定子、具有定子的电机和车辆以及制造定子的方法与流程
1.本发明涉及定子和具有所述定子的电机。更具体地,本发明涉及适于在开关磁阻电机中使用的定子。
背景技术:
2.下文对本发明背景的讨论仅旨在促进对本发明的理解。应当理解,该讨论不是确认或承认所提及的任何材料截至本发明的优先权日、在任何司法管辖权中为已公开、已知或为本领域技术人员公知常识的一部分。
3.开关磁阻电机(srm)是一种基于磁阻转矩原理工作的步进电机。srm可以在燃料泵操作中使用、也可以在以下产品中使用,所述产品包括真空鼓风机、电动车辆(例如,e
‑2‑
轮车(e
‑2‑
wheelers)、e
‑3‑
轮车(e
‑3‑
wheelers))、混合动力车辆、电风扇、洗衣机、电动助力转向装置、在过程控制行业中使用的电动驱动装置等。开关磁阻电机多样化的应用部分地由于其简单的设计和结构的坚固性,并且可靠性高、范围广泛、成本低、响应快速、容错性和转矩惯性比高等等。电机的主要限制特征是运行时产生的高转矩波动和声学噪声。
4.srm电机的声学噪声在7500转每分钟(rpm)以上的速度下比现有的常规电机高约40%。srm的定子绕组中的电流与局部磁场相互作用以在定子绕组上产生/感应力。这种力可能会引起绕组振动,从而导致声学噪声的发出。绕组振动还会激发定子振动,从而增加声学噪声。可以通过多种手段控制声学噪声。一种这样的手段是使用开关来控制电流路径。另一种手段是使用模糊逻辑控制来优化srm的控制。声学噪声也可能是由于磁通反转和磁通脉动。
5.电机中的转矩波动是其一转期间最小和最大转矩之间的差值。这由许多因素引起,例如,齿槽转矩、磁动势(mmf)和气隙通量谐波之间的相互作用等。转矩波动的主要原因是磁通脉动。磁通脉动无法消除,但可以通过在定子中引入永磁体以支持转矩产生和起动期间的初始磁通来减少。
6.基本上,转矩是定子磁通乘以定子绕组/线圈中的电流的函数。因此,定子磁通和电流二者都有助于转矩的产生。
7.永磁体(pm)用于减少磁通脉动,但pm的使用可能会在电机中引入齿槽效应或“无电流”转矩,由此导致更高的起动电流。当转子不旋转时,由于与转子的磁通链会产生齿槽转矩。外部电阻组的电流、安装在定子上的辅助绕组、以及在转子中引入铜条/阻尼绕组已被用于减小由于使用pm造成的初始无电流转矩。事实证明,为此目的而普遍使用的稀土磁体是相当昂贵的。由于过热、大电枢电流或srm长时间过载,还存在磁极退磁的风险。
8.而且,由于srm仅由磁阻转矩驱动,因此需要用于定子绕组的附加励磁电流来励磁srm。因此,srm的效率不如在电动车辆中使用的永磁同步电机的效率。由于转矩波动,与无刷dc(bldc)电机相比,srm通常在较低速度下具有较低效率,而与磁体辅助电机相比,srm的功率密度较低。bldc电机在其转子中有永磁体且在其定子中有电磁体。
9.鉴于上文,需要一种改进的srm,其减轻上述缺点中的至少一个。
技术实现要素:
10.根据本公开的一方面,提供了一种定子,其包括两对或更多对径向相对定子磁极、和两个或更多个定子绕组。每个定子绕组围绕相应一对径向相对定子磁极缠绕。绕组可以被激励以在所述一对径向相对定子磁极中的一个定子磁极内沿其径向轴线产生磁通。磁通从定子磁极的正面发出。定子还包括设置在定子磁极中的永磁体,用于使磁通转向以至少基本上从定子磁极的侧表面发出。
11.在一些实施方式中,永磁体偏离于径向轴线设置在定子磁极中。并且永磁体具有面向径向轴线的n极和与定子磁极的径向轴线相交的磁性方向。在一些实施方式中,永磁体具有接近垂直或垂直于径向轴线的磁性方向。
