智能印章机构驱动模块的制作方法
1.本实用新型涉及印章技术领域,具体的,涉及智能印章机构驱动模块。
背景技术:
2.印章是一种印于文件上表示鉴定或签署的工具,从古代就开始被使用,即使在技术高速发展的现代社会,印章在生产生活中仍然被广泛使用;传统的印章的章体暴露在外面,任何人只要持有印章就可以对印章进行随意使用,印章管理混乱,因此市面上出现了智能印章,方便对印章进行管理。目前,智能印章控制电路结构复杂、成本高。
技术实现要素:
3.本实用新型提出智能印章机构驱动模块,解决了现有技术中智能印章电路结构复杂、成本高的问题。
4.本实用新型的技术方案如下:所述印章机构包括设置在盒体内的驱动机构、印章总成和导向机构,所述驱动机构带动所述印章总成沿所述导向机构设定的轨道移动,所述驱动机构包括电机和设置在所述电机转轴上的螺杆,所述电机与控制器连接,所述螺杆用于带动所述印章总成移动,
5.所述控制器内设置有电机控制电路,所述电机控制电路包括与主控芯片连接的三极管q1和三极管q2,所述三极管q1的基极通过电阻r1与主控芯片的p11端连接,所述三极管q1的集电极与所述主控芯片的p10端连接,所述三极管q1的集电极还通过电阻r4接地,所述三极管q1的射极连接电源vdd,
6.所述三极管q2的基极通过电阻r2与所述主控芯片的p10端连接,所述三极管q2的集电极与所述主控芯片的p11端连接,通过所述三极管q2的集电极还通过电阻r5接地,所述三极管q2的射极连接电源vdd,
7.所述三极管q1的集电极还与所述电机的一个供电端连接,所述三极管q2的集电极与所述电机的另一个供电端连接。
8.进一步,所述主控芯片与所述三极管q1的集电极之间还连接有信号转换芯片u1a,所述主控芯片与所述三极管q2的集电极之间还连接有信号转换芯片u1b。
9.进一步,所述盒体内还设置有移动架,所述螺杆带动所述移动架上下移动,所述印章总成与所述移动架铰接,所述盒体内设置有限位块,所述限位块位于所述移动架下行程的末端,
10.所述控制器内还设置有堵转检测电路,所述堵转检测电路包括电阻r6、二极管d5、电容c1和电阻r7,所述电阻r6的两端用于与电流传感器的输出端并联,所述电阻r6的一端与二极管d5的阳极连接,所述二极管d5的阴极与所述电容c1的一端连接,所述电容c1的一端接地,所述电阻r7与所述电容c1并联,
11.所述电容c1远离地的一端与所述主控芯片连接。
12.进一步,所述控制器内还设置有过流保护电路,所述过流保护电路包括电阻r3,所
述电阻r3与所述电机串联,所述电阻r3的两端分别与整流桥的两个输入端连接,所述整流桥电路的输出正端u+与晶闸管scr的控制端连接,所述晶闸管scr的阳极与继电器k1线圈的一端连接,所述继电器k1线圈的另一端与直流电源vdd连接,所述继电器k1的常闭触点串联在所述电机的供电电路中。
13.进一步,还包括指示灯电路,所述指示灯电路包括依次连接的二极管led1和电阻r8,所述二极管led1和电阻r8组成的串联支路与所述继电器k1的线圈并联。
14.本实用新型的工作原理及有益效果为:
15.本实用新型中驱动机构带动印章总成沿导向机构设定的轨道移动,在需要使用印章时,将印章总成伸出盒体进行盖章,使用完毕后,将印章总成收回在盒体内,实现了盖章操作的自动化。其中,驱动机构的工作原理为:主控芯片的p10端输出高电平、p11端输出低电平,三极管q1导通、三极管q2关断,三极管q1的集电极为高电平、三极管q2的集电极为低电平,电机正向得电,电机正转,电机通过螺杆带动印章总成伸出;反之,主控芯片的p10端输出低电平、p11端输出高电平,三极管q1关断、三极管q2导通,三极管q1的集电极为低电平、三极管q2的集电极为高电平,电机反向得电,电机反转,电机通过螺杆带动印章总成收回;当需要电机停转时,主控芯片的p10端输出高电平、p11端输出高电平,三极管q1关断、三极管q2关断,三极管q1的集电极为高电平、三极管q2的集电极为高电平,电机不得电,电机停转。
