一种基于磁作用传动的电动旋转装置的制作方法
1.本实用新型涉及电动机械装置的设计领域,具体涉及一种基于磁作用传动的电动旋转装置。
背景技术:
2.电动旋转装置是一种电能与机械能的转换装置,应用广泛,其最常见的机械能输出形式是通过转轴,传动方式除了与负载的转轴固连,也有不少非转轴传动的机械能输出形式。例如有些转矩设计为在转轴上附加飞轮、通过飞轮的外缘对外提供机械能,该类转矩的传动形式通常是使用传动带,通过传动带使从动轮获得传动转矩,从而达到改变转速的设计目的;也有不少设计是在转轴附加飞轮的外缘设置有齿,把转矩传动到外缘同样设置有齿的从动旋转轮。
3.转矩传动的智能控制研究近年较活跃,例如一些电动转矩的负载并不需要绝对稳速,可以设计智能控制装置,当负载达到转速上限时把主动轮脱离并断电,而当负载降到转速下限时对电动转矩重新通电并偶联,从而达到节电的目的。为了更方便控制电动转矩与负载的偶联,不少设计方案是使用磁力传动,这类磁力传动机构最明显的结构特点是:主动轮和从动轮的外缘设置有磁极沿切线或法线方向设置的永磁体,两轮相邻但不接触,从动轮转轴机输出的转矩传动损耗较大。
4.本申请主要是针对这类磁力传动机构的结构改良而提出。
技术实现要素:
5.本实用新型的目的,在于克服现有一些电动旋转装置及其传动机构的设计缺陷,提供一种主动轮与变矩轮同轴向位于不同平面设置的传动装置,通过磁作用传动的方式使变矩轮获得设定转矩的设计目的,传动效率高,工艺容易实现。
6.为实现上述的技术目标,本实用新型提供了一种基于磁作用传动的电动旋转装置,该电动旋转装置包括电动装置和传动装置;所述的传动装置包括主动轮、变矩轮和若干永磁体;所述的主动轮环绕轮缘相间排布有若干磁极沿转轴方向设置的永磁体;所述的变矩轮环绕轮缘相间排布有若干磁极沿转轴方向设置的永磁体;所述的主动轮与变矩轮以轮缘相嵌的方式在不同平面同轴向相邻安装,两轮之间设置间隙;所述的电动装置包括旋转电动机、电源和控制系统,电动机的电源输入端连接所述电源或控制系统;电动机的转子与所述主动轮的转轴机械固连。当电动机驱动所述主动轮旋转时,设置于主动轮、变矩轮上的若干永磁体周期性相对,通过磁作用使变矩轮获得传动转矩。
7.本实用新型中,所述的主动轮、变矩轮为固体成型材料制成的机械旋转体;所述的永磁体为磁钢、钕铁硼等一类本领域技术人员公知的永磁性材料;所述的转轴方向为转轴两端的连线及其延长线方向;所述永磁体的磁极方向由永磁体n/s的两个磁极所确定;所述间隙的设计与电动旋转装置的功率及永磁体的磁通密度相关;所述主动轮与变矩轮的轮缘相嵌,表述了两轮在不同平面同轴向相邻设置的部位;所述若干永磁体的周期性磁作用,源
于主动轮旋转时在间隙产生的变化磁场。
8.上述技术方案中,所述主动轮上的永磁体沿轮缘切线方向的弧长为m1,永磁体之间的间距为m2;所述变矩轮上的永磁体沿轮缘切线方向的弧长为n1,永磁体之间的间距为n2;设置为(m1+n1)=(m2+n2)。
9.上述技术方案中,所述设置于主动轮/变矩轮上的永磁体同磁极方向排布,或以磁极n
‑
s交替的方式排布。
10.上述技术方案中,所述的主动轮、变矩轮在传动装置中设置至少1个。设置多个主动轮、变矩轮有利于增强两轮之间的磁力相互作用。
