下的主要来源之一。
技术实现要素:
7.所附权利要求中陈述了本发明的各方面和各实施例,同时说明书也描述了本发明的这些和其他的方面及实施例。
8.根据本发明的一个方面,提供了一种储能系统,其包括:具有转子和定子的开关磁阻电动机,其中转子构造成能够用作用于存储能量的飞轮;围住转子和定子的机壳,其中转子受撑以在机壳上旋转;以及用于支撑机壳的底座,其中储能系统构造成使得在使用中转子的轴线通常是水平的。
9.通过为转子/飞轮提供水平的轴线,从而提供垂直方向的飞轮,系统可以在地面上
占用更少的空间(即,与利用水平轴线安装的系统时相比,本系统的“占地面积”更小),这意味着可用空间的利用率可以提高。例如,可以以阵列的方式设置多个飞轮系统,其中小的形状因子可能有利于允许在给定区域中提供更多的此类系统(从而增加了可由阵列存储的能量数量)。此外,通过在水平轴上设置系统,可能更容易就地重新润滑轴承(因为无需到达转子的上方和下方)。
10.另外,如果在车辆中使用飞轮,则为飞轮提供水平轴而不是垂直轴可以提高稳定性。垂直定向的飞轮可能会导致不良的陀螺效应,需要对其加以控制。缓解这种情况的一种典型方法是设置两个反向旋转的飞轮来平衡外部转矩。但是,这需要飞轮的定位和角速度相匹配。本系统可以只允许使用一个飞轮,而不会产生影响车辆操纵的幅度和方向的陀螺效应。
11.优选地,转子设置在定子内。也就是说,定子可以设置在转子周围。定子可以是空心圆柱体的形式,而转子可以是圆柱形的,可选地与定子的内表面相一致。转子可以设置成与定子同心地对准。转子可被构造成可在定子内旋转。
12.优选地,转子和定子具有相同的深度。深度定义为平行于圆柱形中心轴线(即平行于转子的轴线)的尺寸。深度与直径垂直。优选地,转子的深度小于转子的直径。优选地,定子的深度小于定子的直径。例如,转子和/或定子的深度可以分别小于转子和/或定子的直径的一半。优选地,机壳的深度小于机壳的直径。例如,机壳的深度可以小于机壳的直径的一半。这种结构可以有助于提供如本文所述的小的占地面积。优选地,底座的深度小于底座的宽度,并且更优选地小于机壳的宽度。
13.另外,使用开关磁阻电动机(srm)的设计可以允许提供无磁体或稀土金属的系统。反过来,这可以减少所需组件的总数。此外,由于无需使用已知系统的许多非金属部件,分离的飞轮部件的缺少可大大降低了系统的投入成本和部件数量。
14.优选地,机壳大致呈圆柱形,以适合于转子和定子的形状。在机壳的圆形表面上,由机壳和底座相交的部分所限定的弦杆可以大于圆形表面的半径并且小于圆形表面的直径。
15.机壳可部分嵌入底座中。底座的宽度可以大于机壳嵌入底座的部分的宽度,底座的宽度垂直于转子的轴线。底座的形状可以做成被机壳切去的三棱柱的一部分。可选地,底座的深度不超过机壳的深度,机壳的深度平行于转子的轴线,优选地,机壳的深度由转子的轴杆的长度限定。
16.机壳可包括在外表面上用于辅助散热的多个散热片。机壳可以构造成在使用中发生故障时将转子的一部分容纳在机壳内。机壳可以抽成真空以供使用。
17.优选地,底座构造成在使用中安装在地基上。机壳的直径可以在600mm和1400mm之间,优选地在900mm和1100mm之间,更优选地在960mm和1000mm之间。
18.转子可支撑在轴杆上进行旋转,该轴杆旋转在滚动元件轴承上,该滚动元件轴承设置在机壳上。轴承可以是深槽径向混合轴承。轴承和轴杆之间可以设置有可压缩式部件。
19.定子可以包括围绕转子定位的多个电绕组。转子可以包括多于6个转子磁极,优选地至少8个转子磁极,更优选地至少10个,还更优选地至少12个,最优选地至少14个。优选地,开关磁阻电动机具有16/14级结构。
20.转子和定子各自可以由多个叠片形成,优选地,多个叠片中的每个叠片具有1mm或
更小的宽度。转子的至少一外部区域可以由铁磁材料制成。