12.在一些实施方式中,永磁体是设置在定子磁极中的唯一磁体。
13.在一些实施方式中,一对径向相对定子磁极中的另一定子磁极没有任何永磁体。
14.在一些实施方式中,两对或更多对径向相对定子磁极中的在其中设置有永磁体的定子磁极彼此相邻。
15.在一些实施方式中,永磁体是非稀土铁氧体永磁体。
16.根据本公开的另一方面,提供了一种包括上述定子的电机。
17.根据本公开的又一方面,提供了一种包括上述电机的车辆。这种车辆包括但不限于e
‑
2轮车、e
‑
3轮车和混合动力车辆。
18.根据本公开的又一方面,提供了一种用于制造定子的方法。定子包括至少两对径向相对定子磁极。所述方法包括围绕至少两对径向相对定子磁极中的每对布置绕组。绕组是可激励的,以在径向相对定子磁极对中的定子磁极内沿定子磁极的径向轴线产生磁通,以从定子磁极的正面发出。所述方法还包括在定子磁极中插入永磁体,用于使磁通转向以至少基本上从定子磁极的侧表面发出。
19.在一些实施方式中,插入永磁体包括将永磁体插入定子磁极中,而使所述一对径向相对定子磁极中的另一定子磁极没有任何磁体。
20.在一些实施方式中,所述至少两对径向相对定子磁极中的在其中插入有永磁体的定子磁极彼此相邻。
附图说明
21.从以下结合附图的详细描述中,本发明的其他方面和优点将变得显而易见,所述附图以示例的方式示出了本发明的原理。
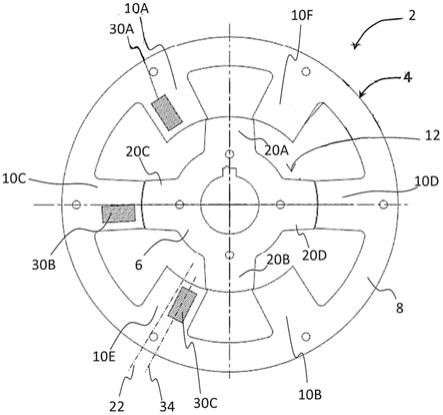
22.图1是根据本发明的实施方式的三相开关磁阻电机(srm)的剖视图,其中,srm包括低成本的非稀土铁氧体永磁体,其设置在三相srm的选定的定子磁极中。
23.图2是示出图1中srm的定子尺寸(以毫米为单位)的剖视图。
24.图3是示出图1中srm的转子尺寸(以毫米为单位)的剖视图。
25.图4是示出图1和2中的定子被封闭在电机轭中的剖视图。
26.图5是图4中的定子和电机轭的剖视图,进一步示出了围绕定子的每个定子磁极的定子绕组。
27.图6是图1中的srm的剖视图,示出了在srm的最小磁阻位置中,与一对径向相对定子磁极对准的一对径向相反转子磁极,以及用于沿逆时针方向旋转转子的绕组中的电流方
向。
28.图7是类似于图6的剖视图,示出了用于沿顺时针方向旋转转子的绕组中的电流方向。
29.图8a是示出srm的定子磁极和转子磁极之间的磁通脉动的示意图,其中,在srm的定子磁极中没有任何永磁体。
30.图8b是示出图1中的srm的定子磁极和转子磁极之间的磁通脉动的示意图,其中,定子磁极具有设置在其中的永磁体以便操纵在定子磁极中产生的磁通的方向。
31.图9是包括图1中的srm的电机组件的剖视图。
32.图10是根据本发明的其他实施方式的定子磁极的剖视图,所述定子磁极具有位于其中的不同位置的不同形状的永磁体。
具体实施方式
33.应当理解,本发明不限于特别示例的系统和参数,当然它们可以变化。还应理解,本文中使用的术语仅用于描述本发明的特定实施方式的目的,并不旨在以任何方式限制本发明的范围。
34.除非另有明确说明,否则术语“一实施方式”、“实施方式”、“多个实施方式”、“所述实施方式”、“所述多个实施方式”、“一个或多个实施方式”、“一些实施方式”、以及“一个实施方式”指“本发明(一个或多个)的一个或多个(但不是全部)实施方式”。
35.除非另有明确说明,否则术语“包括”、“包含”、“具有”及其变体指“包括但不限于”。除非另有明确规定,否则列举的项目列表并不意味着任何或所有项目是相互排斥的。除非另有明确说明,否则术语“一”、“一个”和“所述”指“一个或多个”。
