单相马达驱动电路及驱动方法与流程
1.本发明涉及单相马达驱动电路及驱动方法,特别是涉及能够提高效率并降低功耗的单相马达驱动电路及驱动方法。
背景技术:
2.直流马达为工业社会及信息时代不可或缺的动力转换装置,其可将电能转换为动能。常用的马达有直流马达、交流马达、步进马达等,其中,直流马达与交流马达通常被用于不需要精密控制的产品装置上,如电动风扇中叶片的转动便可利用直流马达或交流马达来达成。而近年来,如何设计效能良好的马达,已经成为业界所努力的目标之一。
技术实现要素:
3.本发明所要解决的技术问题在于,针对现有技术的不足提供一种能够提高效率并降低功耗的单相马达驱动电路及驱动方法。
4.为了解决上述的技术问题,本发明所采用的其中一技术方案是提供一种一种单相马达驱动电路,单相马达驱动电路用于驱动一单相马达,单相马达驱动电路包括:一马达驱动器,连接于单相马达且包括多个开关;一霍尔传感器,经配置以感应单相马达的转子的磁场大小,并对应产生一霍尔信号组;一霍尔换相检测电路,经配置以依据霍尔信号组来检测磁场的正负极性,而对应产生用于指示换相点的一霍尔换相信号;一周期记录电路,经配置以记录霍尔换相信号以产生一周期指示信号;一马达电流检测电路,经配置以在单相马达正常运转后,检测所述单相马达经过换相点时的马达电流值;一截止角度调整电路,经配置以依据换相时的马达电流值产生指示一截止调整角度的截止角度调整信号;一角度计算电路,经配置接收周期指示信号及截止角度调整信号,以依据周期指示信号的周期产生一换相信号,以及依据截止调整角度产生一截止信号;以及一控制电路,经配置以对换相信号及截止信号进行处理以产生一控制信号组来控制马达驱动器的多个开关,进而马达驱动器产生一输出信号组来驱动单相马达。
5.优选地,输出信号组包括一第一输出信号及一第二输出信号,且第一输出信号在对应于换相点的一第一切换点处由第一电平切换至第二电平,而第二输出信号提前于第一切换点前的截止调整角度处由第二电平切换为第一电平。
6.优选地,截止角度调整电路进一步经配置以判断单相马达换相时的马达电流值是否为零,若否,则进一步判断马达电流值是大于零或小于零,其中响应于马达电流值大于零,截止角度调整电路经配置以增加截止调整角度,而响应于马达电流值小于零,截止角度调整电路经配置以减少截止调整角度。
7.优选地,角度计算电路进一步接收定义有一提前角度值的一提前角度信号,且经配置以依据提前角度值、截止调整角度及周期指示信号的周期产生换相信号。
8.优选地,马达驱动器包括:一输入端,接收一输入电压;一第一输出端;一第二输出端;一第一开关,耦接于输入端与第一输出端之间;一第二开关,耦接于第一输出端与接地
端之间;一第三开关,耦接于输入端与第二输出端之间;以及一第四开关,耦接于第二输出端与接地端之间,其中控制信号组包括分别用于控制第一开关、第二开关、第三开关及第四开关的一第一控制信号、一第二控制信号、一第三控制信号及一第四控制信号,以使第一输出端及第二输出端分别输出第一输出信号及第二输出信号。
9.为了解决上述的技术问题,本发明所采用的另外一技术方案是提供一种单相马达驱动方法,单相马达驱动方法用于驱动一单相马达,单相马达驱动方法包括:配置包括多个开关的一马达驱动器连接于单相马达;配置一霍尔传感器以感应单相马达的转子的磁场大小,并对应产生一霍尔信号组;配置一霍尔换相检测电路以依据霍尔信号组来检测磁场的正负极性,而对应产生用于指示一换相点的一霍尔换相信号;配置一周期记录电路以记录霍尔换相信号以产生一周期指示信号;配置一马达电流检测电路以在单相马达正常运转后,检测单相马达经过换相点时的马达电流值;配置一截止角度调整电路以依据换相时的马达电流值产生指示一截止调整角度的截止角度调整信号;配置一角度计算电路接收周期指示信号及截止角度调整信号,以依据周期指示信号的周期产生一换相信号,以及依据截止调整角度产生一截止信号;以及配置一控制电路以对换相信号及截止信号进行处理以产生一控制信号组来控制马达驱动器的多个开关,进而马达驱动器产生一输出信号组来驱动单相马达。