21.根据本发明的一方面,提供了一种储能装置,其包括多个如本文所述的储能系统。储能装置还可以包括一个或多个电力电子部件,每个电力电子部件用于控制至少两个储能系统的运行。储能装置还可以包括用于将交流电(ac)转换成直流电(dc)的装置,从而允许将ac从电网输入到设备中。储能装置还可以包括用于将直流电(ac)转换为交流电(dc)的装置,从而允许将ac从储能装置输出到电网。储能装置还可以包括用于控制储能系统的运行的主控制器。
22.根据本发明的另一方面,提供了一种储能系统,其包括:开关磁阻电动机,其包括转子和定子,其中转子构造成能够用作用于存储能量的飞轮;围住转子的机壳,其中该机壳包括用于支撑转子的轴承;以及从下方支撑机壳的底座,其中储能系统构造成使得在使用中转子的轴线通常是水平的。
23.根据本发明的另一方面,提供了一种储能系统,其包括:开关磁阻电动机,其包括转子和定子,其中转子构造成能够用作用于存储能量的飞轮;包围转子和定子的机壳,其中转子被支撑以在机壳上旋转;以及用于支撑机壳的底座;其中,转子包括多于6个定子磁极,优选地至少8个转子磁极,更优选地至少10个,还更优选地至少12个,最优选地至少14个。优选地,开关磁阻电动机具有16/14级结构。
24.本发明通常可涉及将飞轮集成到开关磁阻电动机(srm)中以允许更有效的飞轮能量存储。转子部件可以充当存储能量的飞轮。这旨在例如在公用事业级别上平衡电网上的供需。在一个示例中,一种应用可能是平衡电网频率——在英国和世界大多数地区为50hz,在美国为60hz。系统的使用可能会因电网的需求而变化。由于能量是由间歇式发电机(例如可再生发电机)产生的,多余的能量可以通过飞轮引入。如果发电量输出突然下降(例如风力发电量下降),则可以输出飞轮存储的能量,并将其用于在中短期内平衡电网。
25.因此,本发明通过将m/g和惯性功能都整合到转子主体中并且将定子集成在外部安全壳中来重新组织典型fess的整个结构,从而实现简单的整体解决方案。这一概念带来的额外好处可在于简化机械结构并去除所有低惯性旋转零件(例如传动接头),并因此减少总的部件数量。
26.本发明可扩展至基本上如本文所描述和/或如参考附图所作说明的方法、系统和装置。
27.本发明的一个方面中的任何特征可以以任何适当的组合方式应用于本发明的其他方面。特别地,方法方面可以应用于装置方面,反之亦然。如本文所使用的,装置加功能特征可以可选地以其对应的结构(例如适当编程的处理器和相关联的存储器)进行表达。
28.而且,植入硬件中的特征通常都可以用软件来实现,反之亦然。因此,凡提及本文的软件和硬件特征,均应据此解释。
29.本文所用的术语“转子”和“飞轮”在应用于本发明描述的上下文中应理解为同义词(但在任何已知系统所描述的上下文中均不做这样的理解,因为在这些系统中它们通常是独立的组件)。
30.本文所用的术语“通常是水平的”(其用于谈及轴线时)优选地表示与一表面(其上安装着系统)呈
‑
30
°
至30
°
之间的角度,更优选地该角度为
‑
20
°
至20
°
,又更优选地该角度为
‑
10
°
至10
°
,仍更优选地该角度为
‑5°
至5
°
,最优选地该角度为
‑1°
至1
°
。
31.本文所用的术语“大致”优选地表示误差容限小于10%,更优选地该误差容限小于10%,又更优选地该误差容限小于5%,仍更优选地该误差容限小于1%。
32.还应当理解,可以独立地实现和/或提供和/或使用在本发明的任何方面中描述和定义的各种特征的特定组合。
附图说明
33.下面将仅通过示例的方式并参考附图来描述本发明,其中:图1示出了本发明一示例性实施例的储能系统;图2a示出了示例性的深槽径向轴承和示例性的角接触轴承的截面图;图2b示出了组装在储能系统中的示例性的轴与轴承装置的侧视图;图3示出了组装后的储能系统;图4a示出了一实施例中的系统的转子;图4b示出了一实施例中的转子的叠片;图5a示出了一实施例中的系统的定子;图5b示出了一实施例中的定子的叠片;图6a示出了已发生故障的转子601的一部分的仿真结果;图6b示出了已故障的转子的一叠片的仿真结果;图7示出了一大批储能系统的安装的示例;图8示意性地示出了一大批的储能系统和支撑元件部分。
具体实施方式