36.对具有彼此联系的若干部件的实施方式的描述并不暗示需要所有这些部件。相反,描述了多种可选部件以说明本发明的多种可能的实施方式。
37.术语“制动转矩”、“磁转矩”和“齿槽转矩”可以互换地用于描述由于定子磁极的永磁体和转子之间的相互作用而产生的无电流转矩。
38.术语“剩余磁通密度或剩磁”指当外场从饱和磁化强度的高值返回到零或接近零时剩余的磁通密度值。剩磁也称为残余磁化强度。
39.如附图中所示,出于说明的目的,本发明可以体现在具有减小的转矩波动和声学噪声的电机的定子中。参照图1至图7,体现本发明的定子通常包括这样的定子,所述定子包括两对或更多对径向相对定子磁极和两个或更多个定子绕组。每个定子绕组围绕相应一对径向相对定子磁极缠绕。绕组可以被激励,以在所述一对径向相对定子磁极中的一个定子磁极内沿其径向轴线产生磁通。磁通(趋向于)从定子磁极的正面发出。定子还包括设置在定子磁极中的永磁体,用于使磁通转向以至少基本上从定子磁极的侧表面发出。本发明还可以在具有定子的电机中实施。
40.具体地,图1
‑
7示出了包括定子4和转子6的开关磁阻电机(srm)2。定子4包括圆柱形定子轭8和从定子轭8向内突出的、三对径向相对定子磁极10a
‑
10f。定子4在其中包括被定子磁极10a
‑
10f包围的开口12。定子4还包括三个定子绕组14a
‑
14c(图5
‑
7)。绕组14a围绕第一对定子磁极10a、10b缠绕以限定srm 2的第一相a。绕组14b围绕第二对定子磁极10c、10d缠绕以限定srm 2的第二相b。绕组14c围绕第三对定子磁极10e、10f缠绕以限定srm 2的
第三相c。在定子磁极对10a
‑
10f的绕组14a
‑
14c中,围绕每对定子磁极10a
‑
10f中的定子磁极10a、10b、10c的线圈16与围绕该对定子磁极10a
‑
10f中的另一定子磁极10d、10e、10f的线圈串联连接。以这种方式,总共有六个从srm 2引出的导线端部18连接到电机驱动装置(未示出)的输出端,以通过其供应电流。
41.转子6被接收在定子4的开口12中,以在其中可旋转。转子6包括两对径向相反转子磁极20a
‑
20d。转子6为层合结构,没有任何永磁体。在使用中,每个绕组14a
‑
14c依次借助于从其经过的电流而被激励。当绕组14a
‑
14c被激励时,在相应的定子磁极对10a
‑
10f中产生磁通以励磁定子磁极对10a
‑
10f。以这种方式,沿着初始相位定子磁极10a
‑
10c的径向轴线22产生磁通21(图8a),以从定子磁极10a
‑
10c的正面24(图8a)发出。在这种磁路中,在定子磁极10a
‑
10f被励磁的情况下,推动转子6到达最小磁阻的位置。图1示出了与一对励磁定子磁极10c、10d对准的一对转子磁极20c、20d。在该位置中,另一对转子磁极20a、20b与其他定子磁极对10a、10b、10e、10f未对准。
42.为了减少转矩波动和声学噪声并提高srm 2的效率,定子4还包括三个永磁体(pm)30a
‑
30c。pm 30a
‑
30c被设置在初始相位定子磁极10a
‑
10c中,用于将磁通21转向以至少基本上从定子磁极10a
‑
10c的侧表面32(图8b)发出。优选地,磁通21的至少大约70%从定子磁极10a
‑
10c的侧表面32发出。在一些实施方式中,高达100%的磁通21从定子磁极10a
‑
10c的侧表面32发出。