10.优选地,输出信号组包括一第一输出信号及一第二输出信号,且第一输出信号在对应于换相点的一第一切换点处由第一电平切换至第二电平,而第二输出信号提前于第一切换点前的截止调整角度处由第二电平切换为第一电平。
11.优选地,单相马达驱动方法还包括配置截止角度调整电路以判断单相马达换相时的马达电流值是否为零,若否,则进一步判断马达电流值是大于零或小于零,其中响应于马达电流值大于零,配置截止角度调整电路以增加截止调整角度,而响应于马达电流值小于零,配置截止角度调整电路以减少截止调整角度。
12.优选地,单相马达驱动方法还包括:配置角度计算电路接收定义有一提前角度值的一提前角度信号;以及配置角度计算电路依据提前角度值、截止调整角度及周期指示信号的周期产生换相信号。
13.优选地,马达驱动器包括:一输入端,接收一输入电压;一第一输出端;一第二输出端;一第一开关,耦接于输入端与第一输出端之间;一第二开关,耦接于第一输出端与接地端之间;一第三开关,耦接于输入端与第二输出端之间;以及一第四开关,耦接于第二输出端与接地端之间,其中控制信号组包括分别用于控制第一开关、第二开关、第三开关及第四开关的一第一控制信号、一第二控制信号、一第三控制信号及一第四控制信号,以使第一输出端及第二输出端分别输出第一输出信号及第二输出信号。
14.本发明的其中一有益效果在于,本发明所提供的单相马达驱动电路及驱动方法,其能通过检测换相点的马达电流来适应性的调整输出信号的截止调整角度,使换相点马达电流接近电流零点,以达到最佳效率点且避免逆向电流产生,可进而提高效率并降低功耗。
15.为使能更进一步了解本发明的特征及技术内容,请参阅以下有关本发明的详细说明与附图,然而所提供的附图仅用于提供参考与说明,并非用来对本发明加以限制。
附图说明
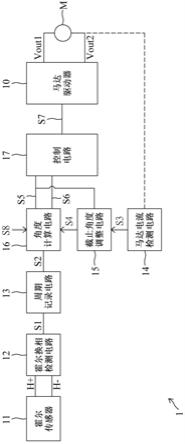
16.图1为根据本发明实施例的单相马达驱动电路的功能方框图。
17.图2为根据本发明实施例的马达驱动器的电路布局图。
18.图3为根据本发明实施例的马达驱动电路的信号时序图。
19.图4为根据本发明实施例的截止角度调整电路的运作流程图。
20.图5为根据本发明实施例的截止调整角度依据马达电流值对输出信号组进行调整的第一示意图。
21.图6为根据本发明实施例的截止调整角度依据马达电流值对输出信号组进行调整的第二示意图。
22.图7为根据本发明实施例的马达驱动电路的另一信号时序图。
23.图8为根据本发明实施例的马达驱动方法的流程图。
具体实施方式
24.以下是通过特定的具体实施例来说明本发明所公开有关“单相马达驱动电路及驱动方法”的实施方式,本领域技术人员可由本说明书所公开的内容了解本发明的优点与效果。本发明可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点与应用,在不背离本发明的构思下进行各种修改与变更。另外,本发明的附图仅为简单示意说明,并非依实际尺寸的描绘,事先声明。以下的实施方式将进一步详细说明本发明的相关技术内容,但所公开的内容并非用以限制本发明的保护范围。另外,本文中所使用的术语“或”,应视实际情况可能包括相关联的列出项目中的任一个或者多个的组合。
25.图1为根据本发明实施例的单相马达驱动电路的功能方框图。参阅图1所示,本发明实施例提供一种单相马达驱动电路1,用于驱动一单相马达m,单相马达驱动电路1包括马达驱动器10、霍尔传感器11、霍尔换相检测电路12、周期记录电路13、马达电流检测电路14、截止角度调整电路15、角度计算电路16及控制电路17。
26.马达驱动器10连接于单相马达m且包括多个开关。可进一步参考图2,其为根据本发明实施例的马达驱动器的电路布局图。如图2所示,马达驱动器包括:接收输入电压vdd的输入端nin、第一输出端out1、第二输出端out2、第一开关q1、第二开关q2、第三开关q3及第四开关q4。第一开关q1耦接于输入端nin与第一输出端out1之间。第二开关q2耦接于第一输出端out1与接地端gnd之间。第三开关q3耦接于输入端nin与第二输出端out2之间。第四开关q4耦接于第二输出端out2与接地端gnd之间。