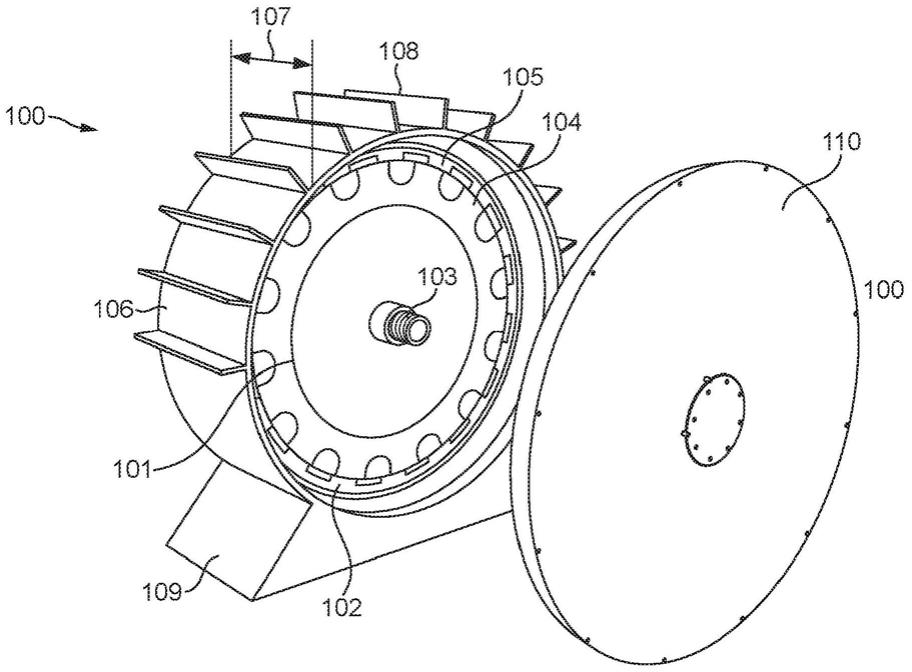
34.图1示出了一种储能系统100,其包括具有转子101和定子102(其含有未示出的绕组)的开关磁阻电动机(srm)。转子101设置成能够充当飞轮以存储能量。电动机设置成使得转子的轴线在使用中通常是水平的。系统包括轴杆103(也称“短轴”或“轴类件”),其界定了转子的轴线。转子的轴线垂直于转子的平面,使得转子101绕转子的轴线旋转。
35.如电动机设计中常见的那样,转子101大致呈圆柱形,并具有基本上为圆形的横截面,而定子102可以是用于在其中容纳转子101的空心圆柱体。转子101可以设置在固定定子102的内圆柱表面内,并且构造成绕转子的轴线旋转。为了实现良好的磁耦合,转子的径向外围非常靠近定子的绕组。系统100还包括用于控制系统100的运行的电力电子和控制装置。
36.在开关磁阻电动机中,当向定子绕组提供电流并对其通电时,绕组形成定子磁极。当定子绕组通电时,相应的可旋转转子磁极与通电的固定定子磁极对齐。这可用于控制转子的旋转。在使用中,如果将电流提供给未与转子上的磁极对准的一对定子绕组,则转子将承受转矩作用。通过相对于转子角位置控制提供给定子绕组的电流,可以沿任一旋转方向驱动电动机,或者可以把电动机设置成能产生电能。通过控制转子的运行速度,可以控制输入到系统或从系统输出的相关能量。
37.转子101包括多个径向地向外延伸的突出区域104。这些突出区域104形成转子101的磁极。转子101的突出区域104至少由诸如钢等的铁磁材料制成。在一些实施例中,转子101整个由铁磁材料制成;而在其他实施例中,仅转子101的突出区域104或外部区域由铁磁
材料制成。这些突出区域104绕转子101的圆周等距间隔。如图1所示,转子101包括14个转子磁极。定子102环绕着转子101。定子102包括围绕其内圆柱表面的多个突起105。在使用中,每个突起105包括电绕组,形成定子102的磁极。绕组直接连接至系统100的电源转换器。如图1所示,定子102包括形成16个定子磁极的16个绕组;如此形成了具有16/14级结构的开关磁阻电动机。
38.srm在电源输送至其时作电动机用,而在从其处输送出电源时作发电机用。众所周知,srm是一种步进电机,其凸极式转子磁极与定子磁极数量上不相等。转子上没有绕组或永磁体。srm电力电子器件还包括给srm供电的多个栅极驱动器。栅极驱动器为诸如igbt(绝缘栅双极型晶体管)之类的开关提供高电流驱动。在其他实施例中,可以使用场效应晶体管(例如mosfet或晶闸管)代替igbt。
39.srm具有可使其非常适合当下应用的许多特殊优势。特别地,简单但稳健的转子结构能作为惯性源(即飞轮)使用,而无需外部设施或复杂设计(比如pms、转子条或者励磁线圈)。使用srm还可以使系统的制造成本低廉,因为从材料和制造角度而言,pms或转子条都意味着增加了成本。
40.系统的srm设计受使用转子作为飞轮存储能量这一需求的影响。飞轮中存储的动能(e
k
)与极惯性矩(j)、转速的最大和最小平方之间的差(ω
max
和ω
min
)成正比,如式(1)所示:e
k
=1/2[j(ω
max2 —ω
min2
)]
ꢀꢀꢀꢀꢀ
(1)飞轮旋转得越快,它可以存储的能量就越多。本系统通常旨在存储大量能量。例如,在转速为0至16000 rpm之间时,系统可以存储高于15kwh的电能。这样的蓄电特性能让系统有效地储能,尤其可用于负载平衡。
[0041]
为了获得期望的蓄电特性,通常需要x=7.5的高速度比(即最大旋转速度和最小旋转速度之比)。表贴式永磁体(spm)机器的速度比非常差(x = 2),内置式永磁体(ipm)机器和感应电动机(im)的速度比大约为4,而同步磁阻(synrel)机器可以达到的最高速度比为6。大多数srm可达到的最高速度比为4。srm达到所需的高速度比并不常见,因此需要一种新的srm设计。
[0042]