43.图2和3分别示出了定子4和转子6的以毫米(mm)为单位的示例性尺寸。图2还示出了pm 30a
‑
30c的示例性横截面尺寸。每个pm 30a
‑
30c都有矩形横截面,测量为12.1mm
×
6.1mm。然而,pm 30a
‑
30c的宽度或厚度可以在大约5
‑
7mm的范围内。
44.根据电机电流和温升,计算永磁体体积。在定子磁极10a、10c、10e中设置矩形槽(未示出),该矩形槽延伸穿过每个定子磁极10a
‑
10c(图9)的整个长度,该矩形槽的体积对应于计算出的磁体体积。并且相应形状的细长pm 30a
‑
30c被插入到定子磁极10a、10c、10e的矩形槽中。如本领域技术人员所知,也可以使用其他形状的pm,包括但不限于正方形、圆形、椭圆形、梯形、弓形、半圆形等,如图10所示。在该实施方式中,每个pm 30a
‑
30c是相应定子磁极10a、10c、10e中的唯一磁体30a
‑
30c。换言之,每个pm 30a
‑
30c是存在于相应定子磁极10a、10c、10e中的一个且唯一的磁体30a
‑
30c。每个pm 30a
‑
30c偏移于径向轴线22被设置在相应的定子磁极10a、10c、10e中。更具体地,pm 30a
‑
30c具有与定子磁极10a、10c、10e的径向轴线22间隔开的中间轴线34(图8a、8b)。pm 30a
‑
30c在槽中定向,使得pm 30a
‑
30c的n极面向内、即面向径向轴线22,以具有与定子磁极10a、10c、10e的径向轴线22相交的磁性方向(dom)40。优选地,pm 30a
‑
30c的dom 40接近垂直(例如,80
‑
89度)或垂直于定子磁极10a、10c、10e的径向轴线22。
45.如图1所示,径向相对定子磁极对10a
‑
10f中的另一定子磁极10b、10d、10f优选没有任何pm。因此,每对定子磁极10a
‑
10f中的仅一个定子磁极10a、10c、10e在其中具有pm 30a
‑
30c。对于第一对定子磁极10a、10b,仅定子磁极10a在其中具有pm 30a。对于第二对定子磁极10c、10d,仅定子磁极10c在其中具有pm 30b。并且对于第三对定子磁极10e、10f,仅定子磁极10e具有pm 30c。在其中具有pm 30a
‑
30c的定子磁极10a、10c、10e彼此相邻。换句话说,三个连续的定子磁极10a、10c、10e中的每个均在其中具有pm 30a
‑
30c。因此,没有任何pm的定子磁极10b、10d、10f也彼此相邻,如图1所示。
46.在该实施方式中,每个pm 30a
‑
30c包括非稀土铁氧体pm,但也可以使用其他类型的永磁体。每个pm 30a
‑
30c优选地具有在大约0.31t和大约0.35t之间的范围内的剩余磁通密度(br)并且传递大约0.29t的磁通密度。如上所述,pm 30a
‑
30c的形状可以是任何几何形状或任何非常规形状。每个pm 30a
‑
30c可以是市场上可获得的相对低成本的磁体。
47.每个pm 30a
‑
30c的等级范围可以从具有0.2t磁通密度的y8t等级到具有0.44t磁通密度的y40等级。pm 30a
‑
30c的选择可基于电机功率容量和所需的转矩波动减少量。在一些实施方式中,srm 2可具有在0.5kw和100kw之间的额定值。对于0.5kw的较低电机额定值,可以使用y8t等级的pm,以增加磁通链并减少转矩波动。如果将y40等级的pm用于0.5kw额定值的电机,更高的磁通密度可能会引起需要额外的磁阻转矩来克服的制动转矩。要选择所需的剩余磁通密度,经验法则是达到定子磁极10a