11.上述技术方案中,所述的变矩轮环绕转轴固连有磁环或若干磁极同方向排布的永磁体,磁环或若干永磁体的磁极方向与变矩轮转轴的法线重合。该技术方案的涵义是变矩轮的转轴输出端设计有转矩传动的磁悬浮装置,变矩轮的转矩负载以相应的磁悬浮装置偶联;所述磁极方向与变矩轮转轴的法线重合,意为磁环或若干永磁体中的磁极(无论n极还是s极)是面向变矩轮转轴的轴心。
12.上述技术方案中,所述电动机的转轴与传动装置的主动轮的转轴机械固连。对电动机的转轴描述,技术含义是选用转轴输出的电动机。
13.作为上述电动旋转装置的一种技术方案改进,所述的主动轮设置为环形,其环形转轴套装在电动机的外转子上并机械固连。技术含义是选用外转子式电动机。
14.作为上述电动旋转装置的再一种技术方案改进,电动机的外转子与所述磁偶对装置的主动轮一体化设计。
15.以上所述的传动装置以及电动旋转装置在安装时需要机械架件,机械架件在有效实现机械支撑的前提下,所选用的材料和结构任意。
16.本实用新型中,所述的传动装置与常规皮带、齿轮等机械传动方案的本质区别,在于主动轮与变矩轮不发生机械接触,主动轮对变矩轮的磁能量传递,是通过两轮之间的间隙磁场的分布状态改变而变换为变矩轮的转矩,当变矩轮具有一定质量并且旋转速度足够时,可在具体设计中充分运用变矩轮的旋转惯量,从而为电动装置依据变矩轮及其负载惯量状态提供了一种智能控制的结构新思路,例如通过变矩轮的转矩及其负载的惯量状态监测,以及结合电动机的转轴位移控制,可有效控制电动机的运转状态以达到节能的设计目标。
17.本实用新型的优点在于:传动装置中主动轮对变矩轮的能量传递是采用磁相互作用,两者之间不发生机械接触,降低了机械能传动损耗,从而为电动旋转装置提供了一种智能控制电动机的设计新思路;以此方案设计的电动旋转装置的结构简单、组合多样化,有效适应高端应用领域的设计要求。
附图说明
18.图1a是本实用新型所述永磁体磁极设置方向与轮缘切线、法线的示意图;
19.图1b是所述永磁体在轮缘的磁极设置方向示意图;
20.图2a是一种在主动轮的轮缘设置4个永磁体的俯视结构示意图;
21.图2b是图2a示例的侧视结构示意图;
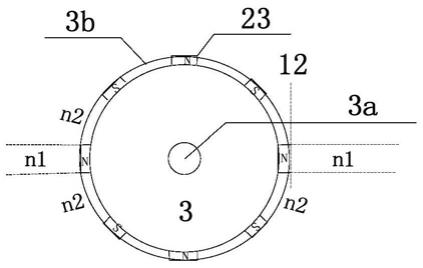
22.图3是一种在变矩轮的轮缘上设置8个转磁体的结构示意图;
23.图4a是一种主动轮与变矩轮的安装结构示意图;
24.图4b是图4a安装结构示例的轴向投影示意图;
25.图5是一个主动轮与两个变矩轮的一种安装结构示意图;
26.图6是变矩轮环绕转轴固连有磁环的一种结构示意图;
27.图7是一种电动旋转装置的安装结构局部示意图;
28.图8a是一种所述主动轮套装在电动机外转子的结构示意图;
29.图8b是一种所述主动轮与电动机外转子一体化设计的结构示意图;
30.附图标识:
31.1、主动轮
ꢀꢀꢀꢀꢀꢀ
1a、主动轮转轴
ꢀꢀꢀꢀꢀ
1b、主动轮轮缘
ꢀꢀꢀꢀꢀ
2、磁环
32.3、变矩轮
ꢀꢀꢀꢀꢀꢀ
3a、变矩轮转轴
ꢀꢀꢀꢀ
3b、变矩轮轮缘
ꢀꢀꢀꢀꢀ
4、间隙
33.5、磁极线
ꢀꢀꢀꢀꢀꢀ
6、电动机
ꢀꢀꢀꢀꢀꢀꢀꢀ
6a、电动机转轴
ꢀꢀꢀꢀꢀ
6b、外转子
34.10、轮平面法向
ꢀꢀ
11、轮的平面线
ꢀꢀꢀꢀ
12、轮缘切线
ꢀꢀꢀꢀꢀꢀꢀ
13、法线
35.21、主动轮永磁体
ꢀꢀ
23、变矩轮永磁体
具体实施方式
36.下面结合附图和实施例进一步对本实用新型进行详细说明。