开关磁阻电动机的通常设计是6/4级结构,其具有6个转子磁极和4个定子磁极,并使用三相电源。在许多应用中,不需要使用超过6/4的级结构,就控制电子和电力电子而言,这会增加成本和复杂性。特别地,对传统srm而言,磁极数的增加会增多所需开关的数量,这通常是不利的,因为这种情形下至少电噪声会明显加重。
[0043]
然而,在本发明的系统中,转子本身用于飞轮储能,通常期望提供更多的磁极数以能让系统实现高的速度比。特别地,高的相位数(对应于高的磁极数)可减少每个相位需要的转矩,从而结果是通量和伪反电动势在高速运行中都较小,这可能会改善系统的性能。考虑到飞轮的大尺寸和大重量,转矩的减小显得特别重要。
[0044]
因此,本发明的系统使用16/14级结构(即具有16个转子磁极和14个定子磁极的结构)。在这种情况下,将使用八相电源。飞轮的大电源输入和输出取决于相位数和可以分担负载的igbts。例如,对于需要的240 nm转矩,如果使用6/4级结构,则每个相位必须设计为全240nm转矩。但是,在16/14级结构中,四个相位能够在同一瞬间导通,因此每个相位可以设计为60nm(总转矩的四分之一)。
[0045]
在本发明的系统中,飞轮的物理尺寸(其相对较大,从而可存储大量能量)也可以出于控制目的而引起使用具有相对较高的磁极数的级结构配置。如果使用常见的6/4级结构,则由于每个相位需要提供较大的转矩以使转子旋转,因此该系统的可控性会较差,并且可能会遭受更高的振动(这将损害机器的使用寿命)。使用更多的磁极可以更精确地控制转子的旋转。
[0046]
与其他结构(例如6/4电动机)相比,16/14级结构可能会对设计有很大帮助。设计的几何形状,例如本发明的系统中特定的角度和极长度,可以最大化用于大规模储能目的的系统效率。此外,随着磁极数的增加,转矩波动减小,因此系统性能得以提高。
[0047]
系统100还包括把转子101和定子102围住的机壳106(“框架”),在一些情况下,定子102可以耦接至机壳106。机壳106构造成使得机壳的宽度107平行于转子的轴线。机壳的宽度107构造成使得转子101和定子102的宽度被围在机壳106内。例如,机壳106通常为圆柱形,或者是环绕定子102的外表面的圆柱形元件,使得它适合定子102(以及定子102内的转子101)的形状。机壳106包括用于机壳每一侧的盖110。盖通常为圆形并延伸至转子101的表面上。盖110用于接合机壳106的表面,从而封闭由机壳形成的大体为圆柱形的结构体,使得机壳106在使用时是密封的。
[0048]
在机壳106的组装期间,可使用真空泵和真空密封件封闭内部使其与外部分离开来。因此,密封机壳106在使用中被抽空,使得转子101在真空下可运行。如此,转子101周围的空间被抽空,使得转子101在减小的摩擦力下自由旋转。一旦把系统安装在现场,在其整个使用期限内可能会出现失去真空,因此“在现场”(即使用系统的位置)可能会存在备用真空泵,其连接到系统以补偿任何真空损失或真空质量下降。真空使作用在转子101上的摩擦力最小化,并减少了转子101和定子102之间的粘性阻力。
[0049]
旋转过程中的风阻损失会与立方轨迹上的转子的旋转速度成正比——因此,可以使用适当的真空来保持效率并存储可行的能量。
[0050]
机壳106包括用于支撑转子101(图1中未示出)的轴承。轴承安装在每个盖110的中心,使得当每个盖110被安装在机壳106的其余部分时,转子101的轴杆103的端部与轴承定位并接合。轴承的设置是为了最大程度地减少旋转过程中的摩擦。转子101仅由轴承支撑,并因此可以以非常低的摩擦损失进行旋转,尤其是与抽真空的内部区域结合时。在盖110和轴杆103之间可设置有可压缩式部件(未示出),例如o形环或可压缩垫圈。一旦系统在真空下密封,盖110推动并挤压o形环。通过诸如螺钉等紧固装置,盖110固定至壳体106。使用多个螺钉并通过拧紧引线来固定盖110。前述轴承可以是旋转元件轴承,特别地它可以是深槽径向轴承。
[0051]
为了进行必要的维修或保养,可以不时拆下盖106。在这种情况下,可更换o形圈,并在再次开始运行之前重新引入真空(例如使用真空备用泵)。