‑
10f峰值磁通密度的20%。例如,如果定子磁极具有1.5t的峰值磁通密度,则pm的剩余或残余磁通密度可能定子磁通密度的约20%、即约0.3t。
48.诸如pm的尺寸、形状和位置的参数将确定pm的磁性方向(dom)。因此,必须适当地选择磁体参数以促进对定子磁极10a、10c、10e中的磁通路径的操纵。后文将描述pm 30a
‑
30c的参数选择的细节。
49.由于在定子磁极10a、10c、10e中存在pm 30a
‑
30c,在定子4中很容易获得0.29t的磁通密度。这在定子4中赋予初始残余磁通。这种残余磁通借助于消除srm 2中的起动问题并减少srm 2操作期间的磁通脉动和转矩波动,而有助于srm 2的起动。此后,转子6的转动引起随着绕组14a
‑
14c被磁激励,绕组14a
‑
14c的电感上升。这消除了磁通脉动的初始浪涌,从而将相位反转期间的波动和磁噪声减少到相当显着的水平。
50.此外,由于将pm 30a
‑
30c布置在定子磁极10a、10c、10d中,由源(未示出)所需的总磁动势(mmf)减少,从而减少了包括电机和驱动装置的系统的功率需求。减少的mmf使得定子和转子层合结构在每个区段处以平均操作磁通密度操作,从而减少srm 2的铁损和铜损。由于mmf由pm 30a
‑
30c提供/增强,每相绕组14a
‑
14c的匝数减少。这导致铜重量、铜损减少并提高效率。
51.在定子磁极10a、10c、10e中引入pm 30a
‑
30c也提高了srm 2的合成转矩/输出转矩。每单位转子体积的转矩(trv)的增加有助于在产生相同的转矩输出的情况下减小srm 2在直径和长度方面的大小。每个定子绕组14a
‑
14c优选是22标准线规(swg)、即每股线丝约0.711的铜线,具有4股线丝且每个绕组少于20匝。为了在没有任何pm的srm中实现相同的转矩能力,线丝大小必须为21.5swg,具有4股线丝且每个绕组25匝。
52.饱和的转矩性能由下式给出:
[0053][0054][0055][0056]
其中,n是每个磁极的绕组的匝数,
[0057]
是没有任何pm的srm中的绕组的磁通,
[0058]
是上述永磁体辅助型srm 2中的绕组14a
‑
14c的磁通,以及
[0059]
是上述永磁体辅助型srm 2中pm 30a
‑
30c的磁通。
[0060]
如上所述,包含pm 30a
‑
30c在srm 2中引入了制动转矩或齿槽转矩,从而在srm 2起动期间需要更高的起动电流。该制动转矩减小了平均输出转矩。
[0061]
每个pm 30a
‑
30c可定位或布置在距相应定子磁极10a、10c、10e的正面24约2.5mm的距离处,以避免在矩形槽处的磁饱和和退磁,并提供机械支撑。它减轻、最小化或消除磁通反转,从而减轻转矩波动。但这会导致更高的制动转矩。为了克服制动转矩,发现pm 30a
‑
30c的位置和pm 30a
‑
30c的形状起着至关重要的作用。当pm 30a
‑
30c如上所述远离定子磁极10a、10c、10e的正面24布置时,制动转矩减小。
[0062]
在本发明中,pm 30a
‑
30c可以是任何形状并且磁体的位置可以来自定子磁极的初始相位或结束相位、竖直朝向定子磁极的右侧、竖直朝向定子磁极的左侧、水平朝向定子磁极的左侧、水平朝向定子磁极的右侧、在定子磁极的中心、沿定子磁极的长度的中间、朝向定子磁极的正面、远离定子磁极的正面等,如图10所示。
[0063]
如上所述,pm 30a
‑