37.本实用新型所述的电动旋转装置包括电动装置和传动装置,其中,所述的传动装置不仅与皮带传动和齿轮传动具有本质区别,也与现有磁力传动机构的设计有所区别,首先是永磁体在轮缘部位的磁极设置方案不同。
38.现有技术中,磁力盘机构的n/s磁极是在轮缘设置为沿轮缘切线12方向或沿法线13方向,本实用新型所述永磁体21/23的磁极是沿转轴1a/3a的方向设置,如图 1a所示;所述的转轴方向即轮的平面法线10方向,该设置方向还可理解为与轮的平面线11垂直的方向,或磁极线5与转轴平行的方向,如图1b所示。图中所示的磁极线5是永磁体21/23由n、s两个磁极确定的连线及其延长线。
39.图2a和图2b是一种所述主动轮1的结构俯视、侧视示意图,结构特征是,环绕轮缘1b相间排布有4个永磁体21;该4个永磁体以n/s磁极交替的方式设置,永磁体21的磁极方向沿转轴1a的方向设置,磁极线5与转轴1a平行,永磁体21的弧长为m1,间距为m2;所述的弧长是指永磁体中心线沿轮缘切线12方向的长度,所述的间距指相邻两个永磁体之间的间距。永磁体23在变矩轮3上环绕轮缘3b相间排布的结构方案同理,磁极排布沿转轴3a的方向设置。
40.永磁体在轮缘1b/3b的设置可以安装在周面外部,也可以嵌入轮缘的内部,使永磁体外周面的弧与轮缘1b/3b的外周面重合。图3是所述变矩轮3环绕轮缘3b相间排布永磁体23的一种示例,磁极方向沿变矩轮3的转轴3a方向设置并以n、s极相间的方式排布,永磁体23嵌入轮缘3b的内部,弧长n1,间距n2。
41.主动轮1与变矩轮3以轮缘相嵌在不同平面同轴向相邻安装是与现有技术的另一区别。所述主动轮与变矩轮在不同平面安装,是两轮平面中心的平面线11不位于同一平面,优选两轮的平面线11不相交;相邻安装隐含了两轮不接触,轮缘相嵌的方式界定了两轮相邻设置的部位,两轮之间设置间隙4进一步界定了对两轮之间安装距离的技术要求;业内公知,磁作用的间隙又称气隙,是磁体之间传递磁作用的能量通道,间隙越小越有利于永磁体
之间磁能量的作用传递。
42.主动轮与变矩轮相对运行时,轮上的永磁体的运动轨迹是一条闭合的圆周线,图4a所示的是一种传动装置的优选安装示例,当主动轮1上的永磁体21与变矩轮3 上的永磁体23在旋转中周期性相对,永磁体21/23两者的磁极线5重合,此状态下永磁体21/23的磁极运动周线的投影相切,可获得主动轮与变矩轮之间磁相互作用的最大值,其沿转轴方向的俯视投影效果示意如图4b所示。
43.本实用新型中,主动轮1与变矩轮3不发生机械固连的传动,而是通过两轮的间隙4传递规律性变化的磁场能量,通过间隙磁场的分布状态改变把永磁体之间传递的磁能量变换为变矩轮的转矩,从而达到转矩传动的设计目标。
44.所述主动轮1/变矩轮3上若干永磁体的(m1+n1)=(m2+n2)是本实用新型的优选设计要点,实施精度越高,磁力传动的效果越好,所述(m1+n1)=(m2+n2)的技术优选并非要求m1=m2或n1=n2,只要(m1+n1)=(m2+n2)并且主动轮1持续旋转,就可以实现永磁体21/23之间的周期性磁力作用。所述的永磁体相间排布,优选间距平均排布,并且在不影响安装于各自轮缘的前提下不限形状。
45.所述的主动轮1、变矩轮3在传动装置中设置至少1个,意为可设计一个主动轮驱动多个变矩轮,也可以设计为多个主动轮驱动一个变矩轮,包括多个主动轮驱动多个变矩轮,图5是一个主动轮1驱动两个变矩轮3的示例。