[0052]
由于飞轮受撑于竖直平面中,因此转子的轴线在使用中通常是水平的。这可以会随着时间的推移降低轴承上的应力,从而可能延长轴承的使用期限。在某些已知的系统中,飞轮反过来被设计成具有垂直的轴线,且其受撑于角接触轴承或在某些情况下为磁性轴承以进行旋转。磁性轴承对于许多应用可能价格昂贵,因此通常使用角接触轴承。然而,在本发明的系统中,由于飞轮设置为具有水平的轴线,从而允许使用深槽径向轴承。
[0053]
图2a示出了示例性的深槽径向轴承210和示例性的角接触轴承220的截面图。角接
触轴承220包括一个或多个滚动元件222,其由接触表面224设置成相对于相对于被轴承支撑的轴类件的轴线呈倾斜角度旋转,从而为轴类件提供轴向支撑,以能在垂直情况下使用这些轴承。因为滚动元件212和接触表面214设置为仅支撑径向负载,而由于深槽径向轴承210不提供轴向支撑,因此它们不能在垂直情况下使用。
[0054]
如本领域技术人员将理解的,由于接触表面224的形状导致滚动元件222的滑率增加,使得深槽径向轴承210的摩擦系数比水平结构中使用的角接触轴承220的摩擦系数要小(大约小25%)。轴承220的保持架的设计以及角接触轴承220将负载分散至所有滚动元件222这一性质(而非深槽径向轴承210中现有滚动元件212的大约三分之一)可能是深槽径向轴承210相对于角接触轴承220摩擦系数较低的另一原因。
[0055]
因此,在本发明的系统中使用深槽径向轴承210可以延长轴承的使用期限,从而减少定期维护和/或更换轴承的必要;如此,可以减少系统的停机时间——通常必须将系统完全停机以进行维护,这是可以理解的,此时需要将能量存储在其他位置。因此,使系统的停机时间最小化是重要的设计考虑因素。
[0056]
图2b示出了组装在带盖110的系统100的适当位置处的轴承。特别地,图1所示的盖110与轴杆103(也如图1所示)组装在一起。深槽轴承210(如图2a所示)设置在轴杆103(具体地在轴杆的细端部)与从盖110延伸出的凸缘112。在其他实施例中,轴承210可以是如图2a所示的一样为角接触轴承220,或者它们可以是磁性轴承。
[0057]
轴杆103通过销231固定在盖110的适当位置中,以便相对于机壳106和系统100的其余部分固定转子101。如上所述,设置轴承210以利于轴杆103的旋转,从而使转子101相对于盖110旋转。
[0058]
再次参照图1,机壳106还包括散热装置108。例如,散热装置108可以包括散热片,如图1所示,该散热片用于增加增加机壳106的有效表面积以助于电动机的散热。在一些实施例中,可以设置诸如散热器或热管之类的其他散热装置108。
[0059]
系统100包括设置在机壳下方用于支撑的底座。机壳完全由底座支撑,这有助于最大程度地减小系统的“占地面积”。底座109的形状通常为三棱柱体(的一部分),圆柱形机壳的一部分凹入其中(从而切去了底座的三棱柱体形状的顶部)。机壳的凹入底座的部分降低了系统的重心。底座109不超出机壳的深度107(即平行于轴类件103的尺寸),从而最小化系统的“占地面积”。然而,底座109的底面比与机壳106相交的部分宽,使得三角形表面延伸于底座109底面的边缘和底座109与机壳106相接部分的边缘之间。仅一部分机壳106位于底座109上——位于底座109上的部分可由盖110的弦杆(其延伸于机壳106的与底座109相接的边缘上的各点之间)界定。弦杆通常长于盖110的半径,但短于盖110的直径。一般选择底座109的尺寸,以尽量减少系统100的占地面积和材料使用,同时确保提供能够支持正在使用的电动机(特别是减轻倾倒)高效工作的底座109。
[0060]
底座109构造成在垂直方向上支撑机壳106,从而支撑电动机的转子101和定子102。因此,当底座是卧式的时,例如底座放置在水平表面上,底座109将转子的轴线支撑在大致为水平的轴线上。系统100可以设置成可独立使用,但优选地被“埋入”另一支撑体以以增加系统的稳定性。例如,系统可以安装在混凝土平台上和/或可以用螺栓固定在地基上。在特定实施例中,通过混凝土螺栓把系统100螺栓安装在钢筋混凝土地板上,以提供稳定性并减轻任何倾覆问题。