16.本实用新型实现了印章总成的自动伸出和收回,而且电路结构简单、工作可靠、成本低。
附图说明
17.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
18.图1为本实用新型主视剖面图;
19.图2为本实用新型侧视剖面图;
20.图3为本实用新型中印章总成收起状态结构示意图;
21.图4为本实用新型中印章总成伸出状态结构示意图;
22.图5为本实用新型中印章总成结构示意图;
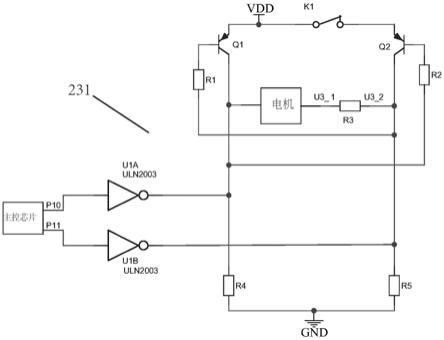
23.图6为本实用新型中电机控制电路原理图;
24.图7为本实用新型中堵转检测电路原理图;
25.图8为本实用新型中过流检测电路原理图;
26.图中:1
‑
盒体,1021
‑
挡板,1031
‑
限位板,1032
‑
限位块,2
‑
驱动机构,21
‑
电机,22
‑
螺杆,23
‑
控制器,231
‑
电机控制电路,234
‑
堵转检测电路,235
‑
过流保护电路,3
‑
移动架,31
‑
移动槽,4
‑
固定架,41
‑
分段槽,411
‑
初始段,412
‑
翻转段,413
‑
蘸墨段,42
‑
转动销,5
‑
印章总成,51
‑
印章本体,52
‑
翻转柱,53
‑
滑动槽。
具体实施方式
27.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的
所有其他实施例,都涉及本实用新型保护的范围。
28.如图1
‑
图8所示,本实施例中,印章机构包括设置在盒体1内的驱动机构2、印章总成5和导向机构,驱动机构2带动印章总成5沿导向机构设定的轨道移动,驱动机构2包括电机21和设置在电机21转轴上的螺杆22,电机21与控制器23连接,螺杆22用于带动印章总成5移动,
29.控制器23内设置有电机控制电路231,电机控制电路231包括与主控芯片连接的三极管q1和三极管q2,三极管q1的基极通过电阻r1与主控芯片的p11端连接,三极管q1的集电极与主控芯片的p10端连接,三极管q1的集电极还通过电阻r4接地,三极管q1的射极连接电源vdd,
30.三极管q2的基极通过电阻r2与主控芯片的p10端连接,三极管q2的集电极与主控芯片的p11端连接,通过三极管q2的集电极还通过电阻r5接地,三极管q2的射极连接电源vdd,
31.三极管q1的集电极还与电机21的一个供电端连接,三极管q2的集电极与电机21的另一个供电端连接。
32.本实施例中驱动机构2带动印章总成5沿导向机构设定的轨道移动,在需要使用印章时,将印章总成5伸出盒体1进行盖章,使用完毕后,将印章总成5收回在盒体1内,实现了盖章操作的自动化。其中,驱动机构2的工作原理为:如图6所示,主控芯片的p10端输出高电平、p11端输出低电平,三极管q1导通、三极管q2关断,三极管q1的集电极为高电平、三极管q2的集电极为低电平,电机21正向得电,电机21正转,电机21通过螺杆22带动印章总成5伸出;反之,主控芯片的p10端输出低电平、p11端输出高电平,三极管q1关断、三极管q2导通,三极管q1的集电极为低电平、三极管q2的集电极为高电平,电机21反向得电,电机21反转,电机21通过螺杆22带动印章总成5收回;当需要电机21停转时,主控芯片的p10端输出高电平、p11端输出高电平,三极管q1关断、三极管q2关断,三极管q1的集电极为高电平、三极管q2的集电极为高电平,电机21不得电,电机21停转。
33.如图1
‑
图5所示,导向机构包括移动架3和固定架4,电机21通过螺杆22带动移动架3上下移动,移动架3呈倒u型结构,且移动架3的侧壁设置有水平的移动槽31;固定架4设置在移动架3内部,固定架4的两个对称面与移动架3侧壁接触、且两个对称面上均设置有分段槽41和转动销42;分段槽41包括依次连接的初始段411、翻转段412和蘸墨段413,初始段411、翻转段412和蘸墨段413从固定架4底部向上排列,且每段与水平线的夹角小于前一段与水平线的夹角,其中初始段411与水平线垂直,蘸墨段413与水平线的夹角>0
