电机控制系统和车辆的制作方法
1.本发明涉及车辆技术领域,尤其是涉及一种电机控制系统和包括该电机控制系统的车辆。
背景技术:
2.目前,电动车辆的发展越来越快,纯电动车的动力源基本上都是电机驱动,混动车辆也是存在电机驱动系统。电机驱动的控制在车辆应用领域不仅考虑功能性能,更多的考虑安全性和可靠性,避免非预期的状态出现。在电机控制器设计过程中,一般考虑功能和性能的方案较多,对电机控制器的安全性的设计并不充分。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种电机控制系统,该电机控制系统可以提高电机控制的安全性。
4.本发明另一个目的在于提出一种包括所述电机控制系统的车辆。
5.为了达到上述目的,本发明第一方面实施例的电机控制系统包括:包括主控单元、电源单元和驱动单元,其中,所述主控单元,用于获取电机采样数据和所述驱动单元的供电信号,根据所述采样数据生成电机控制信号,并在根据所述采样数据确定电机驱动异常或者根据所述供电信号确定所述驱动单元供电异常时,输出安全使能信号;所述电源单元,用于为所述主控单元供电并监控所述主控单元状态,在自身异常或所述主控单元异常时,输出安全切断信号;所述驱动单元,用于根据电机控制信号驱动电机,并在接收到所述安全使能信号和所述安全切断信号中的任一信号时均切换至安全路径。
6.根据本发明实施例的电机控制系统,通过主控单元对电机驱动和驱动单元的供电进行监控,以及通过电源单元对主控单元状态进行监控,即设置多种监控机制,以及驱动单元在接收到安全切断信号和安全使能信号任一信号时,都会切换至安全路径,即增加多条安全切断路径,在电机驱动异常时,可以使得电机处于安全状态,从而可以提高电机控制的安全等级。
7.为了达到上述目的,本发明第二方面实施例的车辆,包括电机和所述的电机控制系统,所述电机控制系统用于对所述电机进行驱动控制。
8.根据本发明实施例的车辆,通过采用上面实施例的电机控制系统,可以提高电机控制的安全等级,提高安全性。
9.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
10.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
transistor,绝缘栅双极型晶体管)关断,或者其中的三相桥臂短路处理,从而,可以在驱动异常时,使得电机处于安全状态。
25.根据本发明实施例的电机控制系统1,通过主控单元10对电机驱动和驱动单元30的供电进行监控,以及通过电源单元20对主控单元10状态进行监控,即设置多种监控机制,以及驱动单元30在接收到安全切断信号和安全使能信号任一信号时,都会切换至安全路径,即增加多条安全切断路径,在电机驱动异常时,可以使得电机处于安全状态,从而可以提高电机控制的安全等级。
26.在一些实施例中,采样数据可以包括电机转速和母线电压中的至少一种,主控单元10在电机驱动异常时,根据采样数据控制驱动单元30切换至安全路径;其中,在电机转速与预设转速的差值绝对值小于设定转速差值时,或者,在母线电压与预设电压的差值绝对值小于设定电压差值时,控制驱动单元30的六路驱动功率单元全部关断。
27.或者,在电机转速与预设转速的差值绝对值大于等于设定转速差值时,或者,在母线电压与预设电压的差值绝对值小于等于设定电压差值时,进一步判断是否为驱动单元30的三相上桥臂电路故障,如果是,则控制三相上桥臂电路31短路,如果否,则控制驱动单元的三相下桥臂电路32短路。
28.具体地,驱动单元30可以由主控单元10和电源单元20进行控制。在正常控制状态下,主控单元10使能驱动单元30,驱动单元30接受主控单元10的pwm信号,对功率单元即三相上桥臂电路31和三相下桥臂电路32进行驱动。当主控单元10发现异常后,可以发出dis/en_able信号,将驱动单元30切换至安全路径。此时根据母线电压采样或电机转速判断,是进入六路驱动单元可靠关断igbt还是三相主动短路状态。
29.如图3所示为根据本发明的一个实施例的主控单元控制驱动单元进入安全路径的流程图,具体包括如下步骤s1-s6。