[0061]
在一些实施例中,底座109可以耦接至机壳106,例如它可以由与机壳106相同的挤压件制成。在其他实施例中,底座是安装有机壳的单独的组件。
[0062]
系统100还包括用于监测轴杆103的角度位置的编码器(未示出),其中,编码器设置成与控制电路通信。在使用16/14级结构(或具有高磁极数的另一种结构)的情况下,必须以相当高精度的方式得知轴类件的角度位置,以便进行控制(因为各绕组的位置相对较近)。这排除了使用低成本的光学旋转编码器;而是必须使用定制尺寸的编码器,如磁性增量式编码器。例如,可以使用定制的磁性增量式编码器(例如由pepperl + fuchs制造的编码器)来实现小于0.01
°
的角分辨率。编码器直接连接到轴杆103,并用于将角度位置的测量结果传输至控制器(例如数字信号处理器(dsp)控制器),该控制器对从编码器接收的数据执行信号处理。然后,控制器将转子103的位置通知主控制器或主控制器,例如现场可编程门阵列(fpga)控制器。
[0063]
图3显示了组装好的储能系统100。组装好的系统的总高度(含散热片108)约为1105 mm,总长度约1115mm,总宽度约430 mm。机壳106的总直径约为980 mm。应当理解,系统100的尺寸主要由转子101的尺寸决定,该尺寸的选择能平衡能量密度与在高速下承受机械应力的能力(连同作为srm的一部分进行控制的能力)。通常,系统的机械和热学方面而非磁限制决定了系统的尺寸。系统的设置一般使得其尺寸(固然为转子的尺寸)尽可能小,从而提供具有小外形因数和占地面积的系统,以提高其作为大批系统100的一部分的可用性。
[0064]
在使用中,转子可以旋转并充当飞轮。在制造过程中(或维修后),抽空机壳会导致与飞轮旋转相对的摩擦非常小。如果将电流连续地提供给成对的绕组,则随着转子旋转,会向转子施加转矩,使其旋转更快。可以理解的是,向绕组提供的电流的相位必须与转子的旋转同步,以便每个磁极在接近绕组时都被吸引到绕组上。因此,输入的电力被转换成旋转转子的动能。
[0065]
图4a示出了一种实施例的系统100的转子400。转子400是实心体,其包括从大致呈圆柱形的本体403突出的多个区域405,其中突出区域405形成转子磁极。例如,图4显示了14个转子磁极(适用于具有16/14级结构的srm)。每个突出区域对应于大约13
°
的转子。转子400还包括位于多个突出区域405之间的多个凹口412。转子400还包括位于中心的孔411,其构造成可容纳轴杆103。转子具有约为400 毫米的半径(包括突出区域405)和约165毫米的宽度。孔411的直径约为80mm。
[0066]
转子400由17
‑
7型沉淀硬化钢(其因自身强度和硬度而被选中以允许实现高速运行)的多个叠片形成。该多个叠片组成的叠片层可作为涡电流的屏障,这意味着涡流被限制在每个叠片厚度内的小回路。这可以大大降低任何涡电流的大小,并因此可以减小电力损耗。
[0067]
图4b示出了单个叠片450的结构。单个叠片的厚度小于1mm,优选为约0.4mm厚。在大规模飞轮储能上采用使用了大于该厚度的叠片的srm是不可行的,因为会有不期望的电磁性能(即涡电流将变得不可忽略)图5a示出了一种实施例中的系统的定子500。定子500包括多个突起505,每个突起周围有绕组;当绕组通电时,形成定子磁极。定子500构造成环绕转子以允许转子的旋转,同时确保定子磁极接近转子磁极,从而允许最大的磁相互作用并因此获得最大的转矩。定子500具有约470.6mm的外半径和约402.6mm的内半径(即到定子500的内表面的半径,包括突
起505)。每个突起505长约81.2mm。定子500的宽度约为165 mm,该宽度与转子400的宽度相同。
[0068]
像转子400一样,定子500由多个叠片构成以便减小涡电流。图5b示出了单个叠片550的结构。每个叠片的厚度小于1mm,更具体地说,厚度约为0.35mm厚。该多个叠片由马氏体时效钢(特别是m270