27.其中,第一开关q1、第二开关q2、第三开关q3及第四开关q4分别由第一控制信号con1、第二控制信号con2、第三控制信号con3及第四控制信号con4所控制,以使第一输出端out1及第二输出端out2分别输出第一输出信号vout1及第二输出信号vout2。其中,第一开关q1、第二开关q2、第三开关q3与第四开关q4可为p型金属氧化物半导体晶体管或n型金属氧化物半导体晶体管。第一开关q1与第三开关q3以两个p型金属氧化物半导体晶体管为例,而第二开关q2与第四开关q4以两个n型金属氧化物半导体晶体管为例。
28.霍尔传感器11经配置以感应单相马达m的转子的磁场大小,并根据单相马达m的工作特性,产生对应霍尔信号组(包括霍尔信号h+及h-)。霍尔换相检测电路12经配置以依据霍尔信号组(包括霍尔信号h+及h-)来检测磁场的正负极性,而对应产生用于指示换相点ps
的一霍尔换相信号s1。
29.举例而言,可进一步参考图3,其为根据本发明实施例的马达驱动电路的信号时序图。如图所示,霍尔换相检测电路12可依据霍尔信号h+及h-判断出换相点ps,以对应产生霍尔换相信号s1。
30.此外,周期记录电路13经配置以记录霍尔换相信号s1以产生一周期指示信号s2。而马达电流检测电路14可用于在单相马达m正常运转后,检测单相马达m经过换相点时的马达电流值im,并对应产生马达电流检测信号s3。
31.在单相马达m正常运转下,控制电路17在控制马达驱动器10产生输出信号组(包括第一输出信号vout1及第二输出信号vout2)时,第一输出信号vout1及第二输出信号vout2依据一截止调整角度offa,以在不同时间点切换,例如,控制电路17产生的控制信号组s7可使第二输出信号vout2提前该截止调整角度offa而于时间t1由高电位切换为低电位,而第一输出信号vout1则于换相点ps处(时间t2)由低电位切换至高电位。在现有状况下,截止调整角度offa为预设的,而无法依据单相马达m的运作环境对应调整,因此在换相点ps处仍会有逆向电流irev存在,而无法达到最佳效率点。
32.而为了达到最佳效率点(亦即,于换相点ps处的马达电流值im需为零),本发明通过马达电流检测电路14检测单相马达m经过换相点时的马达电流值im,而截止角度调整电路15进一步依据换相时的马达电流值im产生指示截止调整角度offa的截止角度调整信号s4。
33.可进一步参考图4,其为根据本发明实施例的截止角度调整电路的运作流程图。进一步详细而言,截止角度调整电路15可在单相马达m正常运转后,依据下列流程对马达电流值im进行判断并产生对应的截止调整角度offa。
34.步骤s30:判断单相马达m换相时,马达电流值im是否为零。
35.响应于判断马达电流值im为零,则进入步骤s31:不改变所使用的截止调整角度offa,并回到步骤s30,持续检测判断马达电流值im。
36.响应于判断马达电流值im不为零,则进入步骤s32:判断马达电流值im是大于零还是小于零。
37.响应于马达电流值im大于零,进入步骤s33:截止角度调整电路15增加截止调整角度offa。例如,增加一度,直到单相马达m再次换相时可再次确认增加后的截止调整角度offa是否可使单相马达m处在最佳效率点。
38.角度计算电路16经配置接收周期指示信号s2及截止角度调整信号s4,以依据周期指示信号s2所指示的周期产生换相信号s5,以及依据截止调整角度offa产生截止信号s6。
39.控制电路17经配置以对换相信号s5及截止信号s6进行处理以产生控制信号组s7来控制马达驱动器10的第一开关q1、第二开关q2、第三开关q3及第四开关q4,进而马达驱动器产生输出信号组(包括第一输出信号vout1及第二输出信号vout2)来驱动单相马达m。
40.可进一步参考图5所示,其为根据本发明实施例的截止调整角度依据马达电流值对输出信号组进行调整的第一示意图。如图5所示,在时间t01时,使用了预设的截止调整角度offa1,而使得马达电流值im在对应时间t01的换相点处为大于0。因此,截止角度调整电路15提升截止调整角度offa1而产生截止调整角度offa2,而进一步判断单相马达m于对应时间t02时的换相点处的马达电流值im。而由图5可知,在时间t02,马达电流值im依然大于
