爬壁机器人自主充电系统及自主充电方法
1.本发明涉及爬壁机器人技术领域,具体为爬壁机器人自主充电系统及自主充电方法。
背景技术:
2.隧道作为公路、铁路等交通要道的核心组成部分,关系着人员和物流运输的安全和畅通。然而,隧道建成投入运营期间,由于受到地质、地形、气候以及其他自然因素的影响,常存在衬砌开裂、隧道渗水、隧道冻害、衬砌腐蚀等病害,严重情况下将导致隧道突然破坏或坍塌,给行车及人员带来极大的安全隐患或直接威胁。因此,为确保隧道的运行安全,国家、行业相关隧道维护技术规范要求对隧道结构进行时常、定期检查和技术状态评估。
3.目前,我国的隧道运营期结构监控检测方式主要有人工检测、地质雷达探测、激光扫描检测和机器视觉检测等。传统的人工检测、地质雷达探测、激光扫描检测等检测一般采用人工手持,效率低、占时长、人力物力耗费巨大、干扰通行、影响交通流、不安全因素多、限制检测范围、接触面脱空、检测精度差、病害坐标复检定位难等缺点,随着爬壁机器人技术的发展,一种隧道壁面移动式爬壁机器人检测方式开始运用于隧道检测领域。然而传统的爬壁机器人存在运行速度慢、续航里程短、负载轻、人工伴随在现场遥控作业的缺点,相对传统人工作业方式而言,在效率、人力成本等方面优势并不明显、甚至更低。为提高作业效率、节省人力成本,就需要实现爬壁机器人智能化和自主化,使得机器人能够在无人伴随情况下,能够搭载检测设备独立完成隧道壁面检测工作,实现全天候巡航作业。而针对机器人的现场无人化作业,一个重要的问题就是解决机器人的自主充电问题,否则现场无人化作业无从谈起。
技术实现要素:
4.针对上述现有技术中存在的问题,本发明提供一种爬壁机器人自主充电系统及自主充电方法。通过在隧道壁面上每隔特定距离安装自主充电装置,爬壁机器人通过slam同步定位和建图方法创建隧道壁面运行地图,并将隧道壁面上布置的充电装置标记在地图上,当爬壁机器人电量不足或工作完成时,爬壁机器人搜寻最近充电装置,并自主规划路径、自主导航运行至最近充电装置处,此装置可为爬壁机器人进行电量补充和不工作时提供停放位置等功能,实现机器人的自主充电。
5.本发明提供的爬壁机器人自主充电系统,包括安装框架、用于爬壁机器人进入时的对中装置、自动伸缩充电装置和压紧装置。
6.所述安装框架固定于隧道壁面上。
7.所述对中装置对称固定在安装框架的两侧,在两个对中装置之间形成由宽变窄的爬壁机器人进入通道,用于引导爬壁机器人进入实现精确定位。
8.所述压紧装置对称安装在位于爬壁机器人进入口处的安装框架的两侧,包括压板、顶板、齿条、第一电机、导轨,所述导轨固定在安装框架上,所述顶板滑动安装在导轨内,
所述齿条固定在顶板的底面,所述电机固定在安装框架上,在电机输出端固定有与齿条啮合的齿轮,所述压板一端固定在顶板的底面,另一端向内延伸,当两侧的压板合上后,使压板正好压在爬壁机器人的顶部。
9.所述自动伸缩充电装置包括底部支撑座、充电装置固定绝缘板、充电装置活动机构、第二电机、行程开关,所述底部支撑座固定在安装框架的底部,所述充电装置固定绝缘板固定在底部支撑座上端面,在充电装置固定绝缘板的顶部中间位置开有圆孔,所述充电装置活动机构活动安装在充电装置固定绝缘板内,充电装置活动机构包括与圆孔位置相对应的充电插头,所述第二电机固定在底部支撑座上,用于驱动充电装置活动机构上下移动,所述行程开关固定在底部支撑座的上端面,当爬壁机器人进入到预定位置时可压下行程开关,所述行程开关与第一电机、第二电机电信号连接。
10.进一步地,所述充电装置活动机构包括竖向固定在充电装置固定绝缘板上的导向柱,在导向柱上套有活动板,活动板上端与圆孔位置相对应处固定有充电插头,在活动板的底端固定有连接架,连接架底部开设有带螺纹的圆孔,所述第二电机固定在底部支撑座的下端,第二电机的输出端连接有丝杠,所述丝杠另一端穿过连接架上的圆孔并与圆孔螺纹连接。
11.进一步地,所述导轨内安装有中部带凹槽的滑轮,所述顶板的底面固定有导条,所述导条嵌入在滑轮中部的凹槽内。
12.进一步地,所述压板的下端部安装有软海绵。
13.进一步地,所述对中装置包括固定在安装框架上的保持架,两个保持架相对一侧呈平滑曲线设置使得爬壁机器人进入通道从入口处向内由宽变窄,并且在该侧面设有开口,在开口处设置有一排橡胶套,所述橡胶套通过销轴转动安装在保持架上。
