BLDC电机全转速段异常音主动消除方法及装置与流程
bldc电机全转速段异常音主动消除方法及装置
技术领域
1.本发明涉及永磁同步bldc电机系统的异常音消除技术领域,具体涉及bldc电机全转速段异常音主动消除方法及装置。
背景技术:
2.随着生活水平日益提高,人们对空调静音的需求越来越苛刻。目前,对空调风机电机的降噪处理,主要通过在结构上修改塑胶弹垫的材质来改变弹垫软硬程度或者更改本体结构,又或者在控制上通过更改进角的方式来消除和抑制噪音。
3.永磁同步电机在工作过程中,由于pwm开关器件死区时间、管压降等特性以及电机本身气隙磁场畸变将造成电机定子相电流畸变,使定子相电流中不仅含有基波分量,同时含有5次、7次、11次、13次等高次谐波分量,这些分量容易造成电机转矩脉动增大,转速产生抖动、不稳定,同时有可能使电机与风机系统共振产生异常音。上述方法各自存着一定的缺陷,仅仅能一定范围内抑制和降低噪音。通过修改塑胶弹垫的材质来改变弹垫软硬程度不仅需要打样各种材料配比的弹垫,还需要经过大量的实验,不仅周期长,而且在人工和测试上耗费颇多,而最终的成果只能解决某些转速段和频率段的噪音,对于上述的异常音无能为力;至于更改本体结构则需要重新开模,开模周期较长,费用昂贵;若在控制上采用更改进角的方式来降噪,则会直接影响电机效率,而且即使能够抑制某些频率段和转速噪音,但是其在其他转速段和频率段时仍然会出现异常音。
4.为此,急需研制成本低,且能够实现bldc电机全转速段异常音主动消除方法及装置。
技术实现要素:
5.本发明所要解决的技术问题是克服上述现有bldc电机降噪成本高且仅能作用部分转速段的缺陷,提供成本低的bldc电机全转速段异常音主动消除方法及装置。
6.为实现上述目的,本发明在第一方面通过以下技术方案得以实现:bldc电机全转速段异常音主动消除方法,基于电流谐波补偿对电机进行降噪,包括以下步骤,s1:获取电机的三相电流、电角度θ、和角速度ω,并结合预先获得电机系统的噪声和频谱数据,分析计算出电流谐波补偿所需要的噪音频率与基波频率的倍数n,参考系数x,补偿电角度n
θ
,以及对所述参考系数x变换噪音补偿所需要的dq轴电流n
θid
和n
θiq
;s2:获取电机矢量控制系统的i
dref
和i
qref
并根据所述补偿电角度n
θ
,计算出主动噪音补偿所需要的目标电压补偿值n
θvalpha
和n
θvbeta
,计算出电压补偿值n
θidref
和n
θiqref
;s3:根据在步骤s1和步骤s2中计算出的n
θ
、n
θid
、n
θiq
、n
θidref
和n
θiqref
,计算出补偿后参考电压矢量v
alpha
和v
beta
;s4:根据步骤s3中计算出的v
alpha
和v
beta
生成pwm信号,用以控制三相逆变器来驱动电机。
7.本发明进一步优选方案为:在所述的步骤s1中,所述电机的噪声和频谱数据为电机未进行补偿时,在调速过程中的采集的噪音频谱分析信息;通过所述角速度ω计算出当前转速,并根据当前转速在所述噪声和频谱数据中找到对应该转速的噪音频率与基波频率
的倍数n以及系数x。
8.本发明进一步优选方案为:所述补偿电角度n
θ
为所述角速度ω与倍数n相乘后进行积分运算的值。
9.本发明进一步优选方案为:所述对参考系数x变换噪音补偿所需要的dq轴电流n
θid
和n
θiq
的计算公式如下:
10.n
θiq
=i
beta
*cos(n
θ
)*x
‑
i
alpha
*sin(n
θ
)*x
ꢀꢀꢀꢀ
(1);
11.n
θid
=i
beta
*sin(n
θ
)*x+i
alpha
*cos(n
θ
)*x
ꢀꢀꢀꢀ
(2);
12.式中i
alpha
和i