0,因此继续调整截止调整角度offa2。直到时间t0i时使用截止调整角度offai,马达电流值im等于0,达到最佳效率点。
41.而响应于马达电流值im小于零,进入步骤s34:截止角度调整电路15减少截止调整角度offa。例如,减少一度,直到单相马达m再次换相时可再次确认增加后的截止调整角度offa是否可使单相马达m处在最佳效率点。
42.可进一步参考图6所示,其为根据本发明实施例的截止调整角度依据马达电流值对输出信号组进行调整的第二示意图。如图6所示,在时间t11时,使用了预设的截止调整角度offa1’,而使得马达电流值im在对应时间t11的换相点处为小于0。因此,截止角度调整电路15减少截止调整角度offa1’而产生截止调整角度offa2’,而进一步判断单相马达m于对应时间t12时的换相点处的马达电流值im。而由图6可知,在时间t12,马达电流值im依然小于0,因此继续调整截止调整角度offa2’。直到时间t1i时使用截止调整角度offai’,马达电流值im等于0,达到最佳效率点。
43.在一些实施例中,角度计算电路16进一步接收定义有一提前角度值la的提前角度信号,且经配置以依据提前角度值la、截止调整角度offa及周期指示信号s2的周期产生换相信号s5。
44.可参考图7所示,其为根据本发明实施例的马达驱动电路的另一信号时序图。如图7所示,加入提前角度值la之后,换相信号s5将进一步使第一输出信号vout1提前一提前角度值la于换相点ps前的第一切换点p1处由第一电平切换至第二电平(低电平切换至高电平),而第二输出信号vout则提前于第一切换点p1前的截止调整角度offa处(第二切换点p2处)由第二电平切换为第一电平(高电平切换至低电平)。
45.换言之,角度计算电路16可综合依据周期指示信号s2、截止角度调整信号s4及提前角度信号来产生换相信号s5及截止信号s6,使控制电路17依据类似前述图4至图6的流程对应控制马达驱动器10。
46.因此,本发明所提供的单相马达驱动电路能通过检测换相点的马达电流来适应性的调整输出信号的截止调整角度,使换相点马达电流接近电流零点,以达到最佳效率点且避免逆向电流产生,可进而提高效率并降低功耗。
47.请进一步参考图8,其为根据本发明实施例的马达驱动方法的流程图。如图所示,本发明还提供一种单相马达驱动方法,适用于图1所示的单相马达驱动电路1,但不限于此。单相马达驱动方法包括:
48.步骤s80:配置霍尔传感器以感应单相马达的转子的磁场大小,并对应产生霍尔信号组。
49.步骤s81:配置霍尔换相检测电路以依据霍尔信号组来检测磁场的正负极性,而对应产生用于指示换相点的霍尔换相信号。
50.步骤s82:配置周期记录电路以记录霍尔换相信号以产生周期指示信号。
51.步骤s83:配置马达电流检测电路以在单相马达正常运转后,检测单相马达经过换相点时的马达电流值。
52.步骤s84:配置截止角度调整电路以依据换相时的马达电流值产生指示截止调整角度的截止角度调整信号。
53.步骤s85:配置角度计算电路接收周期指示信号及截止角度调整信号,以依据周期
指示信号的周期产生换相信号,以及依据截止调整角度产生截止信号。
54.步骤s86:配置控制电路以对换相信号及截止信号进行处理以产生控制信号组来控制马达驱动器的开关,进而使马达驱动器产生输出信号组来驱动单相马达。
55.实施例的有益效果
56.本发明的其中一有益效果在于,本发明所提供的单相马达驱动电路及驱动方法,其能通过检测换相点的马达电流来适应性的调整输出信号的截止调整角度,使换相点马达电流接近电流零点,以达到最佳效率点且避免逆向电流产生,可进而提高效率并降低功耗。
57.以上所公开的内容仅为本发明的优选可行实施例,并非因此局限本发明的权利要求书的保护范围,所以凡是运用本发明说明书及附图内容所做的等效技术变化,均包含于本发明的权利要求书的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1