30.s1,发送dis/enable信号,进入故障模式。
31.s2,判断是否满足∣电机转速-预设转速∣<设定转速差值,或者∣母线电压-预设电压∣<设定电压差值。如果是,则进入步骤s3,否则进入步骤s4。
32.s3,控制驱动单元的六路驱动模块关闭处理,发出报警。
33.s4,判断故障信号是否为三相上桥臂电路,如果是,进入步骤s5,否则进入步骤s6。
34.s5,驱动单元的三相下桥臂电路短路,并发出报警。
35.s6,驱动单元的三相上桥臂电路短路,并发出报警。
36.同时,主控单元10对驱动单元30的供电进行监控,主控单元10在驱动单元30供电异常时,控制驱动单元30的六路驱动功率单元全部关断,以使得电机进入安全状态。
37.同时,电源单元20接收主控单元10发送的状态信息例如通过ds_signal信号对主控单元10进行监控,电源单元20在自身异常或主控单元10异常时,控制驱动单元30的六路驱动功率单元全部关断,从而使得电机进入安全状态。
38.因此,本发明实施例的电机控制系统1,通过主控单元10和电源单元20实现多路监控,并且在驱动异常时,使得电机进入安全状态。
39.在本发明实施例中,主控单元10可以采用多芯片处理也可以采用多核处理,实现对信号、控制目标的监控以及各种诊断,提供对电机更加全面可靠的控制。在实施例中,主控单元10包括多个控制子单元,多个控制子单元为多个控制核或者多个处理芯片。
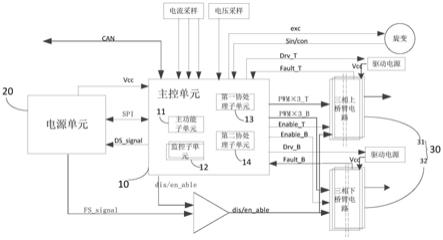
40.进一步地,如图2或图4所示,多个控制子单元至少包括主功能子单元11和监控子单元12,其中,主功能子单元11用于获取电机采样数据例如三相电流ia、ib、ic和电压udc、角度数据,并根据电机采样数据生成电机控制信号,在正常驱动时,驱动单元30可以根据该电机控制信号驱动电机;具体地,主功能子单元11主要完成扭矩控制、故障管理等内容,例如同时将过程数据输入到监控子单元12。监控子单元12用于进行信息诊断并生成诊断信息,并获取主功能子单元11的过程数据,以监控主功能子单元状态,即进行控制流监控。具体地,如图4所示,监控子单元12主要完成扭矩监控、故障诊断、信号诊断、通讯诊断、输出诊断等功能。
41.以主控单元10采用多个控制核为例说明,主控单元10包含至少两个控制核,一个用来负责完成主功能,例如可以称之为主功能核(主功能子单元11),在正常驱动时,主功能核根据采样数据生成电机控制信号,以控制驱动单元30,一个用来负责对控制目标进行监控,例如可以称之为锁步监控核(监控子单元12),该控制核优先具有锁步功能,锁步监控核同时对主功能核中所需的信号进行监控。
42.在实施例中,采样数据可以包括电机角度数据,多个控制子单元还包括第一协处理子单元13,第一协助处理子单元13用于对电机角度数据进行旋变解码,以获得电机控制所需角度,并将电机角度数据传输给主功能子单元11。具体地,如图2或4所示,第一协处理子单元13主要完成旋变解码,将励磁信号exc输出至旋变传感器,然后将旋变传感器的sin/cos信号进行解调处理,获得电机控制所需的角度。
43.在实施例中,监控子单元12还用于根据诊断信息、控制使能与否的信息、可使电机处于安全状态的控制信息生成电机安全控制信号;多个控制子单元还包括第二协处理子单元14,第二协处理子单元14用于根据采样数据确定电机驱动状态,并根据主功能子单元11输出的电机控制信号、监控子单元12输出的电机安全控制信号以及电机驱动状态输出最终电机控制信号。
44.进一步地,第二协处理子单元14包括快速保护模块141和控制信号处理模块142,快速保护模块141用于根据采样数据确定电机驱动状态,例如根据采样的电流、电压、旋变信号等确定驱动故障时,进行快速关断等处理,以使电机在发生故障时处于安全状态。控制信号处理模块142用于在电机驱动正常时,将主功能子单元11的电机控制信号作为最终电机控制信号,根据主功能子单元11的电机控制信号pwm0控制电机运行,例如输出pwm
×
3_t给到三相上桥臂电路,以及输出pwm