beta
的数值是通过将ia和ib进行旋转坐标系向静止坐标系转换获得的;ia为电机的a相电流,ib为电机的b相电流;旋转坐标系向静止坐标系转换的公式为
13.i
alpha
=ia
ꢀꢀꢀꢀ
(3);
[0014][0015]
本发明进一步优选方案为:所述的补偿后参考电压矢量v
alpha
和v
beta
的计算过程如下:
[0016]
计算n
θidref
与n
θid
的偏差值,其结果进行低通滤波得n
θvd
;计算n
θiqref
与n
θiq
的偏差值,其结果也进行低通滤波得n
θvq
。
[0017]
分别将n
θvd
和n
θvq
带入下列公式
[0018]
n
θvalpha
=
‑
(n
θvd
*cos(n
θ
)
‑
n
θvq
*sin(n
θ
))
ꢀꢀꢀꢀ
(5)
[0019]
n
θvbeta
=
‑
(n
θvq
*cos(n
θ
)+n
θvd
*sin(n
θ
))
ꢀꢀꢀꢀ
(6)
[0020]
计算出电压补偿值n
θvalpha
和n
θvbeta
。
[0021]
最后将预先从电机矢量控制系统获得的valpha和vbeta值分别减去计算出的电压补偿值n
θvalpha
和n
θvbeta
,得到补偿后参考电压矢量v
alpha
和v
beta
。
[0022]
本发明在第二方面提供了bldc电机全转速段异常音主动消除装置,设置在bldc电机的控制电路上,bldc电机的控制电路包括矢量控制器、空间矢量脉宽调制电路,以及与bldc电机相连的三相逆变器;所述bldc电机全转速段异常音主动消除装置采用如第一方面所述的bldc电机全转速段异常音主动消除方法,所述bldc电机全转速段异常音主动消除装置包括参考值计算模块、噪声分析模块,以及噪声处理模块;
[0023]
所述噪声分析模块,有两组输入端和一第一计算单元,一组输入端耦接于三相逆变器的输出端,以获取电机当前的三相电流,另一组输入端耦接于所述矢量控制器,以获取对当前的电角度θ、和角速度ω;并通过第一计算单元计算出电流谐波补偿所需要的噪音频率与基波频率的倍数n,参考系数x,补偿电角度n
θ
,以及对所述参考系数x变换噪音补偿所需要的dq轴电流n
θid
和n
θiq
;
[0024]
所述参考值计算模块,具有三个输入端和一第二计算单元;一输入端耦接于所述矢量控制器,以获取对当前的i
dref
和i
qref
参数,一输入端耦接于所述噪声分析模块,以获取补偿电角度n
θ
,另一输入端耦接于数据储存器,以读取记载在数据储存器上的噪音频谱分析信息;并通过第二计算单元计算出主动噪音补偿所需要的目标电压补偿值n
θvalpha
和n
θvbeta
,计算出电压补偿值n
θidref
和n
θiqref
;
[0025]
所述噪声处理模块,具有第三计算单元,根据第一计算单元和第二计算单元的计算结果计算出补偿后参考电压矢量v
alpha
和v
beta
,并将计算结果传输给空间矢量脉宽调制电路,以使三相逆变器根据生成pwm信号来驱动电机。
[0026]
综上所述,本发明具有以下有益效果:使用电流谐波补偿的主动噪音抑制(降噪)技术,在不改变风机电机本体结构和安装方式的情况下配合现有塑胶弹垫,有效抑制由于电流振动谐波引起的噪音(异常音),保证电机系统全转速段范围内的运行噪音最低。此方法基于实际采样反馈的电流信息,对输出的电压进行补偿,可以有效抑制由于电流振动谐波引起的噪音,以消除空调风机电机运行时和系统引起的噪音共振为目的,能够消除全转速段和全频段的异常音。且本方法实施简单,运算数据量较小,方便低成本方式实现。
附图说明
[0027]
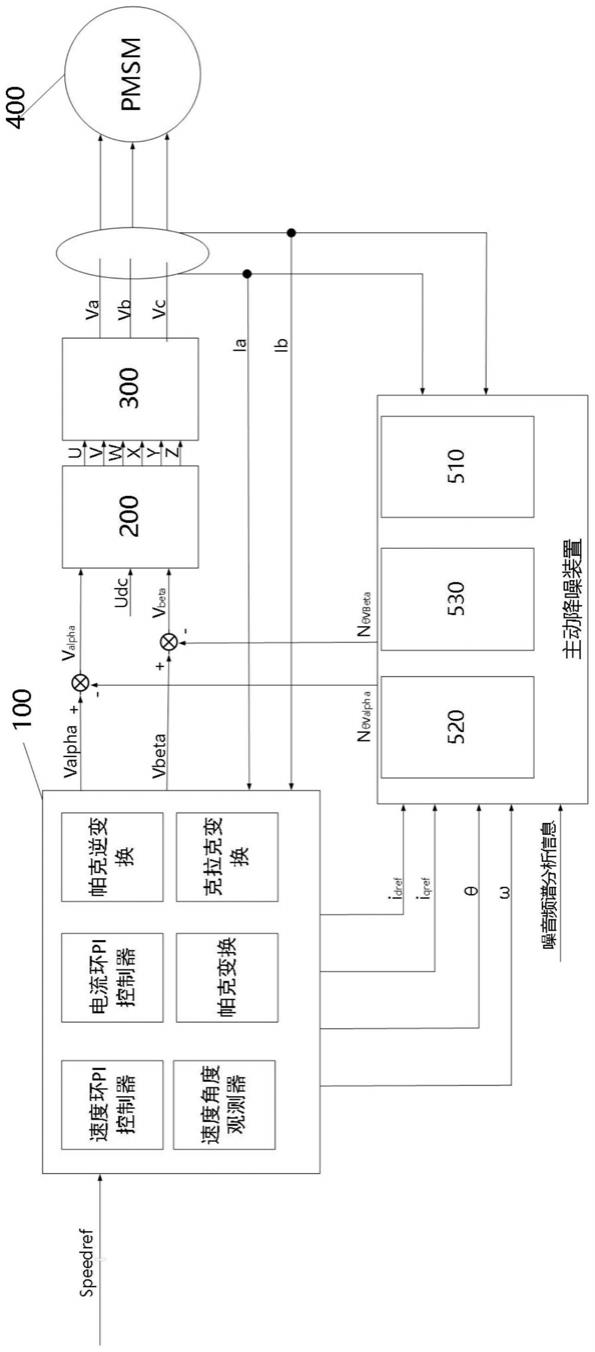