30c的位置和形状决定了其磁性方向(dom)。在定子磁极10a、10c、10e中引入pm 30a
‑
30c导致定子磁极10a、10c、10e中的磁通路径改变。图8a示出了当转子磁极20a
‑
20d接近定子磁极10a、10c、10e时没有任何pm的定子磁极10a、10c、10e中的磁通路径。可以看出,磁通仍然非常多地从定子磁极10a、10c、10e的正面24发出。图8b示出了引入pm 30a
‑
30c的定子磁极10a、10c、10e中的磁通路径,如上所述,pm 30a
‑
30c的dom 40接近垂直或垂直于定子磁极10a、10c、10e的径向轴线22。当转子磁极20a
‑
20d接近定子磁极10a、10c、10e时,磁通的路径转向以基本上从定子磁极10a、10c、10e的侧表面32发出。从图8a、8b可以明显看出,定子磁极10a、10c、10e中的磁通路径被改变。磁通不会沿转矩方向切割定子和转子齿部。这种通过改变磁性方向(dom)来操纵磁通路径的方法可以减轻磁转矩或制动转矩,而不会影响srm的转矩输出。因此,通过在srm 2中引入pm 30a
‑
30c,可以使用标准控制逻辑来减少转矩波动、并且具有高平均转矩、在高起动转矩下的低起动电流、以及改进的系统效率。
[0064]
接下来借助于图9描述包括srm 2的电机组件50。电机组件包括轴52,轴52插入穿过转子6的中空中心,从而固定地附接至转子。当转子6旋转时,轴52由此旋转。srm 2被容纳在圆柱形电机轭54中。电机轭54的第一端部由前盖56覆盖。电机轭54的第二端部由后盖58覆盖。轴52的端部突出前盖56和后盖58。传感器盘60固定地附接至从后盖58突出的轴52的端部区段。红外线(ir)传感器62在传感器盘60上方被安装到后盖58,用于检测轴52的旋转。冷却风扇64固定到轴52的从后盖58突出的端部。冷却风扇盖66覆盖着后盖58布置,以包封传感器盘60、ir传感器62、以及冷却风扇64。
[0065]
有利地,srm 2具有如上所述在其中引入pm 30a
‑
30c的定子4,能够在某种程度上克服高转矩波动和声学噪声的问题。据观察,srm 2的功率密度和效率有所增加,同时消除了与引入pm 30a
‑
30c相关的问题,如齿槽转矩和电机起动问题。
[0066]
与没有任何pm的srm相比,具有pm 30a
‑
30c的上述srm 2的转矩波动可以减少多达33
‑
40%。并且声学噪声可减少多达28
‑
35%。没有任何pm的srm的效率为79%,而具有pm 30a
‑
30c的上述srm 2的效率范围在82
‑
90%之间。
[0067]
接下来描述制造上述srm 2的方法。该方法包括提供在选定的定子磁极10a、10c、10e中具有槽(未示出)的上述定子4。该方法还包括将pm 30a
‑
30c插入定子磁极10a、10c、10e的每个槽中。该方法还包括围绕相应一对径向相对定子磁极10a
‑
10f布置绕组14a
‑
14c。如上所述,绕组14a
‑
14c是可激励的,以在径向相对定子磁极对10a
‑
10f的定子磁极10a、10c、10e内沿定子磁极10a、10c、10e的径向轴线22产生磁通,以从定子磁极10a、10c、10e的正面22发出。然而,在引入pm 30a
‑
30c的情况下,定子磁极10a、10c、10e中的磁通被每个pm 30a
‑
30c转向,以至少基本上从定子磁极10a、10c、10e的侧表面32发出。优选地,径向相对定子磁极对10a
‑
10f中的另一定子磁极10b、10d、10f没有如上所述的任何磁体。