46.本实用新型中,主动轮1和变矩轮3可采用塑钢、合金或其他固体成形材料制造而成,但材料选择各有不同特点。变矩轮的转矩是连接负载端,具有大质量有利于复合利用惯量,为此变矩轮适宜采用比重较大的无磁性合金制造;主动轮是由动力源驱动,在不影响有效向变矩轮传递磁能量的前提下,允许采用比重相对较小的材料制造,例如可采用塑钢、abs或其他固体成形材料。
47.图3示例的变矩轮设置了8个永磁体23,当需要加大变矩轮源于磁作用的转矩,可增加设置永磁体,例如设置16个永磁体23;同理,主动轮也可以增设更多个永磁体21,设计时把握(m1+n1)=(m2+n2)的优选设计原则。永磁体并非在主动轮/变矩轮缘上设置越多越好,其设置的数目受限于永磁体的磁力有效作用区间。
48.变矩轮3的转矩通常是通过转轴3a输出到负载,不少后端负载设有多级传动机构、转向机构或转轴偶联机构等,容易引起变矩轮转轴的振动或周期性偏位,在转轴3a设置磁悬浮装置是一种优选方案。此处所述的磁悬浮装置是运用永磁体同极性相斥的固有特性,为后端负载提供一种固位防震的偶联装置。所述变矩轮3与转轴 3a固连磁环的一种结构示意如图6所示,该磁环的磁极方向为:环缘外周面为n极,环内周面为s极。图6的磁环结构也可用若干截面为扇形的永磁体组合而成,若干扇形永磁体的磁极线5沿转轴的法线13方向设置,s极指向轴心。
49.本实用新型所述的电动装置包括旋转式电动机6、电源和控制系统;电动机的电源输入端连接所述电源或控制系统;电动机连接控制系统时,电源的输出端连接所述控制系统的电源输入端;电动机6的转子与主动轮1的转轴1a机械固连。
50.电动机机械固连驱动主动轮旋转的结构技术方案可以有多种,例如轴输出电动机6的转轴6a与主动轮1的转轴1a沿轴向机械固连(视为共轴),结构示意如图7 所示。电动机6也可以采用外转子式,主动轮设计为环形结构,把主动轮的环型转轴1a套装在电动机的外
转子6b上,如图8a所示。甚至可以把电动机的外转子6b 视为变形设计的主动轮1,把永磁体21设置在电动机的外转子6b上,该所述的主动轮1与电动机6的外转子6b一体化设计的一种结构方案如图8b所示。
51.本实用新型对电动旋转装置的电源来源不设限制。驱动电动机的电源可以是市网交流电,也可以是风能、太阳能或一次电池及二次电池,包括所述电动装置的控制系统在所述的传动装置的负载端通过智能控制技术方法收集的电源。
52.所述的优选例仅为推荐,若干技术方案可部分使用,也可加入或组合并用其他成熟技术,即可实现本实用新型技术方案的基本目标。
53.实施例1、
54.设计一种基于磁作用的电动旋转装置,包括电动装置和传动装置。
55.传动装置包括一个主动轮1、一个变矩轮3和12个永磁体。其中,主动轮1设计为环型,内环作为转轴1a;环绕轮缘1b相间排布有4个永磁体21,4个形状相同的永磁体21的磁极沿转轴1a的方向以n/s磁极交替的方式设置,永磁体21安装在轮缘1b的外缘,其安装结构示意如图2a、2b所示;该主动轮1上设置的永磁体21 沿轮缘1b切线12方向的弧长为m1,永磁体21之间的间距为m2。
56.变矩轮3环绕轮缘3b相间排布有8个永磁体23,8个形状相同的永磁体23的磁极沿转轴3a的方向以n/s磁极交替的方式设置,嵌入轮缘3b内安装,使永磁体 23与轮缘3b的缘弧相合,其嵌合结构的局部如图3所示;该变矩轮3上设置的永磁体23沿轮缘3b切线12方向的弧长为n1,永磁体23之间的间距为n2。