图1是本发明所述bldc电机全转速段异常音主动消除装置的结构框图。
[0028]
图2是本发明所述噪声分析模块的结构框图。
[0029]
图3是本发明所述参考值计算模块的结构框图。
[0030]
图4是本发明所述噪声处理模块的结构框图。
[0031]
图5是使用本发明所述异常音主动消除方法补偿前后所测频谱噪音差值(噪音总值
‑
噪音峰值)数据折线图。
[0032]
图6和7分别是使用本发明所述异常音主动消除方法前、后的噪音频谱分析结果。
[0033]
图8是本发明所述bldc电机的结构示意图。
[0034]
其中:100、矢量控制器;200、空间矢量脉宽调制电路;300、三相逆变器;400、电机;510、噪声分析模块;520、参考值计算模块;530、噪声处理模块。
具体实施方式
[0035]
以下结合附图对本发明作进一步详细说明。
[0036]
本实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
[0037]
如图1
‑
4、和8所示,本实施例提供了bldc电机全转速段异常音主动消除装置,该装置设置在bldc电机400的控制电路上,bldc电机400的控制电路包括矢量控制器100、空间矢量脉宽调制电路200,以及与bldc电机400相连的三相逆变器300。该装置采用了bldc电机400异常音主动消除方法,基于实际采样反馈的电流信息,对输出的电压进行补偿,可以有效抑制由于电流振动谐波引起的噪音,以消除空调风机电机400运行时和系统引起的噪音。bldc电机全转速段异常音主动消除装置包括参考值计算模块520、噪声分析模块510,以及噪声处理模块530。
[0038]
噪声分析模块,有两组输入端和一第一计算单元,一组输入端耦接于三相逆变器的输出端,以获取电机当前的三相电流(通过),另一组输入端耦接于矢量控制器,以获取对当前的电角度θ、和角速度ω;并通过第一计算单元计算出电流谐波补偿所需要的噪音频率与基波频率的倍数n,参考系数x,补偿电角度n
θ
,以及对参考系数x变换噪音补偿所需要的dq轴电流n
θid
和n
θiq
。
[0039]
参考值计算模块,具有三个输入端和一第二计算单元;一输入端耦接于矢量控制器,以获取对当前的i
dref
和i
qref
参数,一输入端耦接于噪声分析模块,以获取补偿电角度n
θ
,
另一输入端耦接于数据储存器,以读取记载在数据储存器上的噪音频谱分析信息;并通过第二计算单元计算出主动噪音补偿所需要的目标电压补偿值n
θvalpha
和n
θvbeta
,计算出电压补偿值n
θidref
和n
θiqref
。
[0040]
噪声处理模块,具有第三计算单元,根据第一计算单元和第二计算单元的计算结果计算出补偿后参考电压矢量v
alpha
和v
beta
,并将计算结果传输给空间矢量脉宽调制电路,以使三相逆变器根据生成pwm信号来驱动电机。
[0041]
此处所采用bldc电机的异常音主动消除方法,是基于电流谐波补偿对电机进行降噪,主要包括以下步骤,s1:获取电机的三相电流、电角度θ、和角速度ω,并结合预先获得电机的噪声和频谱数据,分析计算出电流谐波补偿所需要的噪音频率与基波频率的倍数n,参考系数x,补偿电角度n
θ
,以及对参考系数x变换噪音补偿所需要的dq轴电流n
θid
和n
θiq
。s2:获取电机矢量控制系统的i
dref
和i
qref
并根据补偿电角度n
θ
,计算出主动噪音补偿所需要的目标电压补偿值n
θvalpha
和n
θvbeta
,计算出电压补偿值n
θidref
和n
θiqref
。s3:根据在步骤s1和步骤s2中计算出的n
θ
、n
θid
、n
θiq
、n
θidref