‑
35a)制成,并带有电工钢涂层,例如c3、c5或c6 astm国际标准涂层。
[0069]
定子500还包括至少一个切口507,位于外表面(即朝外的圆周)上。这些切口的设置能让定子锁定至图1所示的机壳106。在图5b中,定子500中有四个切口。
[0070]
图6a示出了已发生故障的转子601的一部分的仿真结果。图中示出了转子101的实心钢片601已发生故障,并且它以6000 rpm的初始角速度与定子102碰撞,导致了定子102和机壳106损坏和变形。例如,图示的区域605是因转子碰撞引起的塑性应变而变形。这可能会导致转子101在其圆周上的其他位置接触定子102。定子102也已经与机壳106在例如位置603处分离。这种损坏使系统非常不安全,比如大块材料可能以高速喷射。
[0071]
图6b示出了由厚度为0.35mm的单个叠片制成的转子601在5000rpm的初始角速度下已经故障的仿真结果。穿过转子601的广泛屈曲和随后的破裂似乎对定子602或底座603的完整性几乎没有影响。因此,一部分叠片的故障似乎不会影响装置的安全性,但是,叠片的故障可能会使系统失衡。
[0072]
因此,除了减少电损耗外,叠片的使用还可以通过改良部件故障时的塑性变形以及降低材料的大部件被同时弹出的可能性来提高安全性。叠片通过塑性变形机制变形和损失能量的能力意味着系统中的动能会在发生故障时迅速降低到更安全的水平。此外,当使用叠片时,轧制钢制底盘的完整性不太可能受到转子破裂的影响。图6a中的仿真显示了叠层结构带来的安全性方面的改良——一体式转子会发生较小程度的塑性变形,因此更有可能使机壳603破裂。
[0073]
图7示出了安装(或“装配”)有一大批储能系统701的示例性装置700。每个储能系统701可以是图1的储能系统100。储能系统701构造成形成模块化装置的一个单元。
[0074]
每个储能系统701设置成使得电动机的轴线水平对齐。系统701的小尺寸允许更有效地布置储能系统701组成的装置700。出于安全原因,多个储能系统701被隔开一定距离。装置700由20个系统组成。当然,应当理解,可以为不同的目的提供各种不同尺寸的装置。
[0075]
装置700包括四个电力电子部件702。下面将参照图8更详细地描述电力电子部件702的功能。
[0076]
图8示出了用于1mw设备(即能够存储1mw的装置)的多个飞轮系统801组成的装置800的示例性系统图。每个飞轮系统801可以与图1所示的系统100以及图7中的系统701相同。装置800包括16个飞轮系统801,它们被分成两个子装置810,每个子装置具有8个飞轮系统801。每个系统801以62.5 kw的功率运行,为装置800提供总共1 mw的电力。每个系统801存储的最大能量为7.5 kwh;因此,装置800存储的最大能量为120 kwh。
[0077]
每个子装置810连接到电力电子部件802。每个电力电子部件802包括用于特定子装置810内的每个系统801的电力电子设备。电力电子部件802包括八个机架,其中每个机架分别为子装置810中的每个飞轮系统801设置电力电子设备。
[0078]
飞轮系统801经由公共dc总线804连接到电力电子部件802。对于1mw装置,总线电压通常在715v和800v之间。每个电力电子部件802都通过总线804连接到电源转换器805,特
别是有源前端(afe)。电源转换器805能够起逆变器和整流器的作用,以便将来自飞轮储能系统801的dc电流转换为用于例如电网的ac电流,反之亦然。
[0079]
电源转换器805直接连接到变压器806,该变压器806将从系统输出的电流转换为向前传输,并将来自电网的能量转换为适合与飞轮系统801一起使用的(ac)形式。
[0080]