57.设在主动轮1/变矩轮3上的永磁体21/23设置为m1=m2,n1=n2。
58.传动装置安装时,主动轮1与变矩轮3以轮缘相嵌的方式在不同平面同轴向相邻安装,两轮之间的间隙4为2mm,使设置于两轮的永磁体21/23在旋转中周期性相对并且相对时磁极线5重合,安装结构示意及其效果如图4a和图4b所示。
59.电动装置包括外转子式的直流旋转电动机6、一次铝空气电池组的电源和控制系统。电动机的电源输入端连接一次铝空气电池组的电源输出端;传动装置中主动轮1 的环型转轴1a套装在电动机6的外转子6b上并机械固连,如图8a所示。
60.本实施例使用一次铝空气电池组作为电源,可满足离电网地区使用本实用新型所述的电动旋转装置。当电动机6驱动主动轮1旋转时,永磁体21对永磁体23产生了沿变矩轮3轮缘切线12方向的磁力作用,驱动变矩轮3产生绕转轴3a旋转的趋势,从而使变矩轮3获得通过主动轮1磁力作用的转矩传动。
61.实施例2、
62.在实施例1的基础上进行结构变型,其中,主动轮1上4个永磁体21沿转轴1a 的方向以n、s磁极同向的方式设置;变矩轮3上,8个永磁体23的磁极同样沿转轴 3a的方向以n、s磁极同向的方式设置;安装时,主动轮1与变矩轮3上周期性相对 (相向)的永磁体设置为磁极同极性,其余的结构不变。
63.本实施例同样可通过所述的电动旋转装置使变矩轮3获得传动转矩。
64.实施例3、
65.实施例1中,设在主动轮1/变矩轮3上的永磁体21/23设置为m1=m2,n1=n2,本实施例改设计为m1为实施例1的3/4,但(m1+n1)不变,其余的结构也不变,本实施例同样可使
变矩轮3通过主动轮1的磁力作用而获得传动转矩。
66.实施例4、
67.实施例1的传动装置是设置一个变矩轮3,本实施例设置两个变矩轮3,主动轮 1与两个变矩轮3的安装结构如图5所示。本实施例中由于设置了两个变矩轮3,可通过主动轮1的磁力作用使变矩轮获得倍增的转矩传动效果。
68.实施例6、
69.对实施例1进行技术改进:电源不采用一次铝空气电池组,电动机6的电源输入端连接电动装置的控制系统;控制系统是一个电能分配管理系统,其电源输入端在外电网、风电、太阳能装置及智能充电装置中根据实际设计选择性连接,控制系统的电源输入端包括连接二次电池组或/和变矩轮3负载端的电源输出端。
70.本实施例可实现多种来源电源对所述电动旋转装置的安全运行保障。
71.实施例7、
72.将实施例6的电动旋转装置进一步技术变形加以推广应用,用所述传动装置中的变矩轮3驱动一台功率匹配的旋转发电机,发电机转轴与变矩轮3的转轴3a之间设置有用于定位、防震的磁悬浮装置;其中,变矩轮3的转轴3a固连有一个结构如图6所示的磁环,该磁环的磁极方向为:环缘外周面为n极,环内周面为s极;发电机转轴固连的磁悬浮装置是一个由若干截面为扇形的永磁体组合成磁环机构,若干扇形永磁体的磁极线5沿转轴的法线13方向设置,组合成的磁环机构的内周面为 n极;将固连发电机转轴的磁环机构通过工艺套装入变矩轮转轴3a固连的磁环。发电机的电源输出端分流连接控制系统的电源输入端;控制系统的功能包括电能分配和充电管理,其电源输出端连接二次电池组或/和电动机6。
73.本实施例可通过控制系统的逻辑编程实现对多种来源电源的综合利用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1