和n
θiqref
,计算出补偿后参考电压矢量v
alpha
和v
beta
。
[0042]
s4:根据步骤s3中计算出的v
alpha
和v
beta
生成pwm信号,用以控制三相逆变器来驱动电机。
[0043]
在步骤s1中,电机的噪声和频谱数据为电机未进行补偿时,在调速过程中的采集的噪音频谱分析信息;通过角速度ω计算出当前转速,并根据当前转速在噪声和频谱数据中找到对应该转速的噪音频率与基波频率的倍数n以及系数x。而补偿电角度n
θ
为角速度ω与倍数n相乘后进行积分运算的值。
[0044]
对参考系数x变换噪音补偿所需要的dq轴电流n
θid
和n
θiq
的计算公式如下:
[0045]
n
θiq
=i
beta
*cos(n
θ
)*x
‑
i
alpha
*sin(n
θ
)*x
ꢀꢀꢀꢀ
(1);
[0046]
n
θid
=i
beta
*sin(n
θ
)*x+i
alpha
*cos(n
θ
)*x
ꢀꢀꢀꢀ
(2);
[0047]
式中i
alpha
和i
beta
的数值是通过将ia和ib进行旋转坐标系向静止坐标系转换获得的;ia为电机的a相电流,ib为电机的b相电流;
[0048]
旋转坐标系向静止坐标系转换的公式为
[0049]
i
alpha
=ia
ꢀꢀꢀꢀ
(3);
[0050][0051]
补偿后参考电压矢量v
alpha
和v
beta
的计算过程如下:
[0052]
计算n
θidref
与n
θid
的偏差值,其结果进行低通滤波得n
θvd
;计算n
θiqref
与n
θiq
的偏差值,其结果也进行低通滤波得n
θvq
。
[0053]
分别将n
θvd
和n
θvq
带入下列公式
[0054]
n
θvalpha
=
‑
(n
θvd
*cos(n
θ
)
‑
n
θvq
*sin(n
θ
))
ꢀꢀꢀꢀ
(5)
[0055]
和公式n
θvbeta
=
‑
(n
θvq
*cos(n
θ
)+n
θvd
*sin(n
θ
))
ꢀꢀꢀꢀ
(6)
[0056]
计算出电压补偿值n
θvalpha
和n
θvbe
ta。
[0057]
将预先从电机矢量控制系统获得的valpha和vbeta值分别减去计算出的电压补偿值n
θvalpha
和n
θvbeta
,得到补偿后参考电压矢量v
alpha
和v
beta
。即按照下列公式进行计算
[0058]
v
alpha
=valpha
‑
n
θvalpha
ꢀꢀꢀꢀ
(7)
[0059]
v
beta
=vbeta
‑
n
θvbeta
ꢀꢀꢀꢀ
(8)
[0060]
使用上述的bldc电机全转速段异常音主动消除装置和异常音主动消除方法对电机进行降噪,其实验结果如图5
‑
7。
[0061]
图5是使用本发明所述异常音主动消除方法补偿前后所测频谱噪音差值(噪音总值
‑
噪音峰值)数据折线图。图中表示补偿前数据,表示补偿后数据,从数据中可以看到,补偿后数据差值明显优于补偿前数据,一般人耳认为差值>=10db(a)为无噪音。
[0062]
图6是本装置使用本方法前,某转速下的噪音频谱分析结果。图7是本装置使用本方法后,相同转速下的噪音频谱分析结果。
[0063]
根据图6和图7补偿前后频谱图分析,160hz噪音峰值从26.8db(a)削弱到16.2db(a),被明显削弱,并且440hz以及580hz噪音峰值通过本发明的方法后被同步削弱。因此,本方法能有效抑制由于电流振动谐波引起的噪音,以消除空调风机电机运行时和系统引起的噪音共振为目的,实现200rpm
‑
950rpm全转速段无异常音运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1