每个电力电子部件802包括在子装置810中的飞轮系统801与主控制器807之间接收通信数据的控制器803(例如pcs“片上plc”(rtm)控制器),该主控制器接收来自装置800(并且因此来自装置800中的所有飞轮系统801)中的所有电力电子部件802的数据。例如,控制器803可以将编码器数据传送回主控制器807,或者可以将控制命令从主控制器807传输到各个飞轮系统801。主控制器807与过程控制系统808通信,该过程控制系统808可以使用监督控制和数据采集(scada)架构。过程控制系统808经由指令接口809接收操作员输入,发电厂操作员或电网操作员可以提供这种输入。所描述的控制系统能让各种飞轮系统的操作得以受控,以例如在能量输入和输出之间改变模式,又如改变特定的设定点,再如启动或关闭系统。scada架构的使用允许同时控制多个装置800。
[0081]
替代方案和扩展方案尽管以上主要是针对负载平衡应用来描述本发明的系统,但是应当理解,所描述的系统也可以以各种其他配置来提供。例如,该系统可用于电压控制、负载时移、峰值避免、大功率电动汽车充电支持(以允许延迟网络基础设施升级)、能源套利、电化学存储支持(以延长此类系统的寿命)以及微电网能源管理和平衡。在某些应用中,系统的相对较小的尺寸和便携性可用于提供灵活的负载平衡和/或能量存储,例如,可设置车载系统,以便在卡车可到达的任何位置提供临时能量存储。
[0082]
可选地,系统的设置应能尽量减少地球自转对系统的影响,地球自转会导致力施加到飞轮上。为了保持角动量,飞轮将试图抵抗这些力,这可能会导致负载增加,进而导致轴承磨损。通过调整系统方向可以使飞轮的轴线与地球的旋转方向平行(即从西向东),从而减小自转带来的影响。
[0083]
在替代方案中,可以(例如以“堆栈”的方式)组合多个系统,以形成包括多个飞轮的另一系统。在这种情况下,某些组件(例如电力电子设备)可以跨多个系统共享。可选地,这样的多个系统可以集成在单个外壳内。在一个示例中,将例如四个系统的装置组合在一起成为一个单元,该单元内的每个飞轮系统都非常靠近地面。例如一种结构涉及一个接一个地布置每个系统,使得轴杆基本上对齐。该单元还可包括滑动机构,以能让系统伸出以例如进行维护。该示例对于空间限制非常严格的场景(例如建筑物内)可能特别有用。
[0084]
在替代方案中,机壳可以包括限定了用于冷却剂的流体流动路径的至少一个冷却剂通道。冷却剂可以例如是液体,其通过管道系统再循环并通过热交换器冷却。在其他示例中,冷却剂通过散热器与周围的空气进行热交换;或者冷却剂可以是空气;或者它可以是在流过冷却剂通道期间蒸发的再循环制冷剂流体。
[0085]
可选地,机壳可涂覆有高发射率的涂料以提高系统的散热。冷却是这种真空装置的一个重要问题,在表面涂上高发射率涂料有助于缓解这一问题。这将有助于通过使用中的辐射降低系统温度,并通过防止过热和组件故障来提高安全性。通过辐射冷却,也可能不需要主动冷却系统。
[0086]
还应理解的是,系统中所描述的尺寸和材料是示例性的,可以使用各种其他材料
和尺寸来实现本发明系统的至少一些优点。类似地,应理解的是,可以将适当适配版本的系统配置为与飞轮一起在垂直轴上运行,使用除所描述的轴承以外的轴承(特别是磁性轴承)和/或使用不同的srm结构(特别是可以使用12/10级结构(使用6相))。通常,转子磁极数为n,定子磁极数为m,m=n+2。优选地,n>6,更优选n>8,仍更优选地n>10,再更优选地n>12。
[0087]
尽管通常以在多个飞轮系统801之间共享电力电子设备和控制组件的方式描述了装置800,但是应当理解,在替代方案中,可针对单个系统提供此类部件,或在多于或少于所描述的数量的飞轮系统801之间共享这样的组件。
[0088]
应当理解,上面仅通过示例的方式描述了本发明,可以在本发明的范围内进行细节的修改。
[0089]
说明书中以及(在适当情况下)权利要求和附图中公开的每个特征可以独立地或以任何适当的组合来提供。
[0090]
出现在权利要求中的附图标记仅是示例性的,并且对权利要求的范围没有限制作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1