[0068]
接下来描述对于6/4磁极三相srm 2获得的实验结果。srm 2的规格如下表1所示。srm 2的绕组14a
‑
14c是22swg的铜线丝,并且每个绕组14a
‑
14c有20匝。使用y21h等级的矩形铁氧体永磁体30a
‑
30c,其截面尺寸为长12.1mm且宽6.1mm。每个pm 30a
‑
30c定位在距相应定子磁极10a、10c、10e的极面24有2.5mm的距离处。pm 30a
‑
30c被布置在如在图1中可见的6
‑
磁极定子的三个连续定子磁极10a、10c、10e中,用于三相操作以产生2.9n
‑
m的转矩。
[0069]
每个定子磁极10a、10c、10e具有17.8mm的宽度。pm 30a
‑
30c的宽度为6.1mm,因此宽度为定子磁极10a、10c、10e的宽度的34%。选择这样的比例以避免在达到srm 2的峰值功率负载之前,定子磁极10a、10c、10e就饱和。也可以使用大约30
‑
40%的其他宽度比例。
[0070]
表1.三相600w开关磁阻电机2的规格
[0071]
序号详细说明值单位1电机轴功率830w2额定电压vdc48v3供应电流idc20.5a4电机效率84%5额定速度2700rpm6额定转矩2.94n
‑
m7配置6/4磁极 8相位3 9绝缘级别f级别 10传感器类型ir [0072]
没有任何pm的srm的转矩波动是14%,并且发现如上所述在其中设置pm的srm的转矩波动是9%。结果表明,转矩波动减少了大约36%。
[0073]
具有pm 30a
‑
30c的srm 2的声学噪声为63db,这比在没有任何pm的srm中产生的90db声学噪声低30%。
[0074]
表2示出了与没有任何pm的srm相比,3相600w srm 2中对转矩波动和声学噪声的改进。
[0075] 转矩波动(%)声学噪声(db)没有任何pm的srm14%90srm 2(具有pm)9%63改进百分比35.71%30.00%
[0076]
诸如但不限于lcr表的电子测试设备用于测量在不同转子位置处的绕组电感。这
有助于识别每个微转子步进时的磁通链。
[0077]
首先,通过在定子绕组中注入毫安(ma)范围内的少量电流来测量没有pm的srm的电感。获得对于不同转子位置的电感分布。该电感分布是电机的特征。它直接提供电机在不同转子位置处的磁通链。
[0078]
接下来,对具有pm 30a
‑
30c的srm 2重复相同的步骤。绘制了在不同转子位置处的电感值。在结合pm 30a
‑
30c之后,在srm 2中观察到磁通从0t到0.29t的明显变化。
[0079]
尽管本发明被描述为在上述实施方式中实施,但不应解释为仅限于此。例如,本发明是在开关磁阻电机(srm)的背景下描述的。然而,本发明可用于任何电机,例如bldc电机。
[0080]
作为另一示例,在6/4磁极的开关磁阻电机的背景下描述了本发明。本发明还可用于其他配置的开关磁阻电机,例如但不限于具有两对或更多对径向相对定子磁极的开关磁阻电机。
[0081]
作为又一示例,描述的是单一磁体设置在定子磁极中。设想在定子磁极中可以使用多于一个磁体,以如上所述地使磁通转向。
[0082]
作为又一示例,pm被描述为设置在初始相位定子磁极处。本领域技术人员将认识到,pm也可以设置在结束相位定子磁极处,而使相应的初始相位定子磁极没有任何磁体。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1