×
3_b给到三相下桥臂电路。或者,在电机驱动异常时,将监控子单元12的电机安全控制信号pwm1作为最终电机控制信号,并进一步地根据采样数据控制驱动单元30切换至安全路径。
45.具体地,如图4所示,第二协处理子单元14主要完成最终电机控制信号例如pwm的处理。主功能子单元11通过输入的电流信号、电压信号和位置信号,通过电机控制算法计算获得正常控制所需要的pwm,例如输出data_pwm0;监控子单元12根据诊断信息、输出的pwm使能与否的信息和可使电机处于安全状态的pwm信息输出pwm1,即在存在故障且使能输出控制信号时,监控子单元12输出安全控制信号,也就是可以使得电机安全运行的data_pwm1信号。快速保护模块141通过采样获得的电流,电压,旋变等故障信息,进行快速关断等处理,以使电机在发生故障时,处于安全状态。控制信号处理模块142综合data_pwm0、data_pwm1和快速保护模块141的处理信息,对最终输出pwm_out波形进行处理,并在故障时根据
母线电压采样或电机转速控制驱动单元30切换至安全路径。
46.如图5所示为根据本发明的一个实施例的控制信号处理模块141进行pwm波形处理过程的流程图,包括以下步骤。
47.s11,接收到data_pwm0、data_pwm1、电流电压快速处理信号。
48.s12,诊断是否有电机驱动异常信号,如果是,进入步骤s14,否则进入步骤s13。
49.s13,pwm_out=data_pwm0,电机正常控制状态。
50.s14,pwm_out=data_pwm1,使电机处于安全状态。
51.s15,判断是否满足∣电机转速-预设转速∣<设定转速差值,或者∣母线电压-预设电压∣<设定电压差值。如果是,则进入步骤s16,否则进入步骤s17。
52.s16,控制驱动单元的六路驱动模块关闭处理,发出报警。
53.s17,判断故障信号是否为三相上桥臂电路,如果是,进入步骤s18,否则进入步骤s19。
54.s18,驱动单元的三相下桥臂电路短路,并发出报警。
55.s19,驱动单元的三相上桥臂电路短路,并发出报警。
56.本发明实施例的电机控制系统1,主控单元10通过采用多个控制核或多处理芯片,通过监控子单元12对主功能子单元11进行监控,以及通过第二协处理子单元14对控制功能进行优化,即优化和集成了控制功能,利于提高安全等级。
57.进一步地,如图2所示,在实施例中,驱动单元30的各路功率单元可以进行独立供电,例如电机控制系统1包括两个驱动电源,两个驱动电源分别为驱动单元30的三相上桥臂电路31和三相下桥臂电路供电32供电vcc;或者,电机控制系统1包括六个驱动电源,六个1驱动电源分别为1驱动单元30的三相上桥臂电路和三相下桥臂电路的六路驱动功率单元供电。从而实现电源的独立供电。
58.概括来说,本发明实施例的电机控制系统1,增加了更完善的诊断机制,通过多层监控处理,同时优化和集成了控制功能,增加了多层对电机控制系统1的动力切断路径,以及采用独立的供电系统、对信号的监控和控制目标的监控,从而保证动力输出的安全性,可以使电控系统更为可靠,可以明显提高电机控制的安全等级,进而保障车辆的安全运行。
59.基于上面实施例的电机控制系统,下面参照附图描述根据本发明第二方面实施例的车辆。
60.图6为根据本发明的一个实施例的车辆的框图,如图6所示,本发明实施例的车辆100包括电机2和上面实施例的电机控制系统1,电机控制系统1对电机2进行控制,以提车辆的安全等级,电机控制系统1的结构和安全设计可以参照上面实施例的说明。
61.根据本发明实施例的车辆100,通过采用上面实施例的电机控制系统1,可以提高电机2控制的安全等级,提高安全性。
62.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
63.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本
发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1