14.进一步地,所述销轴两头宽、中部略细,所述橡胶套为圆柱形,橡胶套安装在销轴中部并与销轴为间隙配合,橡胶套可在销轴上自由转动,销轴两端与保持架为过盈配合。
15.进一步地,所述顶板上设有用于感应爬壁机器人接近的传感器,所述传感器与第一电机电信号连接。
16.进一步地,靠近隧道壁面一侧的导轨中部断开,使得在安装框架上部形成无阻挡的爬壁机器人入口。
17.本发明还提供了一种爬壁机器人自主充电方法,包括以下步骤:s1:根据现场实际情况,在隧道壁面上间隔安装多个爬壁机器人自主充电系统;s2:爬壁机器人通过slam同步定位和建图方法创建隧道壁面运行地图,并在地图上标记隧道壁面上布置的充电装置的位置,包括各个自主充电系统的序号、曲面坐标及入口角度;s3:爬壁机器人根据预设巡检作业路线,在隧道壁面进行自主巡检作业,机器人实时监控电池电量,当机器人电量低于预设阈值时,机器人在地图上搜寻最近自主充电系统,确定最近自主充电系统位置和充电入口信息;s4:机器人进行自主最优路径规划,然后沿自主规划路径运行至自主充电系统附近,与自主充电系统入口角度信息进行比对,调整机器人位姿,同时通过自主充电系统入口的对中装置,完成机器人充电口与充电插头的自动、精准对接;s5:充电装置启动,对机器人进行充电,充电完成后,机器人重新规划运行路径,回
到巡检作业路线,开展例行巡检作业工作;s6:机器人完成巡检作业任务后,也可以回到最近充电装置,运行方法与前述相同。
18.为实现全天候作业、提高作业效率,可以根据作业任务及安排,在巡检路线上布置多台爬壁机器人。
19.本发明的有益效果在于:根据实际情况通过在隧道壁面上每隔特定距离安装此装置,当爬壁机器人在持续工作时电量不足或工作任务完成时,爬壁机器人只需运动至此装置内,此装置配有爬壁机器人对中装置及自动伸缩充电头,可为爬壁机器人进行电量补充和不工作时提供停放位置等功能,提高了工作效率,减少了人力物力消耗。
附图说明
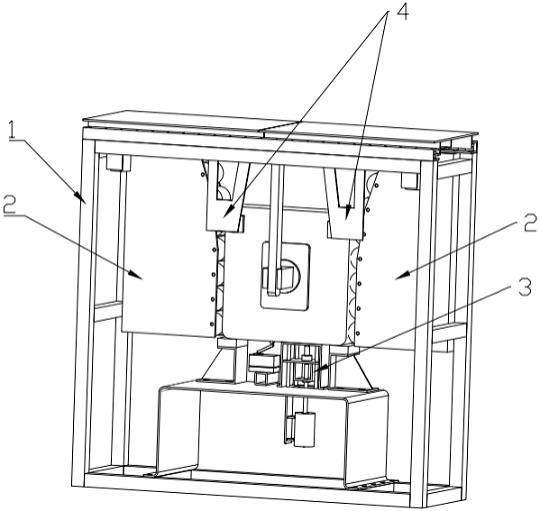
20.图1是本发明实施例的整体结构示意图。
21.图2是本发明实施例的对中装置的结构示意图。
22.图3是本发明对中装置销轴与橡胶套配合状况示意图。
23.图4是本发明实施例的压紧装置的结构示意图。
24.图5是本发明实施例的自动伸缩充电装置的结构示意图。
25.图中:1、安装框架,2、对中装置,3、自动伸缩充电装置,4、压紧装置,201、保持架,202、橡胶套,203、销轴,301、固定绝缘板,302、圆孔,303、充电装置活动机构,304、导向柱,305、第二电机,306、行程开关,307、底部支撑座,401、压板,402、软海绵,403、顶板,404、齿条,405、第一电机,406、滑轮,407、导轨。
具体实施方式
26.为了便于理解本发明,下文将结合说明书附图和较佳的实施例对本发明作更全面、细致地描述,但本发明的保护范围并不限于以下具体的实施例。
27.如图1所示,本实施例的一种爬壁机器人自主充电系统,包括安装框架1、用于爬壁机器人进入时的对中装置2、自动伸缩充电装置3和压紧装置4。所述安装框架1固定于隧道壁面上,由铝型材构成。
28.如图1、图2所示,所述对中装置2对称固定在安装框架1的两侧,包括固定在安装框架1上的保持架201,两个保持架201相对一侧呈平滑曲线设置,使得两个保持架201之间形成的爬壁机器人进入通道从入口处向内由宽变窄,并且在该侧面设有开口,在开口处设置有一排橡胶套202,所述橡胶套202通过销轴203转动安装在保持架201上。如图3所示,所述销轴203两头宽、中部略细,所述橡胶套202为圆柱形,橡胶套202安装在销轴203中部并与销轴203为间隙配合,橡胶套202可在销轴203上自由转动,销轴203两端与保持架201为过盈配合。在爬壁机器人进入该装置时,爬壁机器人侧面与橡胶套202直接接触,橡胶套与爬壁机器人的侧面为滚动摩擦,由于橡胶套202的推动作用,可以使爬壁机器人在进入的过程中不断实现对中,橡胶套202具有足够的弹性,不会对爬壁机器人侧边造成损害,同时橡胶套的转动减小了爬壁机器人前进时的阻力。
29.如图1、图4所示,所述压紧装置4对称安装在位于爬壁机器人进入口处的安装框架1的两侧,包括压板401、顶板403、齿条404、第一电机405、导轨407。所述导轨407固定在安装