°
,转动销42位于初始段411中心线与蘸墨段413的尾部中线的交点位置;印章总成5包括印章本体51、设置在印章本体51侧面的翻转柱52,及设置在印章本体51端面上的滑动槽53,转动销42滑动设置在滑动槽53内,翻转柱52滑动设置在移动槽31内。当移动架3向上移动时,移动槽31带动翻转柱52沿初始段411、翻转段412和蘸墨段413滑动,将印章总成5翻转、并收起在盒体1内。
34.盒体1内从上到下依次设置有限位板1031和挡板1021,限位板1031上设置有供螺杆22通过的孔,限位板1031位于移动架3上行程的末端,避免移动架3向上移动时撞击到驱动器;挡板1021两侧设置有供移动架3侧壁通过的导向通道。
35.本实施例实现了印章总成5的自动伸出和收回,而且电路结构简单、工作可靠、成
本低。
36.进一步,主控芯片与三极管q1的集电极之间还连接有信号转换芯片u1a,主控芯片与三极管q2的集电极之间还连接有信号转换芯片u1b。
37.主控芯片的驱动能力有限,在主控芯片和三极管q1的集电极之间连接信号转换芯片u1a,信号转换芯片u1a的具体型号为uln2003,不仅实现了主控芯片侧和电机21侧电压的转换,而且uln2003带负载能力强,有利于电机21的可靠控制。
38.进一步,盒体1内还设置有移动架3,螺杆22带动移动架3上下移动,印章总成5与移动架3铰接,盒体1内设置有限位块1032,限位块1032位于移动架3下行程的末端,
39.控制器23内还设置有堵转检测电路234,如图7所示,堵转检测电路234包括电阻r6、二极管d5、电容c1和电阻r7,电阻r6的两端用于与电流传感器的输出端并联,电阻r6的一端与二极管d5的阳极连接,二极管d5的阴极与电容c1的一端连接,电容c1的一端接地,电阻r7与电容c1并联,
40.电容c1远离地的一端与主控芯片连接。
41.如图3
‑
图4所示,当移动架3向上移动时,移动槽31带动翻转柱52沿初始段411、翻转段412和蘸墨段413滑动,实现移动架3和印章总成5的铰接。限位块1032通过螺钉连接在固定架4上,当移动架3移动到限位块1032位置时,移动架3受到限位块1032的阻挡,电机21堵转,电机21电流增大,因此主控芯片通过读取电机21电流可以判断印章总成5是否伸出到位。具体工作过程为:电流传感器用于测量电机21的工作电流,电阻r6将电流传感器输出的电流信号转换为电压信号,再经二极管d5整流、电容c1滤波后,输入到主控芯片的一个i/o引脚,当电机21的工作电流超过设定值时,主控芯片的i/o引脚接收到高电平信号,便于主控芯片及时发出指令,将电机21停转。
42.进一步,控制器23内还设置有过流保护电路235,过流保护电路235包括电阻r3,电阻r3与电机21串联,电阻r3的两端分别与整流桥的两个输入端连接,整流桥电路的输出正端u+与晶闸管scr的控制端连接,晶闸管scr的阳极与继电器k1线圈的一端连接,继电器k1线圈的另一端与直流电源vdd连接,继电器k1的常闭触点串联在电机21的供电电路中。
43.如图8所示,为避免电流过大损坏电机21,本实施例还设置有过流检测电路,电阻r3与电机21串联,用于采样电机21的电流,电阻r3两端的电压经二极管d1~d4组成的整流桥整流,整流桥的输出正端u+连接晶闸管scr的控制端,当电机21电流超过设定值时,整流桥的输出电压超过晶闸管scr的门槛电压,晶闸管scr导通,继电器k1的线圈通电,继电器k1的常闭触点断开,将电源vdd及时断开,避免对电机21造成损坏。
44.进一步,还包括指示灯电路,指示灯电路包括依次连接的二极管led1和电阻r8,二极管led1和电阻r8组成的串联支路与继电器k1的线圈并联。
45.如图8所示,二极管led1和电阻r8组成的串联支路与继电器k1的线圈并联,当继电器k1动作时,二极管led1点亮,提醒工作人员进行检修。
46.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1