框架1上,靠近隧道壁面一侧的导轨407中部断开,使得在安装框架1上部形成无阻挡的爬壁机器人入口,爬壁机器人能够由此顺利进出。所述导轨407内安装有中部带凹槽的滑轮406,所述顶板403的底面固定有导条,所述导条嵌入在滑轮406中部的凹槽内,使顶板403只能在导轨407中左右滑动,并可保证顶板403在压板401的反作用力下不会出现翻转。所述齿条404固定在顶板403的底面,所述电机405固定在安装框架1上,在电机405输出端固定有与齿条404啮合的齿轮。在顶板403上设有用于感应爬壁机器人接近的传感器,所述传感器与第一电机405电信号连接,当爬壁机器人接近入口处时,第一电机405接收到传感器发送的控制信号并启动,从而驱动顶板403自动打开。所述压板401一端固定在顶板403的底面,另一端向内延伸,并压板401的下端部安装有软海绵402。当顶板403合上时,同时会带动压板401也合上,压板401下端部的软海绵402正好压在爬壁机器人顶板上,把爬壁机器人压在墙面上,从而保证当爬壁机器人不工作时,也不会从墙壁上掉落。整个压紧装置既起到了防尘密封的效果,也起到了固定爬壁机器人的效果。
30.如图1、图5所示,所述自动伸缩充电装置3包括底部支撑座307、充电装置固定绝缘板301、充电装置活动机构303、第二电机305、行程开关306。所述底部支撑座307固定在安装框架1的底部,所述充电装置固定绝缘板301固定在底部支撑座307上端面,在充电装置固定绝缘板301的顶部中间位置开有圆孔302,该充电装置固定绝缘板301可以起到保护电路的作用,并与外界保持绝缘。所述充电装置活动机构303活动安装在充电装置固定绝缘板301内,包括竖向固定在充电装置固定绝缘板301上的导向柱304,在导向柱上套有活动板,活动板上端与圆孔302位置相对应处固定有充电插头,在活动板的底端固定有连接架,连接架底部开设有带螺纹的圆孔,所述第二电机305固定在底部支撑座307的下端,第二电机305的输出端连接有丝杠,所述丝杠另一端穿过连接架上的圆孔并与圆孔螺纹连接,第二电机305可驱动充电装置活动机构303上下移动。所述行程开关306固定在底部支撑座307的上端面,当爬壁机器人进入到预定位置时可压下行程开关306,所述行程开关306与第一电机405、第二电机305电信号连接。当爬壁机器人将行程开关306压下后,第一电机405反向转动,驱动顶板403合上,同时,第二电机305启动,通过丝杠将充电装置活动机构303向上抬升,使充电头插入爬壁机器人充电孔,当爬壁机器人充电完毕时,第二电机305反向转动,通过丝杠使充电装置活动机构下降,使充电头从爬壁机器人充电孔中拔出。
31.本发明的一种爬壁机器人自主充电方法,包括以下步骤:s1:根据现场实际情况,在隧道壁面上间隔安装多个爬壁机器人自主充电系统;s2:爬壁机器人通过slam同步定位和建图方法创建隧道壁面运行地图,并在地图上标记隧道壁面上布置的充电装置的位置,包括各个自主充电系统的序号、曲面坐标及入口角度;s3:爬壁机器人根据预设巡检作业路线,在隧道壁面进行自主巡检作业,机器人实时监控电池电量,当机器人电量低于预设阈值时,机器人在地图上搜寻最近自主充电系统,确定最近自主充电系统位置和充电入口信息;s4:机器人进行自主最优路径规划,然后沿自主规划路径运行至自主充电系统附近,与自主充电系统入口角度信息进行比对,调整机器人位姿,同时通过自主充电系统入口的对中装置,完成机器人充电口与充电插头的自动、精准对接;s5:充电装置启动,对机器人进行充电,充电完成后,机器人重新规划运行路径,回
到巡检作业路线,开展例行巡检作业工作;s6:机器人完成巡检作业任务后,也可以回到最近充电装置,运行方法与前述相同。
32.为实现全天候作业、提高作业效率,可以根据作业任务及安排,在巡检路线上布置多台爬壁机器人,自主充电系统可以为多台机器人提供电量补充。
33.在前述说明书与相关附图中存在的教导的帮助下,本发明所属领域的技术人员将会想到本发明的许多修改和其它实施方案。因此,要理解的是,本发明不限于公开的具体实施方案,修改和其它实施方案被认为包括在所附权利要求的范围内。尽管本文中使用了特定术语,它们仅以一般和描述性意义使用,而不用于限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1